You might also like
- Chapter-10 Hydro Generator Excitation Systems PDFDocument19 pagesChapter-10 Hydro Generator Excitation Systems PDFjorge furtado de freitasNo ratings yet
- Oscillator Chapter SummaryDocument9 pagesOscillator Chapter Summaryحيدر سالمNo ratings yet
- TheoryDocument5 pagesTheoryMallikarjun NaregalNo ratings yet
- Measure synchronous machine reactancesDocument6 pagesMeasure synchronous machine reactancesviksoniNo ratings yet
- ELEC317 Lecture Notes - Week 5Document35 pagesELEC317 Lecture Notes - Week 5Faith MangwanyaNo ratings yet
- Model Development and Validation of Brushless ExcitersDocument8 pagesModel Development and Validation of Brushless ExcitersAmberMeerabNo ratings yet
- Fault Analysis: As Per Ansi Standard No - Ansi/Ieeestd141-1986Document38 pagesFault Analysis: As Per Ansi Standard No - Ansi/Ieeestd141-1986Pooja YadavNo ratings yet
- Elimination of Chaotic Ferroresonance in Power Transformers Including Nonlinear Core Losses Applying of Neutral Resistance A.Abbasi M.Rostami H.Radmanesh H.AbbasiDocument6 pagesElimination of Chaotic Ferroresonance in Power Transformers Including Nonlinear Core Losses Applying of Neutral Resistance A.Abbasi M.Rostami H.Radmanesh H.AbbasiJames Ernes Llacza CarmeloNo ratings yet
- Experiments With OscillatorsDocument22 pagesExperiments With OscillatorsprasanhettiNo ratings yet
- Sequence Impedances of An AlternatorDocument8 pagesSequence Impedances of An AlternatorBhanuNo ratings yet
- Power Systems Lab ManualDocument34 pagesPower Systems Lab ManualPrashant Ramesh BurhadeNo ratings yet
- Voltage Regulator Selection and ApplicationDocument25 pagesVoltage Regulator Selection and ApplicationMohamed RashidNo ratings yet
- Unit-Iv Small-Signal Stability Analysis With ControllersDocument37 pagesUnit-Iv Small-Signal Stability Analysis With Controllershabte gebreial shrashrNo ratings yet
- Chapter 5 - v2Document84 pagesChapter 5 - v2idris ghousNo ratings yet
- Automatic Voltage Control SystemsDocument47 pagesAutomatic Voltage Control Systemsbacuoc.nguyen356No ratings yet
- Mem SCH Eng OU 4 65Document9 pagesMem SCH Eng OU 4 65Helga Ines BenzNo ratings yet
- M13-PDF-Copy of B2 Basic Training Course - M13 - Aircraft Aerodinamics, Structures and SystemsDocument267 pagesM13-PDF-Copy of B2 Basic Training Course - M13 - Aircraft Aerodinamics, Structures and SystemsKivanc Neroglu100% (9)
- Voltage Regulator StabilityDocument17 pagesVoltage Regulator StabilityMohamed RashidNo ratings yet
- Representation of Transient Stability For Power System Dynamics Using Numerical Integration Method and DampingDocument7 pagesRepresentation of Transient Stability For Power System Dynamics Using Numerical Integration Method and DampingInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- EE380 Lab Experiment 06Document6 pagesEE380 Lab Experiment 06khaled fawazNo ratings yet
- Protective Relay SettingsDocument20 pagesProtective Relay SettingsChân Gà NướngNo ratings yet
- UIU EC-II Lecture#9Document18 pagesUIU EC-II Lecture#9Montosh RoyNo ratings yet
- acs_2017s1_assn1Document5 pagesacs_2017s1_assn1MiraelNo ratings yet
- Protection Against Loss of Excitation in GeneratorsDocument5 pagesProtection Against Loss of Excitation in GeneratorsqianghoNo ratings yet
- P1 - DC Motor Position Control PDFDocument10 pagesP1 - DC Motor Position Control PDFSeptiani DitaNo ratings yet
- Control System For Unbalanced Operation of Stand-Alone Doubly Fed Induction GeneratorsDocument2 pagesControl System For Unbalanced Operation of Stand-Alone Doubly Fed Induction Generatorsravivarman_snsNo ratings yet
