You might also like
- FPGA Design Tutorial - Advanced HDL SynthesisDocument4 pagesFPGA Design Tutorial - Advanced HDL SynthesisVIJAYPUTRANo ratings yet
- Fpga TutorialDocument10 pagesFpga Tutorialgsavithri_4017No ratings yet
- Low Power Design of Digital SystemsDocument28 pagesLow Power Design of Digital SystemssuperECENo ratings yet
- Design Choices - EthernetDocument29 pagesDesign Choices - EthernetJasmine MysticaNo ratings yet
- 8-Bit PIC® MicrocontrollersDocument12 pages8-Bit PIC® Microcontrollersகாஸ்ட்ரோ சின்னா100% (1)
- Ap7202-Asic and FpgaDocument12 pagesAp7202-Asic and FpgaMOTHI.R MEC-AP/ECENo ratings yet
- Embedded SystemsDocument57 pagesEmbedded SystemsSyed ZNo ratings yet
- Advanced Processor SuperscalarclassDocument73 pagesAdvanced Processor SuperscalarclassKanaga Varatharajan50% (2)
- Application of UartDocument53 pagesApplication of Uartvarsha8108100% (1)
- Semiconductor MemoriesDocument81 pagesSemiconductor MemoriesYash DodiaNo ratings yet
- Cortex R4 White PaperDocument20 pagesCortex R4 White PaperRAJARAMNo ratings yet
- Thesis On FPGADocument79 pagesThesis On FPGAAshish BabuNo ratings yet
- Power Reduction Through RTL Clock GatingDocument10 pagesPower Reduction Through RTL Clock GatingAishwarya TekkalakotaNo ratings yet
- Lecture 1: Introduction To ARM Based Embedded SystemsDocument24 pagesLecture 1: Introduction To ARM Based Embedded SystemsSaurabh HedaNo ratings yet
- Asic & Fpga Design QB For MeDocument24 pagesAsic & Fpga Design QB For MejebajohannahsamuelNo ratings yet
- Introduction To Embedded SystemsDocument50 pagesIntroduction To Embedded SystemsAmbika NaikNo ratings yet
- ESARM Unit-III and IV Slides MergedDocument301 pagesESARM Unit-III and IV Slides MergedShashipreetham LakkakulaNo ratings yet
- Uart BasicsDocument16 pagesUart BasicsM.k. JhaNo ratings yet
- ARM Processors Lecture 2015-11-05Document169 pagesARM Processors Lecture 2015-11-05maheshbabu527No ratings yet
- Introduction To Asics: Ni Logic Pvt. LTD., PuneDocument84 pagesIntroduction To Asics: Ni Logic Pvt. LTD., PuneankurNo ratings yet
- LPC 2378 Development BoardDocument160 pagesLPC 2378 Development BoardDinesh KumarNo ratings yet
- FPGA Training: by Ushasri Merugu 21 Dec 2012Document5 pagesFPGA Training: by Ushasri Merugu 21 Dec 2012rkguptha_514369372No ratings yet
- Group 12 ReportDocument18 pagesGroup 12 ReportPoonam GuptaNo ratings yet
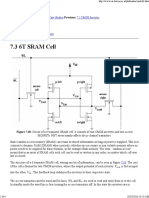
- 7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterDocument4 pages7.3 6T SRAM Cell: 7.4 Ring Oscillator 7. Case Studies 7.2 CMOS InverterGowtham SpNo ratings yet
- Asic Design Cadence DR D Gracia Nirmala RaniDocument291 pagesAsic Design Cadence DR D Gracia Nirmala RaniAdline RiniNo ratings yet
- ASICDocument34 pagesASICpankajNo ratings yet
- Introduction To System On ChipDocument110 pagesIntroduction To System On ChipKiệt PhạmNo ratings yet
- Fpga Based System DesignDocument30 pagesFpga Based System DesignKrishna Kumar100% (1)
- Advanced Asic Chip SynthesisDocument126 pagesAdvanced Asic Chip SynthesispravinNo ratings yet
- CMOS Power Dissipation and Trends: R. AmirtharajahDocument60 pagesCMOS Power Dissipation and Trends: R. AmirtharajahmarshaldvtNo ratings yet
