You might also like
- Exercices d'optique et d'électromagnétismeFrom EverandExercices d'optique et d'électromagnétismeRating: 5 out of 5 stars5/5 (1)
- La Radioactivité PDFDocument20 pagesLa Radioactivité PDFBreathe 4 footballNo ratings yet
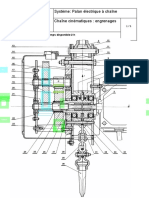
- Cours PPTschemacineDocument25 pagesCours PPTschemacineboys-hakars100% (1)
- 1-Effet Hall CorrectionDocument1 page1-Effet Hall CorrectionEL Mansouri Achraf100% (2)
- Circuits Electriques PDFDocument324 pagesCircuits Electriques PDFEmma NtiNo ratings yet
- CC (Métrologie DIP) 20 21 (S5)Document4 pagesCC (Métrologie DIP) 20 21 (S5)Amal CHAINENo ratings yet
- Les Moteurs MotoreducteursDocument19 pagesLes Moteurs Motoreducteursboys-hakarsNo ratings yet
- Choix Des Conducteurs Et Protection.07Document101 pagesChoix Des Conducteurs Et Protection.07medmouchrifNo ratings yet
- Le RedressementDocument22 pagesLe Redressementanes bendjemaiNo ratings yet
- Transformateurs Triphases PDFDocument19 pagesTransformateurs Triphases PDFFiras WalhaNo ratings yet
- STI Genie Electronique PhyApplDocument17 pagesSTI Genie Electronique PhyApplLetudiant.frNo ratings yet
- TD N°3 Cinématique Du Contact PonctuelDocument4 pagesTD N°3 Cinématique Du Contact PonctuelAmine RbzNo ratings yet
- Statique - CoursDocument2 pagesStatique - Coursboys-hakarsNo ratings yet
- Exercices - Cotation Fonctionnelle CorrigeDocument9 pagesExercices - Cotation Fonctionnelle CorrigeLaurent MansieuxNo ratings yet
- Construction de Fresnel.Document4 pagesConstruction de Fresnel.1youb tvNo ratings yet
- Étau ModélismeDocument3 pagesÉtau ModélismeAdrien LupinNo ratings yet
- Ge Esa 1Document6 pagesGe Esa 1othmane mrichNo ratings yet
- EP Chap-4 1 RedresseursDocument42 pagesEP Chap-4 1 RedresseursMAS FATALNo ratings yet
- Technique CDocument8 pagesTechnique CAdnen BOUAZIZINo ratings yet
- Chapitre 3-Reseau Triphase PDFDocument21 pagesChapitre 3-Reseau Triphase PDFAE07No ratings yet
- Chapitre 4Document6 pagesChapitre 4OnésimeNo ratings yet
- Résumé Génératrices À Courant Continu À Excitation ShuntDocument1 pageRésumé Génératrices À Courant Continu À Excitation ShuntPurple SocialNo ratings yet
- Verin Simple Effet ExerciceDocument2 pagesVerin Simple Effet ExerciceSoumeya MachtaNo ratings yet
- Examen 1 Mécanique Noncorrection Normale 1 3 Mpi 2018-2019 UcadDocument1 pageExamen 1 Mécanique Noncorrection Normale 1 3 Mpi 2018-2019 UcadBleou Thierry Koua50% (2)
- Exercice Chape Dessin CoteDocument2 pagesExercice Chape Dessin CoteABDELHAKIMNo ratings yet
- C2-Chap2 Pneu4 PDFDocument3 pagesC2-Chap2 Pneu4 PDFseid aroussi100% (1)
- TD N°3 Transmission de Puissance Par EngrenageDocument3 pagesTD N°3 Transmission de Puissance Par Engrenagemed amine elaachNo ratings yet
- Variateur - Exercice PDFDocument2 pagesVariateur - Exercice PDFyassine safraouiNo ratings yet
- TD 1 EngreanagesDocument3 pagesTD 1 EngreanagesAbdellah FaqdaniNo ratings yet
- Cours - MCC - IntroductionDocument8 pagesCours - MCC - IntroductionLa ReinaNo ratings yet
- Auto - 1 - 2023 OkDocument8 pagesAuto - 1 - 2023 OkfjosephfabriceNo ratings yet
- SERIE12345 Semestre 2Document15 pagesSERIE12345 Semestre 2Sabrina BenghenameNo ratings yet
