You might also like
- Marine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsFrom EverandMarine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsRating: 4.5 out of 5 stars4.5/5 (3)
- Multi-Engine Submarine Power SuppliesDocument14 pagesMulti-Engine Submarine Power Suppliesdavid2404100% (2)
- ModernNaval Solutions - 2final - Ohmayer.nov 2012cDocument39 pagesModernNaval Solutions - 2final - Ohmayer.nov 2012cPriscila KImNo ratings yet
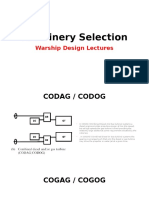
- Machinery Selection and Warship Design LecturesDocument31 pagesMachinery Selection and Warship Design Lecturesknowme73No ratings yet
- Combined Marine Propulsion PDFDocument10 pagesCombined Marine Propulsion PDFSea Man Mkt100% (1)
- Engine Layout and Selection GuideDocument26 pagesEngine Layout and Selection GuideX SxUxGxAxR XNo ratings yet
- Electro-Hydraulic Steering Gears by YOOWON INDUSTRIES LTDDocument8 pagesElectro-Hydraulic Steering Gears by YOOWON INDUSTRIES LTD123habib123fikri67% (3)
- Hybrid and electric marine propulsion overviewDocument6 pagesHybrid and electric marine propulsion overviewy_durNo ratings yet
- Bab 9 Shaft Propulsion Arrangement PDFDocument51 pagesBab 9 Shaft Propulsion Arrangement PDFAwan AJaNo ratings yet
- +diesel Electric Propulsion Plants Engineering GuidelineDocument27 pages+diesel Electric Propulsion Plants Engineering GuidelinelesmosNo ratings yet
- Marine Propulsion For Small CraftsDocument71 pagesMarine Propulsion For Small CraftsGermán Aguirrezabala100% (1)
- Electric Motor in Ship PropulsionDocument13 pagesElectric Motor in Ship PropulsionConcept of ReasoningNo ratings yet
- Engine Layout and Load Diagrams ExplainedDocument11 pagesEngine Layout and Load Diagrams ExplainedSanjeet Kanungo100% (1)
- 5 Propeller DesignDocument50 pages5 Propeller DesignAnca GeaninaNo ratings yet
- Marine Power CatalogueDocument98 pagesMarine Power Cataloguesafaa salamNo ratings yet
- Azipod ReferencesDocument22 pagesAzipod ReferencesVlad MocanuNo ratings yet
- STP330Document14 pagesSTP330waleedyehiaNo ratings yet
- Marine Propulsion SystemsDocument5 pagesMarine Propulsion SystemsIbrahim SameirNo ratings yet
- Propellers PDFDocument61 pagesPropellers PDFfaridNo ratings yet
- Kappel PropellersDocument11 pagesKappel PropellersAylin BaturNo ratings yet
- Boost Speed and Performance with Veth Rudder PropellersDocument16 pagesBoost Speed and Performance with Veth Rudder PropellersJosepxo VarveteNo ratings yet
- GateRudder JMST 2015 PDFDocument13 pagesGateRudder JMST 2015 PDFθανασης ΓκιοκαςNo ratings yet
- Evaluation of Resistance Prediction For High-Speed Round Bilge Hull Forms - 2011Document10 pagesEvaluation of Resistance Prediction For High-Speed Round Bilge Hull Forms - 2011Maurizio BernasconiNo ratings yet
- Propulsion and ShaftingDocument31 pagesPropulsion and ShaftingPriscila KImNo ratings yet
- PROPULSION E-Motors 300609-014459 PDFDocument59 pagesPROPULSION E-Motors 300609-014459 PDFScott_B4U100% (1)
- CODAGDocument2 pagesCODAGaeromexpower2009No ratings yet
- ABS Rules For Integrated Power Systems (IPS)Document17 pagesABS Rules For Integrated Power Systems (IPS)Andreas MattheouNo ratings yet
- Tug - BUYUKDEREDocument6 pagesTug - BUYUKDEREudelmarkNo ratings yet
- Hydrodynamic Design of Planing Hulls - SavitskyDocument25 pagesHydrodynamic Design of Planing Hulls - SavitskyJuanjo Marengo100% (5)