- Low Power VLSI DesignDocument20 pagesLow Power VLSI DesignansuharshNo ratings yet
- MOSFET Scaling: Dr. Rajan Pandey Associate Professor, SENSEDocument6 pagesMOSFET Scaling: Dr. Rajan Pandey Associate Professor, SENSEVibha M VNo ratings yet
- Systems On Chip (SoC) - 01Document47 pagesSystems On Chip (SoC) - 01AlfiyanaNo ratings yet
- HWSW Co Design Unit-1notesDocument195 pagesHWSW Co Design Unit-1notesswapna revuriNo ratings yet
- Physical DesignDocument12 pagesPhysical DesignPallavi ChNo ratings yet
- Computer ArchitectureDocument104 pagesComputer ArchitectureapuurvaNo ratings yet
- MCB2300 CanDocument14 pagesMCB2300 CanMichaelNo ratings yet
- ARM Introduction-1Document26 pagesARM Introduction-1040-NishanthNo ratings yet
- Implementing A Source Synchronous Interface v2.0Document47 pagesImplementing A Source Synchronous Interface v2.0Gautham PopuriNo ratings yet
- Lecture 2 - ARM Instruction SetDocument42 pagesLecture 2 - ARM Instruction SetSuhaib AbugderaNo ratings yet
- Protyping and EmulationDocument49 pagesProtyping and EmulationAbdur-raheem Ashrafee Bepar0% (1)
- Microsoft PowerPoint - SoC Design Flow Tools CodesignDocument110 pagesMicrosoft PowerPoint - SoC Design Flow Tools CodesignRathan NNo ratings yet
- Real-Time Speech Pitch Shifting On An FPGA (Estephan Sawyer WanningerDocument20 pagesReal-Time Speech Pitch Shifting On An FPGA (Estephan Sawyer Wanningerklumpakojis0% (1)
- Embedded Systems: Theory and DesignDocument27 pagesEmbedded Systems: Theory and Designaashishkumarneelkant0% (1)
- STM 32Document8 pagesSTM 32Simone FontanaNo ratings yet
- Haps-54 March2009 ManualDocument74 pagesHaps-54 March2009 Manualjohn92691No ratings yet
- Tiva C Series LaunchPadDocument152 pagesTiva C Series LaunchPadhuyvt01No ratings yet
- ARM Interrupt ProcessingDocument33 pagesARM Interrupt Processinglovet essampongNo ratings yet
- Fpga Control Motor AsincronDocument7 pagesFpga Control Motor AsincronVasileSpireaNo ratings yet
- Hierarchical Timing Analysis WPDocument7 pagesHierarchical Timing Analysis WPvpsampathNo ratings yet
- Csa Mod 2Document28 pagesCsa Mod 2anusarat100% (1)
- Fundamentals in Digital IC DesignDocument16 pagesFundamentals in Digital IC DesignSiddharth PanditNo ratings yet
- System On Chip (SOC) (1) Chapter 1Document25 pagesSystem On Chip (SOC) (1) Chapter 1Mohammed HarisNo ratings yet
- FPGA ArchitectureDocument39 pagesFPGA ArchitectureeeshgargNo ratings yet
- Semi Custom Vlsi DesignDocument25 pagesSemi Custom Vlsi DesignPraveen KumarNo ratings yet
- Embeded Systems Unit 1Document73 pagesEmbeded Systems Unit 1Srinivasa RaoNo ratings yet
- Assignment Set I (1) UpdateDocument15 pagesAssignment Set I (1) UpdateAshish OjhaNo ratings yet
- Introduction To Embedded Systems ByshibukvDocument36 pagesIntroduction To Embedded Systems ByshibukvNyein NyeinNo ratings yet
- Embedded System IntroductionDocument42 pagesEmbedded System IntroductionHahahaNo ratings yet
- VST Case StudyDocument9 pagesVST Case StudyBobby NelsonNo ratings yet
- Homework #1Document3 pagesHomework #1Neha ShahNo ratings yet
