You might also like
- Project Report On Pick and Place RobotDocument20 pagesProject Report On Pick and Place RobotRanvijaySharma0% (2)
- Pick and Place RobotsDocument16 pagesPick and Place RobotssvishalnNo ratings yet
- Robotic ArmDocument22 pagesRobotic Armpawansrivastava97100% (3)
- Pick and Place Arm Movement Control by AndroidDocument61 pagesPick and Place Arm Movement Control by Androidnagaraju75% (4)
- Fabrication & Controling of A Manipulator With Specific Coloured Object DetectionDocument18 pagesFabrication & Controling of A Manipulator With Specific Coloured Object DetectionTusher Saha50% (8)
- Mobile Pick and Place RobotDocument51 pagesMobile Pick and Place RobotAschalew Deneke100% (1)
- Design and Development of Robotic Arm For Cutting TreeDocument10 pagesDesign and Development of Robotic Arm For Cutting TreeMarko IvanovicNo ratings yet
- Pneumatic Powered Metal Pick and Place Arm SynopsisDocument31 pagesPneumatic Powered Metal Pick and Place Arm SynopsisBoopathi Kalai50% (2)
- Final Pick and Place ReportDocument48 pagesFinal Pick and Place ReportPraveen D JadhavNo ratings yet
- Pick and Place Robotic Arm Controlled by Computer - TJ211.42.M52 2007 - Mohamed Naufal B. OmarDocument26 pagesPick and Place Robotic Arm Controlled by Computer - TJ211.42.M52 2007 - Mohamed Naufal B. OmarSAMNo ratings yet
- Application of RFID Technology and The Maximum Spanning Tree Algorithum For Solving Vehicle Emission in Cities On IOTDocument71 pagesApplication of RFID Technology and The Maximum Spanning Tree Algorithum For Solving Vehicle Emission in Cities On IOTsrivalli pNo ratings yet
- Robotic Pick and Place Automation Using PLC For Airport Cargo SectorDocument11 pagesRobotic Pick and Place Automation Using PLC For Airport Cargo Sectorpappa20No ratings yet
- Pick and Place RobotDocument3 pagesPick and Place RobotShubhamJain100% (1)
- Line Follower Using 89s52Document43 pagesLine Follower Using 89s52coolmaleankur100% (2)
- Robotic ArmDocument17 pagesRobotic ArmAbhinavTiwariNo ratings yet
- Robotic Car Using Arduino With Bluetooth ControllerDocument8 pagesRobotic Car Using Arduino With Bluetooth ControllerSikhiva Publishing HouseNo ratings yet
- PptPick & Place RobotDocument14 pagesPptPick & Place RobotAkshay byp100% (1)
- Robotic ArmDocument23 pagesRobotic ArmKevin Blaner100% (1)
- Abstract For Robotic ArmDocument4 pagesAbstract For Robotic ArmRounak VyasNo ratings yet
- Final Copy of Line Follower RobotDocument9 pagesFinal Copy of Line Follower RobotAhuja ShivamNo ratings yet
- Modular Robots Icra2010 WorkshopDocument121 pagesModular Robots Icra2010 Workshopwasin_kNo ratings yet
- Project Report II - ModifiedDocument33 pagesProject Report II - ModifiedRupam MedhiNo ratings yet
- Modeling and SimulationDocument11 pagesModeling and SimulationZain MughalNo ratings yet
- Snake Robot ReportDocument30 pagesSnake Robot ReportAditya Vidolkar100% (1)
- Project 1 - Robotic ArmDocument19 pagesProject 1 - Robotic ArmAizzat ZackNo ratings yet
- Fyp Pick and Place RobotDocument43 pagesFyp Pick and Place Robothardyboys_cv50% (2)
- Pick and Place RobotDocument5 pagesPick and Place RobotAkhilesh MaheshwariNo ratings yet
- Speed Control of DC Motor Using Pid Controller BasedDocument16 pagesSpeed Control of DC Motor Using Pid Controller Basedayesha amjadNo ratings yet
- Robot Project Report RoboticsDocument34 pagesRobot Project Report Roboticsdcrust_amit82% (11)
- Steering Mechanism of Autonomous VehicleDocument27 pagesSteering Mechanism of Autonomous VehicleChetan SwaroopNo ratings yet
- Telepresence RobotDocument22 pagesTelepresence RobotWØRLD HÖPZNo ratings yet
- Design and Fabrication of AgriculturalDocument12 pagesDesign and Fabrication of AgriculturalShashank sinhaNo ratings yet
- Pick and Place Robot Arm For Metal and Non-Metal DetectionDocument6 pagesPick and Place Robot Arm For Metal and Non-Metal DetectionAnonymous izrFWiQ100% (1)
