You might also like
- Taller Ejercicios Estimacion de Incertidumbre PDFDocument5 pagesTaller Ejercicios Estimacion de Incertidumbre PDFanpipe19No ratings yet
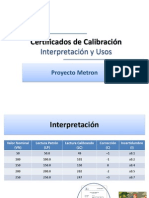
- Certificados de CalibracionDocument8 pagesCertificados de Calibracionanpipe19No ratings yet
- Analisis Funcional de La Cuchara SoperaDocument1 pageAnalisis Funcional de La Cuchara Soperaanpipe19No ratings yet
- Curso de Extrusion IiDocument98 pagesCurso de Extrusion Iialfgraga604387% (15)
- Rendimientos de Maquinaria para Aeropuerto 20220404Document21 pagesRendimientos de Maquinaria para Aeropuerto 20220404Rodolfo De La Garza O.No ratings yet
- Importancia de La Expresión Corporal y en La Educación PrimariaDocument2 pagesImportancia de La Expresión Corporal y en La Educación PrimariaMonse VillegasNo ratings yet
- Matrices MaDocument9 pagesMatrices Mamiguel_giraldo_10No ratings yet
- YorkiDocument1 pageYorkiCinthya Stefanie Vara ArrateaNo ratings yet
- Informe de Laboratorio de Biologia 1Document9 pagesInforme de Laboratorio de Biologia 1aaaa1234qwerNo ratings yet
- Fundacion El Amanecer Del Alma Retiro de Yoga y MeditacionDocument4 pagesFundacion El Amanecer Del Alma Retiro de Yoga y MeditacionParameshwar Aum AnandajiNo ratings yet
- Taller Primer Corte Métodos Númericos 2020-C2 PDFDocument10 pagesTaller Primer Corte Métodos Númericos 2020-C2 PDFJuan Esteban Garavito BuitragoNo ratings yet
- Mapa Mental - Historia de La CalidadDocument1 pageMapa Mental - Historia de La CalidadSARAI LEAL ZUNIGANo ratings yet
- Informe-Hormigón Postensado 2Document34 pagesInforme-Hormigón Postensado 2ElxjuanzhoOrmeño67% (3)
- 2.2. Plan de Vida y CarreraDocument18 pages2.2. Plan de Vida y CarreraFreddy SolísNo ratings yet
- Green, Jane - Nadie Es PerfectoDocument258 pagesGreen, Jane - Nadie Es PerfectoJosefina PascualNo ratings yet
- Braniff, Beatriz. Sistemas Agrícolas Prehispánicos en La Gran ChichimecaDocument11 pagesBraniff, Beatriz. Sistemas Agrícolas Prehispánicos en La Gran ChichimecaMiguel RamirezNo ratings yet
- Joan CostaDocument2 pagesJoan Costalibu50% (1)
- Matemática 1er GradoDocument26 pagesMatemática 1er GradoLucia Solana ForteteNo ratings yet
- Tema Investigacion FinalDocument38 pagesTema Investigacion FinalRodrigo RSNo ratings yet
- Estimulacion Temprana ExposicionDocument33 pagesEstimulacion Temprana ExposicionPAOLITA0% (1)
- Hostigamiento Sexual en El EmpleoDocument62 pagesHostigamiento Sexual en El EmpleoLJL,LLCNo ratings yet
- Prefabricados de HormigonDocument93 pagesPrefabricados de HormigonAlejandro Vasquez100% (2)
- Investigacion Del Cuidado de Los ÁrbolesDocument3 pagesInvestigacion Del Cuidado de Los ÁrbolesAlex VirgenNo ratings yet
- Adorno - Teoría Estética, Lo Bello NaturalDocument26 pagesAdorno - Teoría Estética, Lo Bello NaturalFiniNo ratings yet
- Planificación de La Conversación 2021 - 2022Document7 pagesPlanificación de La Conversación 2021 - 2022yeison tupuro100% (2)
- Mas Relaciones Entre EspeciesDocument5 pagesMas Relaciones Entre EspeciesFabio Rol100% (1)
- Realizacion de Curvas de Calibración para Proteínas y Azúcares ReductoresDocument6 pagesRealizacion de Curvas de Calibración para Proteínas y Azúcares ReductoresFeerNo ratings yet
- Resultado CurricularDocument6 pagesResultado Curricularandrea2412No ratings yet
- Vitoc 2010-2014Document32 pagesVitoc 2010-2014Gilmer Robin Paredes RamirezNo ratings yet
- Carta de Colaboladores R&TDocument57 pagesCarta de Colaboladores R&Tismator2489No ratings yet
- Bilingüismo Demora El Envejecimiento CerebralDocument1 pageBilingüismo Demora El Envejecimiento CerebralcamatuteNo ratings yet
- Análisis F.O.D.ADocument3 pagesAnálisis F.O.D.AGloria barrueta natividadNo ratings yet
- Mapa ConceptualDocument1 pageMapa ConceptualJhasminWandurragaNo ratings yet
- Capitulo 08 Dosificaciones para Las Mezclas de ConcretoDocument31 pagesCapitulo 08 Dosificaciones para Las Mezclas de ConcretoAngie CaroNo ratings yet