You might also like
- Transmission AW30-40LE ModelDocument266 pagesTransmission AW30-40LE ModelIRAKLI DVALADZE50% (2)
- 2012-06-02 093357 w934 Electronic Drive Control Eas Function PDFDocument4 pages2012-06-02 093357 w934 Electronic Drive Control Eas Function PDFعبدالغني القباطي100% (2)
- ADM3 Manual Rev1101Document230 pagesADM3 Manual Rev1101danila99100% (6)
- Safety and Reference: Owner'S ManualDocument84 pagesSafety and Reference: Owner'S ManualjpmcorpNo ratings yet
- Isuzu Transmission AW30 40LE Model Workshop ManualDocument266 pagesIsuzu Transmission AW30 40LE Model Workshop ManualjuanNo ratings yet
- Mbe Electronic Vcu Adm PLDDocument314 pagesMbe Electronic Vcu Adm PLDDagar GR86% (14)
- Wiring Diagram For Engine Control (MR)Document7 pagesWiring Diagram For Engine Control (MR)naveed100% (1)
- 82497524-2-ADM2-FRO (1) Mercedez PDFDocument155 pages82497524-2-ADM2-FRO (1) Mercedez PDFAndre VP100% (3)
- Mercedes - OM 501 - OM 502 - EN OperatorsDocument122 pagesMercedes - OM 501 - OM 502 - EN OperatorsRoysen Olsen86% (43)
- 2014+ Manual (EN) 23F 24C 25B PDFDocument7 pages2014+ Manual (EN) 23F 24C 25B PDFTiago Leonhardt100% (1)
- ADM3 Manual Rev901Document207 pagesADM3 Manual Rev901Anderson Salzano89% (9)
- Mercedes Axor Fuel System Repair ManualDocument20 pagesMercedes Axor Fuel System Repair ManualStephenson75% (4)
- ADM-FR EngDocument98 pagesADM-FR Engvitor santosNo ratings yet
- Minidiag2 EDocument61 pagesMinidiag2 EJorge Alvarez Fernandez100% (9)
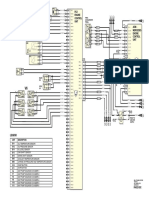
- Optimize Mercedes Benz ADM and PLD engine control unit schematicDocument1 pageOptimize Mercedes Benz ADM and PLD engine control unit schematicBassie91% (11)
- ActrosDocument100 pagesActrosrudi92% (13)
- Wiring Diagram For Actros 2540 Level Control SystemDocument11 pagesWiring Diagram For Actros 2540 Level Control SystemStephenson33% (3)
- Mercedes Benz Engine Fault Code GuideDocument37 pagesMercedes Benz Engine Fault Code GuideAda Paloma Soto Brambila90% (40)
- PLD Manual MERCEDES INJECTORS FUEL SYSTEMDocument150 pagesPLD Manual MERCEDES INJECTORS FUEL SYSTEMheehawdafty95% (182)
- Training Doc Mercedes 900Document195 pagesTraining Doc Mercedes 900mliugong98% (40)
- Offshore Electrical Engineering ManualFrom EverandOffshore Electrical Engineering ManualRating: 4 out of 5 stars4/5 (9)
- 03-303 OrbitrolDocument32 pages03-303 OrbitrolbenvacaNo ratings yet
- 08.1 - Electro-Pnuematic Shift, EPS (GS) 1 - Functional Diagram ACTROS, Models 950-954 With Transmission 715.55Document1 page08.1 - Electro-Pnuematic Shift, EPS (GS) 1 - Functional Diagram ACTROS, Models 950-954 With Transmission 715.55fugega80% (10)
- Manual Injeção Mercedes Bens DetroitDocument160 pagesManual Injeção Mercedes Bens DetroitDmitry100% (9)
- Temic Istruction ConnectorDocument10 pagesTemic Istruction ConnectorRuberli de LimaNo ratings yet
- Actros MP4 Water RetarderDocument13 pagesActros MP4 Water RetarderAlexandru Nicola75% (4)
