You might also like
- Microc/Os-Ii Kernel Structure-IiiDocument38 pagesMicroc/Os-Ii Kernel Structure-IiiNaman KhatriNo ratings yet
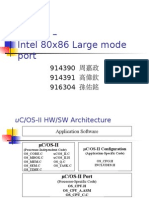
- Porting - Intel 80x86 Large Mode PortDocument30 pagesPorting - Intel 80x86 Large Mode PortSuhas ShirolNo ratings yet
- Rtos Functions: Time ManagementDocument14 pagesRtos Functions: Time ManagementHari KumarNo ratings yet
- Overview of UcosiiDocument78 pagesOverview of UcosiigafoorkadostNo ratings yet
- Chapter 03Document78 pagesChapter 03Lê Đình TiếnNo ratings yet
- Embedded Systems Lab Manual MODDocument20 pagesEmbedded Systems Lab Manual MODHari0% (1)
- Question 1 Part ADocument3 pagesQuestion 1 Part ASidra AkramNo ratings yet
- Kernel Structure - structural aspects of μC/OS-IIDocument30 pagesKernel Structure - structural aspects of μC/OS-IISurabhi BothraNo ratings yet
- Chapter 13Document56 pagesChapter 13Lê Đình TiếnNo ratings yet
- Lab11 Inlab and PostlabDocument5 pagesLab11 Inlab and PostlabHelloNo ratings yet
- Main CDocument4 pagesMain CNameNo ratings yet
- Micro c/Os II 作業系統Document31 pagesMicro c/Os II 作業系統陳鍾誠No ratings yet
- Opensslkey ArchivoDocument10 pagesOpensslkey ArchivoLuis Antonio BeltránNo ratings yet
- LCD EEPROM FunctionsDocument2 pagesLCD EEPROM FunctionsMoussa EzzaidNo ratings yet
- Implemention of Mailbox Function Using LPC2148Document5 pagesImplemention of Mailbox Function Using LPC2148imbharteshNo ratings yet
- Implemention of Message Queue Using LPC2378Document9 pagesImplemention of Message Queue Using LPC2378imbharteshNo ratings yet
- Subject:: Submitted byDocument10 pagesSubject:: Submitted byšjâd ÂLî WâttôôNo ratings yet
- Problem e LabDocument60 pagesProblem e Labaleahim576No ratings yet
- Crowbar Prot 1Document11 pagesCrowbar Prot 1kuchowNo ratings yet
- Crowbar Prot 1Document11 pagesCrowbar Prot 1kuchowNo ratings yet
- uCOS-II Kernel StructureDocument43 pagesuCOS-II Kernel StructureVishal PatelNo ratings yet
- IS Krishna (4-10)Document34 pagesIS Krishna (4-10)krishnaviramgama57No ratings yet
- Μc/Os Ii The Real-Time KernelDocument21 pagesΜc/Os Ii The Real-Time KernelVigneshwaran SdNo ratings yet
- Lab No 13Document12 pagesLab No 13M AhmedNo ratings yet
- Bootp CDocument4 pagesBootp CNameNo ratings yet
- ACPI Implants Ruxmon PresentationDocument49 pagesACPI Implants Ruxmon PresentationVIC RODNo ratings yet
- ADXL345 Sensor I2C InterfaceDocument5 pagesADXL345 Sensor I2C Interfaceavi kishuNo ratings yet
- Esdi PrintoutDocument15 pagesEsdi Printoutnagaranivo2003No ratings yet
- Adt LabDocument55 pagesAdt LabBhuvaneshNo ratings yet
- PC 5Document8 pagesPC 5Miguel RodasNo ratings yet
- RTOS SlidesDocument23 pagesRTOS SlidesShrunkhala Wankhede BadwaikNo ratings yet
- Inventory Script My - VbsDocument11 pagesInventory Script My - VbsMiteshNo ratings yet
- Assignment3 2021HT80531Document14 pagesAssignment3 2021HT80531crypto.investnmentNo ratings yet
- F - Cpu: #Define #Include #Include #IncludeDocument8 pagesF - Cpu: #Define #Include #Include #IncludePhenias ManyashaNo ratings yet
- IPC in Unix of POSIX StandardDocument6 pagesIPC in Unix of POSIX Standardsyam prasad reddyNo ratings yet
- Kaun Banega Crorepati C ProjectDocument43 pagesKaun Banega Crorepati C ProjectPrince Kumar100% (1)
- ProgramaDocument2 pagesProgramaMiguel AngelNo ratings yet
- Cracking The Manjikian FinalDocument24 pagesCracking The Manjikian FinalXanNo ratings yet
- PIRCODEDocument13 pagesPIRCODEJohn Errol MergalNo ratings yet
- Ada Lab FileDocument26 pagesAda Lab FileSHIVCHARAN SHARMANo ratings yet
