You might also like
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208From EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208No ratings yet
- ControladoresDocument25 pagesControladoresutghstghsNo ratings yet
- Clase 1: Materia: Sistemas de Control Profesor: Adrián Gori Ciclo Lectivo: 2021 Curso: 7mo ElectrónicaDocument11 pagesClase 1: Materia: Sistemas de Control Profesor: Adrián Gori Ciclo Lectivo: 2021 Curso: 7mo ElectrónicaNacho DacalNo ratings yet
- Presenta Control ModernoDocument23 pagesPresenta Control ModernoRyder JhymsenNo ratings yet
- Practica SERVOMECANISMO NEUMÁTICODocument10 pagesPractica SERVOMECANISMO NEUMÁTICOClara CastilloNo ratings yet
- Penduloinvertido1 PDFDocument6 pagesPenduloinvertido1 PDFJulio BarreraNo ratings yet
- Identificacion Parametrica de SistemasDocument6 pagesIdentificacion Parametrica de SistemasErick Murguia MelendezNo ratings yet
- Controles 3Document14 pagesControles 3Humberto RanioloNo ratings yet
- Sistemas de ControDocument26 pagesSistemas de ControJORGE ARIEL CHICAIZA CHILUIZANo ratings yet
- Tutorial Control PIDocument17 pagesTutorial Control PItito1513No ratings yet
- Laboratorio 1 Identificación de SistemaDocument11 pagesLaboratorio 1 Identificación de SistemaRicardo Ramírez ZapataNo ratings yet
- Practic As Control 2Document67 pagesPractic As Control 2Aldair FLNo ratings yet
- Sistema de Control Por ComputadorDocument6 pagesSistema de Control Por ComputadorClaudio Ayala BravoNo ratings yet
- Caracteristicas de Los Sistemas de Control Con RealimentacionDocument10 pagesCaracteristicas de Los Sistemas de Control Con RealimentacionRossell Villarroel BayaNo ratings yet
- Examen Extraordinario Convocatoria Septiembre CURSO 2019/2020Document4 pagesExamen Extraordinario Convocatoria Septiembre CURSO 2019/2020AgustinAlvarezAlvarezNo ratings yet
- Sistema de Seguimiento Con IntegradorDocument5 pagesSistema de Seguimiento Con IntegradorJefry CordovaNo ratings yet
- Apuntes de Cuaderno Control ClásicoDocument5 pagesApuntes de Cuaderno Control ClásicoORTG100% (1)
- Identificacion de Un Sistema de Transferencia de EnergíaDocument8 pagesIdentificacion de Un Sistema de Transferencia de EnergíaAldo Aguilar CastillejosNo ratings yet
- Practica 1 de Control Automatico 1Document10 pagesPractica 1 de Control Automatico 1carlosNo ratings yet
- Sistemas Lineales v2Document22 pagesSistemas Lineales v2Freddy GarciaNo ratings yet
- Métodos de Identificación de ModelosDocument19 pagesMétodos de Identificación de ModelosJoel RuizNo ratings yet
- 05 Fase1Document10 pages05 Fase1Edwin Javier Diaz PerezNo ratings yet
- Intervalos de PrediccionDocument30 pagesIntervalos de PrediccionPablo Fuentes PobleteNo ratings yet
- Unidad IDocument29 pagesUnidad IMiker Roca TorresNo ratings yet
- Digital ControlerDocument56 pagesDigital ControlerEdgar AldásNo ratings yet
- Modelos Matematicos de Sistemas Fisicos.Document32 pagesModelos Matematicos de Sistemas Fisicos.Claudio Valdes GutierrezNo ratings yet
- Trabajo Colaborativo Etapa 1 Grupo 243005 - 26Document11 pagesTrabajo Colaborativo Etapa 1 Grupo 243005 - 26emilio alvaradoNo ratings yet
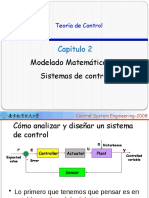
- 2016-1 Capítulo #2 Modelado Matemático de Sistemas de ControlDocument77 pages2016-1 Capítulo #2 Modelado Matemático de Sistemas de ControlHector Vergara100% (1)
- Tarea 4 - Angie Mora-Control. UNADDocument14 pagesTarea 4 - Angie Mora-Control. UNADVanessa MoraNo ratings yet