- 4 Parameterisation PDFDocument11 pages4 Parameterisation PDFslobodan pena100% (1)
- Commonrail XeMANDocument47 pagesCommonrail XeMANYên Ngỗng97% (70)
- Engine tightening torque guideDocument9 pagesEngine tightening torque guideBassie100% (1)
- EST-42 GearboxDocument64 pagesEST-42 GearboxVilneda75% (12)
- ManualDocument197 pagesManualomar100% (1)
- GS DescDocument4 pagesGS DescCostel CaramanNo ratings yet
- Buildings Utilities 2Document21 pagesBuildings Utilities 2Rachel PetersNo ratings yet
- MAN EDC MS6.1 With Exhaust Gas Recirculation EGR (EURO 3)Document6 pagesMAN EDC MS6.1 With Exhaust Gas Recirculation EGR (EURO 3)Mircea Gilca67% (3)
- PLD ADM 906 Scematic PDFDocument1 pagePLD ADM 906 Scematic PDFBassie100% (2)
- Adm2 FR Operating Manual 15.07.02Document160 pagesAdm2 FR Operating Manual 15.07.02renat67% (6)
- Temic Istruction ConnectorDocument10 pagesTemic Istruction ConnectorLuiz Gustavo Pereira75% (4)
- Minidiag eDocument33 pagesMinidiag eservice911100% (2)
- Drive Control (FR) FunctionDocument3 pagesDrive Control (FR) Functionمحمد يونس100% (3)
- 150 7122meredes Benz 904 Engine Service ManualDocument73 pages150 7122meredes Benz 904 Engine Service ManualIsaque Mateus75% (20)
- Drive Control (CPC) Unit Component DescriptionDocument2 pagesDrive Control (CPC) Unit Component DescriptionrudiNo ratings yet
- Mantenimiento Mercedes OM 457Document65 pagesMantenimiento Mercedes OM 457ncavalletti100% (10)
- Manual ADMII Mercedez PDFDocument163 pagesManual ADMII Mercedez PDFAnonymous nhF45C100% (2)
- Mercedes ActrosDocument1 pageMercedes Actrossmole7957% (14)
- Mercedes Actros Pneumatic Diagram For BS (Brakes) by OkovaDocument9 pagesMercedes Actros Pneumatic Diagram For BS (Brakes) by OkovaStephenson75% (4)
- 2+adm2 FroDocument155 pages2+adm2 FroAna Erice90% (20)
- Micom 631 Technical ManualDocument532 pagesMicom 631 Technical ManualRuel De Villa100% (4)
- 623 Engine Management PorscheDocument242 pages623 Engine Management PorscheNguyễn Ngọc Văn100% (1)
- ADM PLD: Mercdes Benz AND Schematic For Om501La All Large Adt'SDocument1 pageADM PLD: Mercdes Benz AND Schematic For Om501La All Large Adt'SBassie100% (4)
- Gpu Yamaha Edl20000te, Edl26000te - q9c 28197 E0Document38 pagesGpu Yamaha Edl20000te, Edl26000te - q9c 28197 E0Moni Gote del Ortus100% (1)
- Medium Voltage Solid State OEM Soft Starter: Installation & Operation ManualDocument88 pagesMedium Voltage Solid State OEM Soft Starter: Installation & Operation ManualRajesh Vyas100% (1)
- MPR 6 3 DGF Instruction ManualDocument31 pagesMPR 6 3 DGF Instruction ManualAbner VarillasNo ratings yet
- Mitsubishi s6s PDFDocument48 pagesMitsubishi s6s PDFMoni Gote del OrtusNo ratings yet
- 239 ManDocument158 pages239 Mancristian gonzalezNo ratings yet
- DSP2 Manual PDFDocument147 pagesDSP2 Manual PDFEcaterina Irimia100% (2)
- Arico Fa1Document84 pagesArico Fa1vadikcazac67% (3)