- Yard Patrol From 108' Concept To DeliveryDocument22 pagesYard Patrol From 108' Concept To Deliverybrenno100% (1)
- Diesel Electric Propulsion Plant - MANDocument26 pagesDiesel Electric Propulsion Plant - MANThomas St100% (1)
- User Manual RV Mech SystemDocument61 pagesUser Manual RV Mech SystemSilviu Tichieru100% (1)
- Thruster EffectivityDocument190 pagesThruster Effectivityronny-su100% (2)
- Stapersma - Matching Propulsion Engine With PropulsorDocument8 pagesStapersma - Matching Propulsion Engine With PropulsorTuan Truong MinhNo ratings yet
- ITTC Trials AnalysisDocument15 pagesITTC Trials Analysispapaki2100% (1)
- The Basics of Troubleshooting Engine Room MachineryDocument5 pagesThe Basics of Troubleshooting Engine Room MachineryJhay Sustiguer100% (2)
- Propeller Design PDFDocument8 pagesPropeller Design PDFwasita wadari100% (1)
- Propeller / Hull Status Report 2009Document17 pagesPropeller / Hull Status Report 2009torbjorn25No ratings yet
- Marine Hydrodynamics Lectures Week 40Document38 pagesMarine Hydrodynamics Lectures Week 40AntonioNo ratings yet
- Bow ThrustersDocument15 pagesBow ThrustersJohn Angelo Tuliao100% (1)
- Surface Piercing PropellersDocument32 pagesSurface Piercing PropellersldigasNo ratings yet
- Design of Propulsion Systems For High-Speed CraftDocument17 pagesDesign of Propulsion Systems For High-Speed Craftaeromexpower2009No ratings yet
- The difference between M.C.R and C.S.R ratingsDocument2 pagesThe difference between M.C.R and C.S.R ratingsRavindra kumarNo ratings yet
- Marine EnginesDocument12 pagesMarine EnginesSyukry MaulidyNo ratings yet
- Propeller CatalogDocument156 pagesPropeller CatalogPoowadol NiyomkaNo ratings yet
- Development of Computer Controlled Low Speed Crosshead EnginesDocument19 pagesDevelopment of Computer Controlled Low Speed Crosshead EnginesKamal WanniarachchiNo ratings yet
- 2007 Rolls Royce Propulsion ProductsDocument24 pages2007 Rolls Royce Propulsion ProductsFlo MarineNo ratings yet
- Renk Tunnel GearboxesDocument8 pagesRenk Tunnel Gearboxeshumayun121No ratings yet
- Electromagnetic Aircraft Launch SystemDocument8 pagesElectromagnetic Aircraft Launch SystemRikhil Yalamanchi100% (1)
- GE Global Offshore & Marine Solutions Guide - 2014 EditionDocument220 pagesGE Global Offshore & Marine Solutions Guide - 2014 Editionsurabhi0706100% (1)
- Dimensional Constraints in Ship DesignDocument6 pagesDimensional Constraints in Ship DesignTat-Hien LeNo ratings yet
- Brief Presentation of Ut-Design UT 739 L: Multifunctional, Deep Water Anchor Handling, Tug, Supply and Service VesselDocument32 pagesBrief Presentation of Ut-Design UT 739 L: Multifunctional, Deep Water Anchor Handling, Tug, Supply and Service VesselCinthia Lidia Hidrogo PaulinoNo ratings yet
- Advanced Marine Vehicles Mm7xx 2009 2010 Lecture 4Document25 pagesAdvanced Marine Vehicles Mm7xx 2009 2010 Lecture 4Mohamed Abbas KotbNo ratings yet
- Propeller Selection and Optimizacion PDFDocument102 pagesPropeller Selection and Optimizacion PDFMerrel RossNo ratings yet
- 001 V 0 R 43Document36 pages001 V 0 R 43wvwinters0% (1)
- Diesel Electric Propulsion Plants Engineering GuidelineDocument27 pagesDiesel Electric Propulsion Plants Engineering GuidelineCiprian BălănuțăNo ratings yet
- Teza Doctorat Electric Ship Propulsion PDFDocument117 pagesTeza Doctorat Electric Ship Propulsion PDFpavelionut100% (1)