- Sistemas LTI en Espacio de EstadoDocument26 pagesSistemas LTI en Espacio de EstadoRuben VelazquezNo ratings yet
- Control de Velocidad y Sentido de Un Motor DCDocument20 pagesControl de Velocidad y Sentido de Un Motor DCMarcelo QuispeNo ratings yet
- Control Lineal y Control No LinealDocument16 pagesControl Lineal y Control No LinealolpNo ratings yet
- ASIYSEG6E4RRSDDocument24 pagesASIYSEG6E4RRSDDanae Guadalupe Perez NicolasNo ratings yet
- Tecnicas de Control ClasicoDocument11 pagesTecnicas de Control ClasicoYelibeth BoraureNo ratings yet
- Practica 1 Control ClasicoDocument8 pagesPractica 1 Control ClasicoDîon D. OviedoNo ratings yet
- Amplificadores: Sistemas de Ecuaciones DiferencialesDocument10 pagesAmplificadores: Sistemas de Ecuaciones DiferencialesJoan JoseNo ratings yet
- Unidad 1: Procesamiento de Señales Digitales Indira Cassaleth GarridoDocument116 pagesUnidad 1: Procesamiento de Señales Digitales Indira Cassaleth GarridoVictor Rodrigo Cruz DelgadoNo ratings yet
- Lab 5 Control II (Trans Z)Document14 pagesLab 5 Control II (Trans Z)Jose Antonio Sanchez PinilloNo ratings yet
- Control Pid de HornoDocument20 pagesControl Pid de HornoMr LosingNo ratings yet
- Modelado Matemático de Sistemas FísicosDocument44 pagesModelado Matemático de Sistemas FísicosRicardoSntiagoNo ratings yet
- Lectura PID 2Document5 pagesLectura PID 2Ronald Alejandro Chaupin BautistaNo ratings yet
- Tarea 8 Proyecto Equipo Toluca-VillahermosaDocument6 pagesTarea 8 Proyecto Equipo Toluca-Villahermosajonathan rocheNo ratings yet
- Etapa 1 Sistemas DinamicosDocument12 pagesEtapa 1 Sistemas DinamicosJCORREALESNo ratings yet
- Informe RecuperatorioDocument10 pagesInforme RecuperatorioPablo SolizNo ratings yet
- Primer Parcial 2020 PDFDocument61 pagesPrimer Parcial 2020 PDFMaxter Dragon100% (1)
- Reporte - Practica4 Control PIDDocument9 pagesReporte - Practica4 Control PIDLuis Angel Martinez RamirezNo ratings yet
- Practica 4 PDFDocument27 pagesPractica 4 PDFMiguel GuerreroNo ratings yet
- Practica 3. Espacio de EstadoDocument21 pagesPractica 3. Espacio de EstadoLUISNo ratings yet
- Obtencion de La Funcion de Transferencia PDFDocument18 pagesObtencion de La Funcion de Transferencia PDFPatricio Antonio Cortés PeñaNo ratings yet
- Co Af2Document5 pagesCo Af2Marco ContrerasNo ratings yet
- TEMA 1v3 Introduccion Al Control AutomaticoDocument66 pagesTEMA 1v3 Introduccion Al Control Automaticojavgar6702No ratings yet
- Notas de Clase - BermeoDocument57 pagesNotas de Clase - BermeoGustavo AvilaNo ratings yet
- Tema2a RegAuto GDocument68 pagesTema2a RegAuto GOrni TorrincoNo ratings yet
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaFrom EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaNo ratings yet
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasFrom EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasRating: 2.5 out of 5 stars2.5/5 (3)
- Metodología básica de instrumentación industrial y electrónicaFrom EverandMetodología básica de instrumentación industrial y electrónicaRating: 4 out of 5 stars4/5 (12)
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311From EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Rating: 2 out of 5 stars2/5 (1)
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasFrom EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasRating: 5 out of 5 stars5/5 (1)
- Aproximaci N Inteligencia Artificial Ciberseguridad 1702126083Document107 pagesAproximaci N Inteligencia Artificial Ciberseguridad 1702126083Ricardo MaldonadoNo ratings yet