- Cours PHYSIQUE Tle-F1-2023Document117 pagesCours PHYSIQUE Tle-F1-2023koffi DOUNEGBLOE100% (1)
- CH 5 Circuits Lineaires en Regime Sinusoidal MonophaseDocument17 pagesCH 5 Circuits Lineaires en Regime Sinusoidal Monophasekonan ezekielNo ratings yet
- PhA ESA 2018Document8 pagesPhA ESA 2018othmane mrichNo ratings yet
- TP 6 - Moteur Asynchrone A Cage (Caractéristiques Et Fonctionnement) (1) (Récupéré)Document12 pagesTP 6 - Moteur Asynchrone A Cage (Caractéristiques Et Fonctionnement) (1) (Récupéré)ayanokojiNo ratings yet
- Chap2 Leçon2 3&4Document52 pagesChap2 Leçon2 3&4Guiliass100% (2)
- 5grafcet Exercice 04Document1 page5grafcet Exercice 04KingSqueed 888No ratings yet
- Série 3 2020-2021Document2 pagesSérie 3 2020-2021Siwar AbbesNo ratings yet
- TD 05 Corrigé - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreDocument6 pagesTD 05 Corrigé - Comportement Temporel Des SLCI Proportionnel, Dérivateur, Intégrateur Et Du 1er OrdreMohamed AbaakilNo ratings yet
- TD Palan Électrique À Chaine1Document4 pagesTD Palan Électrique À Chaine1xz4 zertoxNo ratings yet
- PFS 2 ForcesDocument8 pagesPFS 2 ForcesSegaAlainCoulibalyNo ratings yet
- Etude D'un Système PluritechniqueDocument13 pagesEtude D'un Système PluritechniqueScofieldNo ratings yet
- Devoir Libre (19-12-2018)Document4 pagesDevoir Libre (19-12-2018)Riham abNo ratings yet
- TD-Alternatif Et PuissanceDocument24 pagesTD-Alternatif Et PuissanceBakr IbrahimiNo ratings yet
- TD de Maxwell EquationDocument3 pagesTD de Maxwell EquationKay Chan SothearaNo ratings yet
- Devoir de Synthèse N°1 - Génie Électrique Tri de Boitiers - Bac Technique (2014-2015) MR YagoubiDocument8 pagesDevoir de Synthèse N°1 - Génie Électrique Tri de Boitiers - Bac Technique (2014-2015) MR YagoubiFethi BenmassoudeNo ratings yet
- 11 Exercices Corrigés Sur Convertisseurs Statiques 2 Bac Science Dingenieur PDFDocument6 pages11 Exercices Corrigés Sur Convertisseurs Statiques 2 Bac Science Dingenieur PDFAbdelmalik BendaikhaNo ratings yet
- Corrigé TD 3 ELT 2021 2022Document3 pagesCorrigé TD 3 ELT 2021 2022Linda KoundziNo ratings yet
- App3 Rep STE STM SMB PDFDocument10 pagesApp3 Rep STE STM SMB PDFNSANGOUNo ratings yet
- Serie de TD 5Document2 pagesSerie de TD 5halim otmane100% (1)
- Chapitre 3 - SNL - Methode Du Premier HarmoniqueDocument8 pagesChapitre 3 - SNL - Methode Du Premier HarmoniqueFe ThiNo ratings yet
- Devoir Sq8 StatiqueDocument8 pagesDevoir Sq8 StatiqueRuben100% (1)
- Compte Rendu TP Logique NS442 N°03Document4 pagesCompte Rendu TP Logique NS442 N°03Nardjes BenNo ratings yet
- EC3 RLC SerieDocument10 pagesEC3 RLC SeriejiheneNo ratings yet
- DS 03Document16 pagesDS 03ايوب العرباويNo ratings yet
- Cours Transfo Reel Et PDFDocument19 pagesCours Transfo Reel Et PDFمحمد الواثقNo ratings yet
- Examens National 2bac Sci Genieur SMB 2012 R PDFDocument27 pagesExamens National 2bac Sci Genieur SMB 2012 R PDFHanane TounsiNo ratings yet
- TD AsynchDocument2 pagesTD AsynchKadri MongiNo ratings yet
- (PFS) (TD) Camion Grue PDFDocument2 pages(PFS) (TD) Camion Grue PDFEl Youbi MohammedNo ratings yet
- TD CIN Graphique - Pompe A PetroleDocument3 pagesTD CIN Graphique - Pompe A Petrolesallsmart100% (1)
- DP Elec 13 - 14Document4 pagesDP Elec 13 - 14Elafif HamdiNo ratings yet
- Theorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteDocument8 pagesTheorie Des Mecanismes Hyperstatisme, Mobilite, Liaison EquivalenteothmaneNo ratings yet
- Rapport TP) 2020Document45 pagesRapport TP) 2020KAWTAR EL AMRINo ratings yet
- Triphase TDDocument4 pagesTriphase TDPse UdoNo ratings yet
- FSytintese RDMDocument1 pageFSytintese RDMboys-hakarsNo ratings yet
- TDR - RDMV RivisionDocument1 pageTDR - RDMV Rivisionboys-hakarsNo ratings yet
- Dis Posit If de Freinage Auto Continu 3Document1 pageDis Posit If de Freinage Auto Continu 3boys-hakarsNo ratings yet
- Chapitre 1 Dynamique Du Solide 2020Document16 pagesChapitre 1 Dynamique Du Solide 2020saada boboNo ratings yet
- Exercices Machine Courant ContinuDocument23 pagesExercices Machine Courant ContinufatiNo ratings yet
- 01 Signaux05 ARQSDocument7 pages01 Signaux05 ARQSMohamed CHARIFNo ratings yet
- Exos MCCDocument11 pagesExos MCCDé NizNo ratings yet
- 21 OEM Td-CorrigeDocument12 pages21 OEM Td-CorrigeMamadi Sylla100% (1)
- TD Radioacivite 2013 Lsll-WahabDiopDocument4 pagesTD Radioacivite 2013 Lsll-WahabDiopAnis DahnenNo ratings yet
- Cours D'électricité 1ère CDocument9 pagesCours D'électricité 1ère CFahankor OuattaraNo ratings yet
- Daniel MentrardDocument12 pagesDaniel MentrardazizayaNo ratings yet
- Serie de Révision16 2015 PDFDocument2 pagesSerie de Révision16 2015 PDFAzizElheni100% (1)
- LubrificationDocument8 pagesLubrificationIkram MORSLINo ratings yet
- Exercice AdDocument4 pagesExercice AdRamzi Ramzi100% (1)
- Physique 3 Vibrations Linéaires Et Ondes Mécaniques: Leçon N°7: Systèmes Soumis À Une Force Sinusoïdale (2 Partie)Document48 pagesPhysique 3 Vibrations Linéaires Et Ondes Mécaniques: Leçon N°7: Systèmes Soumis À Une Force Sinusoïdale (2 Partie)Youssef EL MliliNo ratings yet
- Rattrapage Physi I 2011-2012 FinalDocument2 pagesRattrapage Physi I 2011-2012 FinalFarid BelalNo ratings yet
- 2016 Antilles Exo1 Correction RayonsX 6ptsDocument4 pages2016 Antilles Exo1 Correction RayonsX 6ptsVladimirNo ratings yet
- Sciences Indus Cpge - Papanicola.info EquilibrageDocument6 pagesSciences Indus Cpge - Papanicola.info Equilibragehichamino-225No ratings yet
- GP 404B P Electromagnétique Semestre 1Document32 pagesGP 404B P Electromagnétique Semestre 1Rabah G PhNo ratings yet
- Boschrexroth VentielenDocument44 pagesBoschrexroth VentielenKhôi ĐàoNo ratings yet
- TD N°1 ADC MonophaséDocument2 pagesTD N°1 ADC MonophaséOum Solayman100% (1)
- Aperçu Du Réseau Électrique Nord-Américain Et de SesDocument12 pagesAperçu Du Réseau Électrique Nord-Américain Et de SesMister R100% (1)
- S - Rie D'exercices Gravitation Universelle (WWW - Pc1.ma)Document7 pagesS - Rie D'exercices Gravitation Universelle (WWW - Pc1.ma)mohamed bignaneNo ratings yet
- Chap3 Difference PotentielDocument9 pagesChap3 Difference PotentielMohemed ElyefrahiNo ratings yet
- DM09 1213Document4 pagesDM09 1213mahaNo ratings yet
- Magnetostatique 2222Document17 pagesMagnetostatique 2222mouradgourmajNo ratings yet
- COURS Electricité Industrielle Chap1 1Document17 pagesCOURS Electricité Industrielle Chap1 1Youcef MimouniNo ratings yet
- Correction DS12 MI2 M23Document4 pagesCorrection DS12 MI2 M23Gemma Prieto AguilarNo ratings yet