- P63X en M A54Document554 pagesP63X en M A54hecnatNo ratings yet
- 3-Phase AC Motor Control With V/HZ Speed Closed Loop Using The DSP56F80XDocument24 pages3-Phase AC Motor Control With V/HZ Speed Closed Loop Using The DSP56F80Xrutu_jnecNo ratings yet
- nx64 g703Document16 pagesnx64 g703matt1606100% (1)
- Microcontroller Motor Protection Relay SettingsDocument9 pagesMicrocontroller Motor Protection Relay SettingsAyush KumarNo ratings yet
- Manual Vanguard ATRT-03Document150 pagesManual Vanguard ATRT-03JuanJose2012No ratings yet
- 3UF5 SIMOCODE-DP System Motor Protection and Control DeviceDocument20 pages3UF5 SIMOCODE-DP System Motor Protection and Control DeviceKamal TomarNo ratings yet
- Proddocspdf 2 261Document80 pagesProddocspdf 2 261B.k. BirtiaNo ratings yet
- LT6 CatalogueDocument24 pagesLT6 CatalogueMohamed Elsayed HasanNo ratings yet
- MSP 430 F 5336Document104 pagesMSP 430 F 5336teomondoNo ratings yet
- Danfoss FC51 DesignGuideDocument94 pagesDanfoss FC51 DesignGuideahirraodhavalNo ratings yet
- MC9S08FL16Document34 pagesMC9S08FL16saom09No ratings yet
- AN2295Document52 pagesAN2295Fernando ArrowNo ratings yet
- Tiristores PDFDocument288 pagesTiristores PDFMoni Gote del OrtusNo ratings yet
- (500g PDFDocument33 pages(500g PDFMoni Gote del OrtusNo ratings yet
- Wh1602b Ygk CPDocument20 pagesWh1602b Ygk CPMoni Gote del OrtusNo ratings yet
- AN2295Document52 pagesAN2295Fernando ArrowNo ratings yet
- PIC16F84A DataSheetDocument88 pagesPIC16F84A DataSheetEmanueleNo ratings yet
- TLD ASU-600 180-300 Jet Engine Air StarterDocument2 pagesTLD ASU-600 180-300 Jet Engine Air StarterMoni Gote del Ortus100% (1)
- Tiristores PDFDocument288 pagesTiristores PDFMoni Gote del OrtusNo ratings yet
- HGTG 24 N 60 D 1 DDocument5 pagesHGTG 24 N 60 D 1 DMoni Gote del OrtusNo ratings yet
- PIC16F84A DataSheetDocument88 pagesPIC16F84A DataSheetEmanueleNo ratings yet
- Userfiles Catalogos Automotive Cables Type GPT PDFDocument3 pagesUserfiles Catalogos Automotive Cables Type GPT PDFMoni Gote del OrtusNo ratings yet
- Pin Macho 39000082 para Conector 39012141 DatasheetDocument4 pagesPin Macho 39000082 para Conector 39012141 DatasheetMoni Gote del OrtusNo ratings yet
- Agency Certification: Part Number: Status: Overview: DescriptionDocument4 pagesAgency Certification: Part Number: Status: Overview: DescriptionMoni Gote del OrtusNo ratings yet
- Agency Certification: Part Number: Status: Overview: DescriptionDocument4 pagesAgency Certification: Part Number: Status: Overview: DescriptionMoni Gote del OrtusNo ratings yet
- Trojan Black Box 6 VoltDocument3 pagesTrojan Black Box 6 VoltDantes KebreauNo ratings yet
- Low Voltage and Medium Voltage Capacitor Banks Reduce Unnecessary CostsDocument2 pagesLow Voltage and Medium Voltage Capacitor Banks Reduce Unnecessary CostsGooge ReviewerNo ratings yet
- Assignment 2: Page 2-2 Page 2-2Document10 pagesAssignment 2: Page 2-2 Page 2-2Eliaquim RomanNo ratings yet
