You might also like
- Design of Single Stage Reduction GearboxDocument6 pagesDesign of Single Stage Reduction GearboxJulien Reddi83% (6)
- Fabozzi Solution ManualDocument21 pagesFabozzi Solution ManualNhlanhla ZuluNo ratings yet
- Bulk Material Handling: Practical Guidance for Mechanical EngineersFrom EverandBulk Material Handling: Practical Guidance for Mechanical EngineersRating: 5 out of 5 stars5/5 (1)
- A2 37+Transformer+Reliability+SurveyDocument57 pagesA2 37+Transformer+Reliability+Surveyrsantana100% (2)
- Drag and Flight Conveyors Design CalculationDocument3 pagesDrag and Flight Conveyors Design Calculationsudip giri100% (1)
- Bucket Elevator Calculation - Rev. 1Document8 pagesBucket Elevator Calculation - Rev. 1Jose David Jurado100% (4)
- Apron Feeder Power Calculations PDFDocument4 pagesApron Feeder Power Calculations PDFtuba25% (4)
- Conveyor Pulley DesignDocument2 pagesConveyor Pulley DesignZoebair100% (1)
- Chain Conveyor CapacityDocument1 pageChain Conveyor Capacitysubathramesh100% (1)
- Chain Pull and Power Calculation - WC 2125 KGMDocument2 pagesChain Pull and Power Calculation - WC 2125 KGMdeddy ariyanto100% (1)
- Belt Feeder Calculation CEMADocument7 pagesBelt Feeder Calculation CEMANAITIK100% (4)
- BELT CONVEYOR - Discharge TrajectoryDocument3 pagesBELT CONVEYOR - Discharge TrajectorySergio Diaz DuarteNo ratings yet
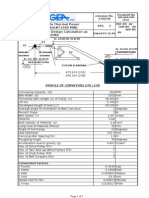
- Project: Vijayawada Thermal Power Station, Stage-IV Unit#7 (500 MW) Subject: Conveyor Design Calculation As Per 5th Edition of CEMADocument7 pagesProject: Vijayawada Thermal Power Station, Stage-IV Unit#7 (500 MW) Subject: Conveyor Design Calculation As Per 5th Edition of CEMASara Lopez100% (8)
- Belt Conveyor CalcsDocument3 pagesBelt Conveyor Calcsjnmanivannan100% (4)
- Belt Feeder Calc. Pns Line 1Document4 pagesBelt Feeder Calc. Pns Line 1Waris La Joi Wakatobi67% (3)
- GUIA de BibliometrixDocument62 pagesGUIA de BibliometrixrobinsonortizsierraNo ratings yet
- Drag Chain Conveyor Design With Capacity 45 Ton Per HourDocument7 pagesDrag Chain Conveyor Design With Capacity 45 Ton Per HourImam SampoernoNo ratings yet
- Conveyor Chains TsubakiDocument184 pagesConveyor Chains Tsubakitepu msosaNo ratings yet
- Chain ConveyorsDocument11 pagesChain Conveyorssgupta_61579683% (6)
- 5566 Drag ConveyorsDocument8 pages5566 Drag ConveyorsEduardo SaucedoNo ratings yet
- Bucket Elevator Design StudyDocument24 pagesBucket Elevator Design StudyIrfan AhmedNo ratings yet
- Screw ConveyorDocument4 pagesScrew ConveyorRaji SuriNo ratings yet
- BELT FEEDER Preliminary Dimension IngDocument29 pagesBELT FEEDER Preliminary Dimension Ingshani5573100% (1)
- Design and Selection of Chain ConveyorDocument30 pagesDesign and Selection of Chain ConveyorGanesh.Mahendra100% (1)
- Screw Conveyor DesignDocument8 pagesScrew Conveyor DesignPavan Kumar100% (1)
- Discharge Screw Conveyors Design SelectionDocument5 pagesDischarge Screw Conveyors Design SelectionHadid100% (1)
- Jenikes' TheoryDocument209 pagesJenikes' TheoryMohammad Bataineh100% (1)
- Belt Conveyor Take Up DesignDocument4 pagesBelt Conveyor Take Up DesignKroya HunNo ratings yet
- Conveyor Chain SelectionDocument2 pagesConveyor Chain SelectionAmeya Datrange100% (3)
- CEMA8 5pgDocument5 pagesCEMA8 5pgkmats100% (2)
- Hoist DesignDocument16 pagesHoist DesignluisparedesNo ratings yet