- EX-602 Control SystemDocument27 pagesEX-602 Control SystemdeepaknayanNo ratings yet
- 6 +ok+MEASURE+MENT+OF+SEQUENCE+REACTANCES+OF+SALIENT+POLE+SYNCHRONOUS+MACHINEDocument3 pages6 +ok+MEASURE+MENT+OF+SEQUENCE+REACTANCES+OF+SALIENT+POLE+SYNCHRONOUS+MACHINEaissmsNo ratings yet
- Subsynchronous Resonance in Series Compensated LinesDocument10 pagesSubsynchronous Resonance in Series Compensated LinesBrian HeadNo ratings yet
- CH 16 Part 2 by DR - Nouf T. MahmoodDocument24 pagesCH 16 Part 2 by DR - Nouf T. MahmoodNoof Al GhareebNo ratings yet
- 1st Pole To Clear Factor-Calculation & SignificanceDocument15 pages1st Pole To Clear Factor-Calculation & SignificanceTamjid KabirNo ratings yet
- Machine Manual PDFDocument35 pagesMachine Manual PDFh1169104No ratings yet
- Why Static ExcitationDocument15 pagesWhy Static ExcitationMohamed RashidNo ratings yet
- Week 4Document18 pagesWeek 4Syed Faras HaiderNo ratings yet
- AkhilsinghDocument13 pagesAkhilsinghalpha kumarNo ratings yet
- EE 742 - Chapter 5Document33 pagesEE 742 - Chapter 5lacrimogenoNo ratings yet
- Integrators, Differentiators, and Simple Filters: 6. PrelabDocument15 pagesIntegrators, Differentiators, and Simple Filters: 6. PrelabMIn LeNo ratings yet
- Modul P2Document10 pagesModul P2Wahjue AjhiieNo ratings yet
- "How To Design RF Circuits" - OscillatorsDocument7 pages"How To Design RF Circuits" - OscillatorsAbbas Bagherifar100% (8)
- Tuning A PID Controller For A Digital Excitation Control SystemDocument11 pagesTuning A PID Controller For A Digital Excitation Control SystemMahmoud SamyNo ratings yet
- TI Analog Design Contest: Waveform GeneratorDocument13 pagesTI Analog Design Contest: Waveform Generatorhv_chillal88No ratings yet
- Subsynchronous Resonance AnalysisDocument4 pagesSubsynchronous Resonance AnalysisijaertNo ratings yet
- Me2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDocument9 pagesMe2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDeepak RainaNo ratings yet
- Lic Unit 2,3,4Document53 pagesLic Unit 2,3,4suresh mNo ratings yet
- The Application of Dynamic Voltage Restorers (DVR) On Power Distribution Systems For Mitigation of Voltage Sags / SwellsDocument7 pagesThe Application of Dynamic Voltage Restorers (DVR) On Power Distribution Systems For Mitigation of Voltage Sags / SwellsIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Final PPT Batch 12 in Phase 2 Review 2 Final-1Document26 pagesFinal PPT Batch 12 in Phase 2 Review 2 Final-1ChaithraNo ratings yet
- Firing Circuit or Three-Phase Thyristor-Bridge RectifierDocument5 pagesFiring Circuit or Three-Phase Thyristor-Bridge RectifierArturitoNo ratings yet
- IPFC Damping Low Frequency Oscillations Using PI ControllerDocument23 pagesIPFC Damping Low Frequency Oscillations Using PI ControllerPeram AnushaNo ratings yet
- CH16 OscilatorsDocument70 pagesCH16 Oscilatorsmiathegirl9No ratings yet
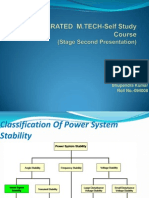
- Bhupendra Kumar Roll No.-094008: Submitted byDocument36 pagesBhupendra Kumar Roll No.-094008: Submitted bytarnedo1No ratings yet
- Starting, Speed Control....Document6 pagesStarting, Speed Control....dickmjoloNo ratings yet
- SSR in Power SystemsDocument29 pagesSSR in Power SystemsSrinivas ReddyNo ratings yet
- Electrical Engineering - EEDocument16 pagesElectrical Engineering - EEpraveenmaddy79No ratings yet
- Voltage Controlled OscillatorDocument9 pagesVoltage Controlled Oscillatorbezabwm100% (4)