- Chương 2 Resistor Chua DichDocument49 pagesChương 2 Resistor Chua Dichnâu conNo ratings yet
- Dual-band ultra-wideband antenna with variable electrical tiltDocument2 pagesDual-band ultra-wideband antenna with variable electrical tiltAdi PrasetyoNo ratings yet
- Beam Steering Control System For Low-Cost Phased Array Weather RaDocument220 pagesBeam Steering Control System For Low-Cost Phased Array Weather RaIvan WaakoNo ratings yet
- Computers GenerationsDocument7 pagesComputers GenerationsBubrikaNo ratings yet
- Powercommand Digital Master Control: FeaturesDocument12 pagesPowercommand Digital Master Control: FeaturesthainarimeNo ratings yet
- KV LDR Physics ProjectDocument13 pagesKV LDR Physics ProjectZedS1yzNo ratings yet
- SU0524 - Datasheet: 4-Channel Low Capacitance Esd Protection Diodes ArrayDocument9 pagesSU0524 - Datasheet: 4-Channel Low Capacitance Esd Protection Diodes Arraytemp001100% (1)
- 12HRL700 Bateria 180ah-200ahDocument2 pages12HRL700 Bateria 180ah-200ahJesusGonzalesNo ratings yet
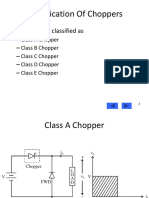
- Classification of Choppers: - Choppers Are Classified AsDocument30 pagesClassification of Choppers: - Choppers Are Classified AskanithanNo ratings yet
- EM Saver - Hardware ModuleDocument5 pagesEM Saver - Hardware ModulesagoobobbyNo ratings yet
- Sequential Circuits Hardware Description Language: LectureDocument38 pagesSequential Circuits Hardware Description Language: LecturemarwaNo ratings yet
- Manual de Utilizare Electro-Voice ZLX-15BT (48 Pagini)Document3 pagesManual de Utilizare Electro-Voice ZLX-15BT (48 Pagini)edurapihNo ratings yet
- sickC4000Basic - OI - GB Bariera OpticaDocument60 pagessickC4000Basic - OI - GB Bariera OpticaFlorin TarziuNo ratings yet
- Altivar Machine ATV340 - ATV340U15N4Document17 pagesAltivar Machine ATV340 - ATV340U15N4PhaniNo ratings yet
- Arduino Pulse Sensor TutorialDocument7 pagesArduino Pulse Sensor Tutorialarduino signaux cardiaquesNo ratings yet
- Traveller Friendly Smart Luggage SystemDocument5 pagesTraveller Friendly Smart Luggage SystemSuman NaikarNo ratings yet
- Clipsal Burglar Alarm System - 5400 & 5400/16CBDocument30 pagesClipsal Burglar Alarm System - 5400 & 5400/16CBGreen ButtonNo ratings yet
- B202v103 ModemDocument2 pagesB202v103 ModemObey O MadzivireNo ratings yet
- BLDC DriveDocument37 pagesBLDC DriveLasya Ganapathi100% (1)
- ML-1110 / ML-1110.SCI Maxlogic Intelligent Analogue Addressable Smoke Detector / Short Circuit IsolatorDocument20 pagesML-1110 / ML-1110.SCI Maxlogic Intelligent Analogue Addressable Smoke Detector / Short Circuit Isolatorbc020400673No ratings yet
- ECA Unit 1Document48 pagesECA Unit 1Komalaselvan VNo ratings yet
- Circuit Breaker Panelboards I-LINE-2020Document36 pagesCircuit Breaker Panelboards I-LINE-2020Juan Manuel Paz ArevaloNo ratings yet
- Reemplazo de IC Equivalente en LaptopDocument9 pagesReemplazo de IC Equivalente en LaptopLeonardo Diego100% (1)