- Scara RobotDocument13 pagesScara RobotMuhammad Ikhsan Al-fatihNo ratings yet
- Bluetooth Controlled Pick and Place RobotDocument9 pagesBluetooth Controlled Pick and Place RobotVenkatchowdary Mamillapalli100% (2)
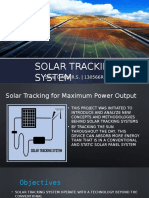
- Solar Tracking SystemDocument10 pagesSolar Tracking SystemRusiru SanjayaNo ratings yet
- AN044 Robotic ArmDocument9 pagesAN044 Robotic Armhussien amare100% (1)
- Dr. Ambedkar Institute of Technology: Under The Guidance ofDocument6 pagesDr. Ambedkar Institute of Technology: Under The Guidance ofSushanth KengunteNo ratings yet
- Project Report On Pick and Place Robot (By Chirag Joshi)Document37 pagesProject Report On Pick and Place Robot (By Chirag Joshi)Chirag85% (41)
- ScaraDocument7 pagesScaraAnand Kumar MishraNo ratings yet
- Introduction To Mentor Robotic ArmDocument2 pagesIntroduction To Mentor Robotic ArmSAMIE KHANNo ratings yet
- Power Generating Suspension SystemDocument28 pagesPower Generating Suspension SystemRachit ChaudharyNo ratings yet
- Industrial Robots Manipulator StructuresDocument18 pagesIndustrial Robots Manipulator StructuresTharindu Eranga FernandoNo ratings yet
- VOICE AND BLUETOOTH CONTROLLED ROBOT - Amit KumarDocument14 pagesVOICE AND BLUETOOTH CONTROLLED ROBOT - Amit Kumarpal sarvesh100% (1)
- Modeling and Control of A Brushless DC MotorDocument66 pagesModeling and Control of A Brushless DC MotorBalajiKRamNo ratings yet
- Solar TrackingDocument87 pagesSolar TrackingPidikiti Surendra BabuNo ratings yet
- Starting of Induction Motor Using PLCDocument56 pagesStarting of Induction Motor Using PLCawadhesha20022033100% (3)
- Design and Control of A Robotic ArmDocument107 pagesDesign and Control of A Robotic ArmDave100% (8)
- Hydraulic-Powered Robotic Arm PDFDocument8 pagesHydraulic-Powered Robotic Arm PDFsaurabh satsangiNo ratings yet
- ConclusionsDocument2 pagesConclusionsseehari0% (1)
- Design and Construction of A Manipulator Type ScaraDocument9 pagesDesign and Construction of A Manipulator Type ScaraHari Kirupakar100% (1)
- Chapter 1Document8 pagesChapter 1alexandraanastasiaNo ratings yet
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorUNsha bee komNo ratings yet
- Design and Development of Bionic Hand Using Voice ControlDocument5 pagesDesign and Development of Bionic Hand Using Voice ControlInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Bedade Pick Place Robotic ArmDocument35 pagesBedade Pick Place Robotic Armankush belkarNo ratings yet
- We Glad To Make This Project: - PREFACEDocument10 pagesWe Glad To Make This Project: - PREFACEAnonymous 0ywnNS29EGNo ratings yet
- Alagappa Chettiar Government College of Engineering and Technology-KaraikudiDocument22 pagesAlagappa Chettiar Government College of Engineering and Technology-KaraikudiTamil SelvanNo ratings yet
- Fabrication of Pneumatic Punching and Riveting MachineDocument45 pagesFabrication of Pneumatic Punching and Riveting MachineElakkiya Karthic100% (7)
- 200918TS018 - Final ReportDocument38 pages200918TS018 - Final ReportgsmageshNo ratings yet
- Lathe ProjectsDocument5 pagesLathe ProjectsSiddharth PatelNo ratings yet
- Amul IcecreamDocument13 pagesAmul IcecreamSiddharth PatelNo ratings yet
- V.P.M.P. Polytechnic: Industrial Visit Report ONDocument12 pagesV.P.M.P. Polytechnic: Industrial Visit Report ONSiddharth PatelNo ratings yet
- Bhavani IndustriesDocument11 pagesBhavani IndustriesSiddharth PatelNo ratings yet
- Just in TimeDocument13 pagesJust in TimeSiddharth PatelNo ratings yet
- Report On Just in Time and Lean ManufacuringDocument30 pagesReport On Just in Time and Lean ManufacuringSiddharth PatelNo ratings yet
- GPC GIS Corporate BrochureDocument2 pagesGPC GIS Corporate BrochurethegpcgroupNo ratings yet
- Kinds and Parts of A Business LetterDocument17 pagesKinds and Parts of A Business Lettergwynethbaluran0002No ratings yet
- Amul Functional ManagementDocument57 pagesAmul Functional ManagementSafwan Quraishi100% (1)