- Complemento - Unidad 2Document3 pagesComplemento - Unidad 2Quetie Hmport AiNo ratings yet
- Mod 00 Transparencias PDFDocument21 pagesMod 00 Transparencias PDFChristian MarcNo ratings yet
- Informe ElecDocument8 pagesInforme ElecJuan CuervoNo ratings yet
- Modelo de Referencia OSIDocument7 pagesModelo de Referencia OSIDeleresiSanIsidroNo ratings yet
- Decisiones Comerciales en ZaraDocument5 pagesDecisiones Comerciales en ZaraYerty Reyes LuceroNo ratings yet
- Delitos InformáticosDocument109 pagesDelitos InformáticosAlberto SuarezNo ratings yet
- Hackear Redes Wifi (Actualizado 2019) - ... On, Wep, Wpa, Wpa2k (Actualizado 2019)Document20 pagesHackear Redes Wifi (Actualizado 2019) - ... On, Wep, Wpa, Wpa2k (Actualizado 2019)mexicanxdfNo ratings yet
- Dirección de Personas en Las OrganizacionesDocument4 pagesDirección de Personas en Las OrganizacionesMV Camilo0% (1)
- Act1 - Cuadro Comparativo - GeoDocument6 pagesAct1 - Cuadro Comparativo - Geojose alejandro aguilar santanaNo ratings yet
- Limitar Ancho de BandaDocument2 pagesLimitar Ancho de BandaManuel CruzNo ratings yet
- Gesm U1 A1 IrggDocument4 pagesGesm U1 A1 IrggLizeth GuerraNo ratings yet
- Guia Didactica para La Gestion Del ProyectoDocument26 pagesGuia Didactica para La Gestion Del Proyectogreen live travelNo ratings yet
- Desarrollo de Un Sistema de Reconocimiento Del Estado de Los Cultivos de Café en Tiempo Real Usando Redes Neuronales ArtificialesDocument8 pagesDesarrollo de Un Sistema de Reconocimiento Del Estado de Los Cultivos de Café en Tiempo Real Usando Redes Neuronales ArtificialesArmando Uribe ChurtaNo ratings yet
- Mantenimiento Pro ExpoDocument23 pagesMantenimiento Pro Expomiguel carrascoNo ratings yet
- Ejercicios A. Mat. Iii Verano 2020Document9 pagesEjercicios A. Mat. Iii Verano 2020Alexis Miguel RSNo ratings yet
- Tarea 2 SociologiaDocument3 pagesTarea 2 SociologiaLUIS JAVIER ECHEVERRIANo ratings yet
- Inteligencia CriminalDocument24 pagesInteligencia CriminalJose LopezNo ratings yet
- Fab LabDocument4 pagesFab LabAna Gabriela MartinezNo ratings yet
- Scopus Mayor Navegador AcademicoDocument6 pagesScopus Mayor Navegador AcademicoLuis Fernando Bermeo AlvarezNo ratings yet
- Formato Nota Tecnica Tipos de Redes Segun El AreaDocument8 pagesFormato Nota Tecnica Tipos de Redes Segun El AreaJOEL LEONARDO FRANCO SOLORZANONo ratings yet
- Qué Son Los Circuitos en Serie y Circuitos en ParaleloDocument2 pagesQué Son Los Circuitos en Serie y Circuitos en Paraleloclugo78No ratings yet
- Bsi g03 Es-1Document8 pagesBsi g03 Es-1Javier InzaurgaratNo ratings yet
- Informe de TopograficoDocument24 pagesInforme de Topograficojemy Cutipa RamosNo ratings yet
- Anexo 3 - Plantilla Tarea 1 (4) LETRA EDocument11 pagesAnexo 3 - Plantilla Tarea 1 (4) LETRA ETatiana hernandez HernandezNo ratings yet
- U2 - A2 DISTRIBUCIÓN DE FRECUENCIAS Primera Parte 2021 - 2Document15 pagesU2 - A2 DISTRIBUCIÓN DE FRECUENCIAS Primera Parte 2021 - 2rca_38841No ratings yet
- Abreviados - Kit de GuardiaDocument207 pagesAbreviados - Kit de Guardiasosaheriberto20018404No ratings yet
- Semana 1 - Métodos de Transporte - LinealDocument45 pagesSemana 1 - Métodos de Transporte - LinealAlanisNo ratings yet
- Manual Del Panasonic KX TG3612Document40 pagesManual Del Panasonic KX TG3612vsalt2010100% (1)
- Sercotec Capital SemillaDocument6 pagesSercotec Capital SemillaJosé Ricardo Pérez SanhuezaNo ratings yet