- Ec6013 Advanced Microprocessors and Microcontrollers L T P C 3 0 0 3Document1 pageEc6013 Advanced Microprocessors and Microcontrollers L T P C 3 0 0 3VENKATRAMANNo ratings yet
- RPG400 Course MaterialDocument148 pagesRPG400 Course MaterialVISHNU40083% (6)
- Department of Electronics & Instrumentation: Question Bank: CS 2361 EMBEDDED SYSTEMDocument8 pagesDepartment of Electronics & Instrumentation: Question Bank: CS 2361 EMBEDDED SYSTEMBarkavi CharuNo ratings yet
- Two Marks Questions With Answers Embedded SystemDocument4 pagesTwo Marks Questions With Answers Embedded SystemRameshbabu RamadassNo ratings yet
- ACA NotesDocument156 pagesACA NotesSharath MonappaNo ratings yet
- Ec2303 Computer Architecture and OrganizationDocument2 pagesEc2303 Computer Architecture and OrganizationVivek Sidharth CNo ratings yet
- WRL TN 11Document20 pagesWRL TN 11kgrhoadsNo ratings yet
- Ec 2203 Digital ElectronicsDocument1 pageEc 2203 Digital ElectronicsMaheswaran UmaiyorupaganNo ratings yet
- Tetra Threat FRAMEWORK in Analysing Intel's Strategy To Sustain Competitive Advantage in MicroprocessorsDocument13 pagesTetra Threat FRAMEWORK in Analysing Intel's Strategy To Sustain Competitive Advantage in MicroprocessorskynthaNo ratings yet
- Unit-8 MPMCDocument22 pagesUnit-8 MPMCMani Kanta ReddyNo ratings yet
- Comp ArchitectureDocument59 pagesComp ArchitectureFelipePacuanBagasbas-CafeIIINo ratings yet
- Technical Jurnal For Engineering ProjectDocument7 pagesTechnical Jurnal For Engineering ProjectAshGhanesenNo ratings yet
- 3 RISC + PipelinesDocument55 pages3 RISC + PipelinesOanaMaria92No ratings yet
- Sample ChapterDocument16 pagesSample ChapterPreetham SaigalNo ratings yet
- ITCS 4141/5141 Computer Organization and Architecture Summer 2002 Barry WilkinsonDocument15 pagesITCS 4141/5141 Computer Organization and Architecture Summer 2002 Barry WilkinsondroeagleNo ratings yet
- Bhel 3Document3 pagesBhel 3Hemant PandeyNo ratings yet
- Embedded Systems Interview Questions - Embedded Systems FAQDocument6 pagesEmbedded Systems Interview Questions - Embedded Systems FAQnarendraNo ratings yet
- ARM7 - LPC 2148 ProcessorDocument50 pagesARM7 - LPC 2148 ProcessorHong ShaeNo ratings yet
- DatasheetDocument30 pagesDatasheetMarwa BoukediNo ratings yet
- Computer Architecture Question PaperDocument14 pagesComputer Architecture Question Paperheaughfrds100% (1)
- Nptel - Ac.in Aeronautical Microprocessors and Software Engineering FinalDocument148 pagesNptel - Ac.in Aeronautical Microprocessors and Software Engineering FinalMani KumarNo ratings yet
- Microcontrollers Texas Instruments MSP430: With TheDocument49 pagesMicrocontrollers Texas Instruments MSP430: With TheRekha RaniNo ratings yet
- Introduction To CryptographyDocument69 pagesIntroduction To Cryptographyachuu1987No ratings yet
- Computer Exam QuestionsDocument15 pagesComputer Exam QuestionsNiro ChweetyNo ratings yet
- 07a5ec07 ComputerorganizationDocument6 pages07a5ec07 ComputerorganizationRam KrishNo ratings yet
- IseriesDocument30 pagesIseriestebyappuNo ratings yet
- 65GZ032prg v0.11Document77 pages65GZ032prg v0.11DaveNo ratings yet
- MicroprocessorDocument3 pagesMicroprocessorManaswini ChadalavadaNo ratings yet