- Polytechnic University of The PhilippinesDocument4 pagesPolytechnic University of The PhilippinesEmmanuel SidaNo ratings yet
- Extended KYC Annexure - Individuals (Including Sole-Proprietors) (Applicable For Resident and Non-Resident Customers) (Mandatory)Document2 pagesExtended KYC Annexure - Individuals (Including Sole-Proprietors) (Applicable For Resident and Non-Resident Customers) (Mandatory)Leo SaimNo ratings yet
- Hosaka Leg Writ MemoDocument4 pagesHosaka Leg Writ MemoojhosakaNo ratings yet
- Seaoil Petroleum Vs AutocorpDocument2 pagesSeaoil Petroleum Vs AutocorpJuna Aimee FranciscoNo ratings yet
- A Debt-Fuelled Spree That Led To $5.4B PharmEasy's Catch-22 - The KenDocument1 pageA Debt-Fuelled Spree That Led To $5.4B PharmEasy's Catch-22 - The KenKrish PatelNo ratings yet
- Thesis Statement On Oil PricesDocument8 pagesThesis Statement On Oil Pricesf5a1eam9100% (2)
- ReportDocument40 pagesReportdandansarabia100% (2)
- Chapter 2: Salaries.: Computation of Income Under The Head Income From "Salaries"Document8 pagesChapter 2: Salaries.: Computation of Income Under The Head Income From "Salaries"Varun AadarshNo ratings yet
- Research Issues Within Contemporary Management 1044243Document26 pagesResearch Issues Within Contemporary Management 1044243Ravi Kumawat100% (1)
- SI-WI-8.1-3 Ver 2.1 Work Instruction For Vendor ApprovalDocument14 pagesSI-WI-8.1-3 Ver 2.1 Work Instruction For Vendor ApprovalVKGNo ratings yet
- Chapter 6 - Managing Inventory and PayableDocument28 pagesChapter 6 - Managing Inventory and PayableFatimah Rashidi VirtuousNo ratings yet
- Pliant Therapeutics: BEACON Lights The Way Forward While Initial PSC Data Comes Into View 2Q Takeaways & Model UpdateDocument10 pagesPliant Therapeutics: BEACON Lights The Way Forward While Initial PSC Data Comes Into View 2Q Takeaways & Model Updatemengfanqi1996No ratings yet
- SRM Lambert 2012Document18 pagesSRM Lambert 2012JHORJAN STIVEN GONZALEZ ROMERONo ratings yet
- Termination Contract BlankDocument1 pageTermination Contract BlankManu Khanna0% (1)
- Cost Output RelationshipDocument17 pagesCost Output RelationshipAnonymous 1ClGHbiT0JNo ratings yet
- Course Out BoomDocument8 pagesCourse Out BoomrahulkatareyNo ratings yet
- 2000 2001 PDFDocument1,272 pages2000 2001 PDFmuhammad aliNo ratings yet
- Corporate Law and Corporate Governance: Ummar Ziauddin LLM Berkeley, Barrister of Lincoln's InnDocument34 pagesCorporate Law and Corporate Governance: Ummar Ziauddin LLM Berkeley, Barrister of Lincoln's InnNooria YaqubNo ratings yet
- Statements 7810Document4 pagesStatements 7810CrazyNo ratings yet
- NRF National Retail Security Survey 2023Document24 pagesNRF National Retail Security Survey 2023Veronica Silveri100% (1)
- Reliance Industries LimitedDocument17 pagesReliance Industries LimitedAananNo ratings yet
- PDF Sample 3Document2 pagesPDF Sample 3Edmark PedranoNo ratings yet
- 5 Fort Bonifacio Development Corporation vs. CIR - ConsolidatedDocument45 pages5 Fort Bonifacio Development Corporation vs. CIR - ConsolidatedGoodyNo ratings yet
- Op Transaction History UX527!05!2023Document8 pagesOp Transaction History UX527!05!2023srm finservNo ratings yet
- FULL Download Ebook PDF International Management Managing Across Borders and Cultures Text and Cases 8th Edition PDF EbookDocument41 pagesFULL Download Ebook PDF International Management Managing Across Borders and Cultures Text and Cases 8th Edition PDF Ebookapril.odum14797% (33)
- Edited ListeningSpeaking Lesson Plan With TechnologyDocument3 pagesEdited ListeningSpeaking Lesson Plan With TechnologyKevin Sebastian Patarroyo GalindoNo ratings yet
- BMAU Policy Brief 15-19-Financing Local Governments - Exploiting The Potential of Local RevenueDocument4 pagesBMAU Policy Brief 15-19-Financing Local Governments - Exploiting The Potential of Local RevenueKharim SseguyaNo ratings yet