- Es Lab Manual-JntukDocument22 pagesEs Lab Manual-JntukMelissa GuerraNo ratings yet
- Implemention of Message Queue Using LPC2148Document5 pagesImplemention of Message Queue Using LPC2148imbharteshNo ratings yet
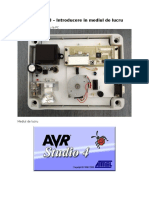
- Laborator 3 - Introducere in Mediul de LucruDocument18 pagesLaborator 3 - Introducere in Mediul de LucruGeta IvanNo ratings yet
- Laborator 3 - Introducere in Mediul de LucruDocument18 pagesLaborator 3 - Introducere in Mediul de LucruGabriela IvanNo ratings yet
- uCOSII PRNDocument59 pagesuCOSII PRNMesut HocaNo ratings yet
- C303.Chương4 TH9Document3 pagesC303.Chương4 TH9Trần Ngọc PhongNo ratings yet
- Lecture # 5Document7 pagesLecture # 5api-3812413No ratings yet
- Ee314 5Document12 pagesEe314 5Keerthi Vasan SNo ratings yet
- CS609 Assignment No. 1Document4 pagesCS609 Assignment No. 1azmat rehmanNo ratings yet
- Digital CameraDocument15 pagesDigital CamerarintansariNo ratings yet
- Lab 8Document7 pagesLab 8ubaidNo ratings yet
- U20EC086 ES Lab-6Document2 pagesU20EC086 ES Lab-6John wickNo ratings yet
- Experiment:2.2: Write A Program To Simulate Disk Scheduling Algorithms A) FCFS B) SCANDocument7 pagesExperiment:2.2: Write A Program To Simulate Disk Scheduling Algorithms A) FCFS B) SCANAnkit ThakurNo ratings yet
- Defcon-17-Bosse Eriksson-Kernel Patching On OsxDocument39 pagesDefcon-17-Bosse Eriksson-Kernel Patching On OsxStewart HendersonNo ratings yet
- Using Namespace Class Public Int: #IncludeDocument2 pagesUsing Namespace Class Public Int: #IncludeRamiro Yunior FernandezNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- 2151500Document37 pages2151500sivar22No ratings yet
- Class II GK Revision W.SDocument2 pagesClass II GK Revision W.Ssivar22No ratings yet
- Group of Our Products Academic Verification: SKU Description List Price USD Discount % Academic PriceDocument3 pagesGroup of Our Products Academic Verification: SKU Description List Price USD Discount % Academic Pricesivar22No ratings yet
- Semikron Datasheet Skiip28mli07e3v1 Applicat Kit 91287001Document25 pagesSemikron Datasheet Skiip28mli07e3v1 Applicat Kit 91287001sivar22No ratings yet
- Class II GK Revision W.SDocument2 pagesClass II GK Revision W.Ssivar22No ratings yet
- AD9364 Reference Manual UG-673Document120 pagesAD9364 Reference Manual UG-673sivar22No ratings yet
- AD9361 Reference Manual UG-570Document128 pagesAD9361 Reference Manual UG-570Kristen FieldsNo ratings yet
- 8051tk2000.pub - BiPOM ElectronicsDocument22 pages8051tk2000.pub - BiPOM Electronicssivar22No ratings yet
- FS604 FS609Document1 pageFS604 FS609sivar22No ratings yet
- Ad9361 Bist FaqDocument4 pagesAd9361 Bist Faqsivar22No ratings yet
- Department of Computing First Year Computer Hardware CourseDocument7 pagesDepartment of Computing First Year Computer Hardware Coursesivar22No ratings yet
- PO VE 6 9 Platform 0211Document5 pagesPO VE 6 9 Platform 0211sivar22No ratings yet
- Power Electronics Laboratory Using PspiceDocument4 pagesPower Electronics Laboratory Using Pspicesivar22No ratings yet
- 7 SemaphoresDocument22 pages7 Semaphoressivar22No ratings yet
- File Management: The Architecture of Computer Hardware and Systems SoftwareDocument41 pagesFile Management: The Architecture of Computer Hardware and Systems Softwaresivar22No ratings yet
- Application For Emu8086 and Proteus in Microcomputer Principle TeachingDocument4 pagesApplication For Emu8086 and Proteus in Microcomputer Principle Teachingwow try100% (1)
- PeopleSoft Design StandardsDocument20 pagesPeopleSoft Design StandardsnkravuriNo ratings yet