- Analysis of Ac Transmisson System Using Ipfc For Damping of Low Frequency Oscillations Using Pi ControllerDocument20 pagesAnalysis of Ac Transmisson System Using Ipfc For Damping of Low Frequency Oscillations Using Pi ControllerPeram AnushaNo ratings yet
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 7000 MW Nuclear Plant Instability and Out-of-Step ProtectionDocument4 pages7000 MW Nuclear Plant Instability and Out-of-Step ProtectionadauNo ratings yet
- Wise: /wīz/ Adjective Having or Showing Experience, Knowledge, and Good Judgment: "A Wise Precaution"Document5 pagesWise: /wīz/ Adjective Having or Showing Experience, Knowledge, and Good Judgment: "A Wise Precaution"adauNo ratings yet
- Discontinuous Excitation Control Improves Transient StabilityDocument6 pagesDiscontinuous Excitation Control Improves Transient Stabilityadau100% (1)
- Fig. 13.43 Reduction of Mho Relay Angular Range: Tripping Can Occur Only For Impedance Between O and O, and Within MDocument4 pagesFig. 13.43 Reduction of Mho Relay Angular Range: Tripping Can Occur Only For Impedance Between O and O, and Within MadauNo ratings yet
- Future Perfect ContinuousDocument4 pagesFuture Perfect ContinuousadauNo ratings yet
- Unstable Case: - Area A Above P Is Less Than ADocument6 pagesUnstable Case: - Area A Above P Is Less Than AadauNo ratings yet
- Transmission Line Protection FactorsDocument6 pagesTransmission Line Protection FactorsadauNo ratings yet
- Relaying Quantities During SwingsDocument6 pagesRelaying Quantities During SwingsadauNo ratings yet
- (C) Pilot Relaying Schemes: Communication Medium May Be Pilot Wire (Metallic Wires), Power-LineDocument6 pages(C) Pilot Relaying Schemes: Communication Medium May Be Pilot Wire (Metallic Wires), Power-LineadauNo ratings yet
- Power-Angle RelationshipDocument6 pagesPower-Angle RelationshipadauNo ratings yet
- Numerical Stability of Explicit Integration MethodsDocument6 pagesNumerical Stability of Explicit Integration MethodsadauNo ratings yet
- Past Continuous: Types of Verbs Active/Passive Simple Present Present Continuous Simple Past Past ContinuousDocument4 pagesPast Continuous: Types of Verbs Active/Passive Simple Present Present Continuous Simple Past Past ContinuousadauNo ratings yet
- Models Used Must Be Appropriate For Transient Stability AnalysisDocument6 pagesModels Used Must Be Appropriate For Transient Stability AnalysisadauNo ratings yet
- Numerical Stability of Explicit Integration MethodsDocument6 pagesNumerical Stability of Explicit Integration MethodsadauNo ratings yet
- Things I Need To Know 5W, 1HDocument1 pageThings I Need To Know 5W, 1HadauNo ratings yet
- Do or WouldDocument2 pagesDo or WouldadauNo ratings yet
- Simple FutureDocument4 pagesSimple FutureadauNo ratings yet
- FutureDocument4 pagesFutureadauNo ratings yet
- Perfect PastDocument3 pagesPerfect PastadauNo ratings yet
- Active & PassiveDocument3 pagesActive & PassiveadauNo ratings yet
- QuestionsDocument6 pagesQuestionsadauNo ratings yet
- PP ContinuosDocument3 pagesPP ContinuosadauNo ratings yet
- Present ContinuousDocument4 pagesPresent ContinuousHari KumarNo ratings yet
- EasyDocument5 pagesEasyadauNo ratings yet
- TipsDocument2 pagesTipsadauNo ratings yet
- FastfDocument19 pagesFastfshawnr7376No ratings yet
- On The Insulation Co-Ordination Studies Using (Emtp)Document5 pagesOn The Insulation Co-Ordination Studies Using (Emtp)adauNo ratings yet
- Matching (Part 1)Document9 pagesMatching (Part 1)adauNo ratings yet
- Impedance Matching L-Networks at RFDocument9 pagesImpedance Matching L-Networks at RFadauNo ratings yet