- Bucket ElevatorDocument2 pagesBucket ElevatorAndrés Lagos Méndez100% (5)
- Japan Pipe Belt Conveyor Sy...Document7 pagesJapan Pipe Belt Conveyor Sy...salkan_rahmanovic810No ratings yet
- Screw Conveyor CalculationDocument1 pageScrew Conveyor Calculation113314No ratings yet
- Chain Conveyor PT MagmaDocument22 pagesChain Conveyor PT MagmaendriaberNo ratings yet
- Conveyors and ChutesDocument2 pagesConveyors and ChutesGanesan Balraj50% (2)
- Drag Chain ConveyorsDocument20 pagesDrag Chain Conveyorsmseif1980No ratings yet
- TS of Travelling TripperDocument10 pagesTS of Travelling TripperShashank HegdeNo ratings yet
- Chain Conveyor ExampleDocument4 pagesChain Conveyor ExampledeeptidhaNo ratings yet
- Conveyor Chain ManualDocument172 pagesConveyor Chain ManualRoni SaputraNo ratings yet
- Bucket Elevator ChainDocument4 pagesBucket Elevator Chainluisreng100% (1)
- Bearing Centre and Face Width in Conveyor PulleyDocument8 pagesBearing Centre and Face Width in Conveyor PulleyPrashant MishraNo ratings yet
- Belt Tension CalculationDocument5 pagesBelt Tension Calculationmanoj983@gmail.comNo ratings yet
- Conveyor Pulley Failure Analysis PDFDocument3 pagesConveyor Pulley Failure Analysis PDFriysallNo ratings yet
- Belt Conveyor CalcsDocument3 pagesBelt Conveyor Calcspandu_chemengNo ratings yet
- Beumer Overland Belt Conveyor enDocument16 pagesBeumer Overland Belt Conveyor enIgor San Martín PeñalozaNo ratings yet
- Extract From The Book Belt FeederDocument93 pagesExtract From The Book Belt FeederPushp Dutt100% (1)
- Habasit Chain Conveyor DesignDocument62 pagesHabasit Chain Conveyor DesignchikoopandaNo ratings yet
- Mechanical Conveyors: 29 Materials HandlingDocument2 pagesMechanical Conveyors: 29 Materials HandlingSMNCI Cadet EngineersNo ratings yet
- Belt Conveyors With Shaft SizingDocument5 pagesBelt Conveyors With Shaft SizingRakhi Mor100% (2)
- Screw Take UpsDocument7 pagesScrew Take Upsjonodo89No ratings yet
- Optimizing Screw ConveyorDocument6 pagesOptimizing Screw ConveyorChem.Engg100% (1)
- Screw Conveyor CalculationDocument14 pagesScrew Conveyor Calculationvvijaybhan100% (2)
- 10 Drag Conveyor Section VIIDocument11 pages10 Drag Conveyor Section VIIBUDAPESNo ratings yet
- Bucket ElevatorsDocument16 pagesBucket Elevatorssdmel100% (3)
- Gear Design 2Document15 pagesGear Design 2cracking khalifNo ratings yet
- MD Full ReportDocument43 pagesMD Full ReportMEjiNasRizNo ratings yet
- Career Episode 3 Design and Analysis of Two-Stage Constant Reduction GearboxDocument7 pagesCareer Episode 3 Design and Analysis of Two-Stage Constant Reduction GearboxNishar Alam Khan 19MCD0042No ratings yet
- Lead Screw SelectionDocument21 pagesLead Screw Selectionaushad3mNo ratings yet
- Suspensions Design2Document10 pagesSuspensions Design2Swapnil KumarNo ratings yet
- Design and Optimization of Roller Conveyor SystemDocument5 pagesDesign and Optimization of Roller Conveyor SystemAnkit SrivastavaNo ratings yet
- Final Sprocket New 24Document65 pagesFinal Sprocket New 24Madhu M ReddyNo ratings yet
- Ball Screw Pair Design of Elevating Mechanism For Hybrid ForkliftDocument5 pagesBall Screw Pair Design of Elevating Mechanism For Hybrid ForkliftPacy MugishoNo ratings yet