- Managing User Accounts in LinuxDocument5 pagesManaging User Accounts in LinuxErwinMacaraigNo ratings yet
- Loop-iNET Intelligent Network Management System: Features DescriptionDocument9 pagesLoop-iNET Intelligent Network Management System: Features DescriptionamhtetNo ratings yet
- Multiplexing LED Drive and A 4x4 Keypad SamplingDocument25 pagesMultiplexing LED Drive and A 4x4 Keypad SamplingKathleen GonzagaNo ratings yet
- Introscope MetricsDocument3 pagesIntroscope MetricsCristian MarrapodiNo ratings yet
- Manual Nera Networks Evolution Metro Revize BDocument56 pagesManual Nera Networks Evolution Metro Revize BJohn Wayne100% (2)
- Kyocera-CopyStar Trouble CodesDocument1,159 pagesKyocera-CopyStar Trouble Codestradewynnes2No ratings yet
- Regmap: The Power of Subsystems and AbstractionsDocument21 pagesRegmap: The Power of Subsystems and AbstractionsSh KoNo ratings yet
- MOTOMESH Duo 2 1 Network Setup and Installation GuideDocument137 pagesMOTOMESH Duo 2 1 Network Setup and Installation GuidealexnanowNo ratings yet
- ENG EC-BOS-2 SeriesDocument3 pagesENG EC-BOS-2 SeriesFreddyNo ratings yet
- BGPDocument43 pagesBGPtranvudtvtNo ratings yet
- Step-By-Step Guide On Deploying Revenue Sharing Blockchain Smart Contracts Using Remix-IDE On WindowsDocument27 pagesStep-By-Step Guide On Deploying Revenue Sharing Blockchain Smart Contracts Using Remix-IDE On WindowsKefa RabahNo ratings yet
- ETune1 Manual ENGDocument23 pagesETune1 Manual ENGManuel Casais TajesNo ratings yet
- 8259 Pic PDFDocument3 pages8259 Pic PDFpravin kumarNo ratings yet
- Equalis L B006 Bro GB Rev1Document2 pagesEqualis L B006 Bro GB Rev1Armel Brissy100% (1)
- DO DynamicSubscriberMgmtDocument110 pagesDO DynamicSubscriberMgmtR.k.ThapaNo ratings yet
- WEEK1 - Computer AppreciationDocument11 pagesWEEK1 - Computer AppreciationMarvin DeinlaNo ratings yet
- Cloud Hoppers Weather Station Using Arduino Uno Board and Ethernet ShieldDocument7 pagesCloud Hoppers Weather Station Using Arduino Uno Board and Ethernet ShieldPaul GomezNo ratings yet
- Cisco BGP 642-661Document61 pagesCisco BGP 642-661pjahangeer100% (1)
- Introduction To BroadbandDocument7 pagesIntroduction To BroadbandAbhishek DebNo ratings yet
- Cache MemoryDocument11 pagesCache MemoryDeepNo ratings yet
- 2CDC194003D0202-1 - MTQ22 - Modbus TCP - FBPDocument37 pages2CDC194003D0202-1 - MTQ22 - Modbus TCP - FBPFarshad MahmoudiNo ratings yet
- VNVNX5200,-VNX5400,-VNX5600-VNX5800,-VNX7600-and-VNX8000-Storage-Systems-DiskX5200, VNX5400, VNX5600 VNX5800, VNX7600 and VNX8000 Storage Systems Disk and OE MatrixDocument13 pagesVNVNX5200,-VNX5400,-VNX5600-VNX5800,-VNX7600-and-VNX8000-Storage-Systems-DiskX5200, VNX5400, VNX5600 VNX5800, VNX7600 and VNX8000 Storage Systems Disk and OE MatrixSuresh Manikantan NagarajanNo ratings yet
- Add Workflows To Your Application On SAP Cloud PlatformDocument64 pagesAdd Workflows To Your Application On SAP Cloud PlatformJagadishBabu ParriNo ratings yet
- Exam 98-361 TA: Software Development FundamentalsDocument4 pagesExam 98-361 TA: Software Development Fundamentalsawe123No ratings yet
- Book DSP - Frank Bormann PDFDocument712 pagesBook DSP - Frank Bormann PDFPRAKASH JI BARNAWAL Research Scholar, Electrical Engineering, IIT(BHU)50% (2)
- Windchill PLM ConfigDocument1 pageWindchill PLM ConfigPartibanKumarNo ratings yet
- Mtcna (Mikrotik)Document66 pagesMtcna (Mikrotik)Rahmat SugionoNo ratings yet
- 148-Fast Food Ordering System - SynopsisDocument6 pages148-Fast Food Ordering System - Synopsismcaprojects0% (2)