- Transport Phenomena Fluid Mechanics Problem Solution BSL - Parabolic Mirror Fabrication From Free Surface Shape of Rotating LiquidDocument5 pagesTransport Phenomena Fluid Mechanics Problem Solution BSL - Parabolic Mirror Fabrication From Free Surface Shape of Rotating LiquidyudhaputraNo ratings yet
- Accomplishment ReportDocument4 pagesAccomplishment ReportJEMUEL RABELLEZANo ratings yet
- Aspects of Rhythm in Webern's Atonal Music - FORTE, Allen PDFDocument22 pagesAspects of Rhythm in Webern's Atonal Music - FORTE, Allen PDFDimitrios Sykias100% (1)
- STPM Maths T Assignment Introduction ExampleDocument2 pagesSTPM Maths T Assignment Introduction ExampleLing YiNo ratings yet
- Taleb - Against VaRDocument4 pagesTaleb - Against VaRShyamal VermaNo ratings yet
- Cobol Interview QuestionsDocument4 pagesCobol Interview QuestionshudarulNo ratings yet
- Chapter 5Document102 pagesChapter 5antutuNo ratings yet
- Matrix Algebra For Engineers PDFDocument108 pagesMatrix Algebra For Engineers PDFRosella LunaNo ratings yet
- PMP 6 Edition Questions & Answer: Page 1 of 15Document15 pagesPMP 6 Edition Questions & Answer: Page 1 of 15Prakash SelvarajNo ratings yet
- ANN DocDocument2 pagesANN Docsonali PradhanNo ratings yet
- WhatsNew 2016 en PDFDocument54 pagesWhatsNew 2016 en PDFMiguel CbNo ratings yet
- Amador-Bello High School: Quarter I Subject: GENERAL Mathematics Date: - Content StandardDocument6 pagesAmador-Bello High School: Quarter I Subject: GENERAL Mathematics Date: - Content StandardDindin Oromedlav LoricaNo ratings yet
- Perspective Rectangle Detection: David Shaw and Nick BarnesDocument9 pagesPerspective Rectangle Detection: David Shaw and Nick BarnesfreedownNo ratings yet
- Linear Algebra Chapter 5Document53 pagesLinear Algebra Chapter 5bhameed-1958No ratings yet
- Surveying II O18 R15 3012Document3 pagesSurveying II O18 R15 3012Sufaira ShahadiyaNo ratings yet
- Hedging Option Greeks PDFDocument10 pagesHedging Option Greeks PDFpiyush_rathod_13No ratings yet
- Math - Final Time LessonDocument12 pagesMath - Final Time Lessonapi-272910790No ratings yet
- Conditional Statements: Intro To Algebra Farris 2015Document12 pagesConditional Statements: Intro To Algebra Farris 2015Wensyl Mae De GuzmanNo ratings yet
- EM11Document17 pagesEM11Jerry LedesmaNo ratings yet
- Read and Encircle The Letter of The Correct Answer.: Written Work No. 1 Quarter 1Document3 pagesRead and Encircle The Letter of The Correct Answer.: Written Work No. 1 Quarter 1キャス リーンNo ratings yet
- Measures of DispersionDocument45 pagesMeasures of DispersionAmir SadeeqNo ratings yet
- Theory of RXJS SlidesDocument60 pagesTheory of RXJS SlidesWeverton Perdigão TrunksNo ratings yet
- Soal Text GREETING CARDDocument1 pageSoal Text GREETING CARDuswatun hasanahNo ratings yet
- Electrodermal Act Very ImportantDocument43 pagesElectrodermal Act Very Importantexplorator1No ratings yet
- ST4S39 Systems Thinking in Strategy FormulationDocument19 pagesST4S39 Systems Thinking in Strategy Formulationjulian100% (2)
- Aspaen Colegio El Rosario Math Study Guide First GradeDocument34 pagesAspaen Colegio El Rosario Math Study Guide First GradeYARLY JOHANA TAMAYO GUZMANNo ratings yet
- 0.6 Out of 0.6 Points: Distribution As 68% Is Typically Used For Normal DistributionDocument5 pages0.6 Out of 0.6 Points: Distribution As 68% Is Typically Used For Normal Distribution高晴汝No ratings yet