- Azipod Vi Project Guide v5Document36 pagesAzipod Vi Project Guide v5lujohn28No ratings yet
- Altern RudderDocument76 pagesAltern RuddercptmehmetkaptanNo ratings yet
- Small Craft Power PredictionDocument32 pagesSmall Craft Power Predictionaeromexpower2009No ratings yet
- A Study Guide To AC InvertersDocument44 pagesA Study Guide To AC InvertersMerrelNo ratings yet
- Carburized Final Drive Pinion GearsDocument36 pagesCarburized Final Drive Pinion GearsMerrelNo ratings yet
- Accionamiento Eléctrico Azipod de ABBDocument4 pagesAccionamiento Eléctrico Azipod de ABBMerrelNo ratings yet
- A Study Guide To AC InvertersDocument44 pagesA Study Guide To AC InvertersMerrelNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Accionamiento Eléctrico Azipod de ABBDocument4 pagesAccionamiento Eléctrico Azipod de ABBMerrelNo ratings yet
- A Handbook: Epicyclic GearingDocument8 pagesA Handbook: Epicyclic GearingrafeipNo ratings yet
- A Practical Approach For Design of Marine Propellers With Systematicpropeller SeriesDocument10 pagesA Practical Approach For Design of Marine Propellers With Systematicpropeller SeriesMerrel RossNo ratings yet
- Power Train MatchingDocument43 pagesPower Train MatchingMerrelNo ratings yet
- Heat Transfer Video Course Dr. GhoshalDocument2 pagesHeat Transfer Video Course Dr. GhoshalMerrelNo ratings yet
- Hvac DesignDocument348 pagesHvac DesignMichael OchoaNo ratings yet
- Hvac DesignDocument348 pagesHvac DesignMichael OchoaNo ratings yet
- Power Train MatchingDocument43 pagesPower Train MatchingMerrelNo ratings yet
- Ashrae D Aj11apr04 20110404Document9 pagesAshrae D Aj11apr04 20110404MerrelNo ratings yet
- Imo Rules Submersible VehiclesDocument24 pagesImo Rules Submersible VehiclesMerrelNo ratings yet
- Busbar DesignDocument25 pagesBusbar DesignHans De Keulenaer100% (20)
- An Approximate Power Prediction MethodDocument5 pagesAn Approximate Power Prediction MethodMerrelNo ratings yet
- fm55 509 1 Introduction To Marine ElectricityDocument369 pagesfm55 509 1 Introduction To Marine ElectricityTiter100% (9)
- Ship DesignDocument2 pagesShip DesignMerrel0% (1)
- Ship Resistance and PropulsionDocument57 pagesShip Resistance and PropulsionMerrel100% (7)
- 18MEC206J-Thermal EngineeringDocument35 pages18MEC206J-Thermal Engineeringragunath LakshmananNo ratings yet
- Refinery Furnace DesignDocument27 pagesRefinery Furnace DesignGuillermoNo ratings yet
- Ship Particular OB - Persada 2551 PDFDocument1 pageShip Particular OB - Persada 2551 PDFMusuhan Sama CacingNo ratings yet
- Final Report (Corrected) 02Document192 pagesFinal Report (Corrected) 02MuhammadObaidullahNo ratings yet
- Determination of Thermal Input Power of An Engine Driven GeneratorDocument5 pagesDetermination of Thermal Input Power of An Engine Driven GeneratorRICARDO TRAVERSO PATIÑNo ratings yet
- Heat Exchangers-Principles and Design Rev1 PDFDocument68 pagesHeat Exchangers-Principles and Design Rev1 PDFroyNo ratings yet
- Specification Sheet: Case I Case Ii Operating ConditionsDocument1 pageSpecification Sheet: Case I Case Ii Operating ConditionsKailas NimbalkarNo ratings yet
- Trickle Bed ReactorDocument23 pagesTrickle Bed ReactorgautamahujaNo ratings yet
- MAN Turbocharger Programme 2010 PDFDocument32 pagesMAN Turbocharger Programme 2010 PDFblackgateNo ratings yet
- Resistance To Fuels of Exteriors Automotive Materials and ComponentsDocument4 pagesResistance To Fuels of Exteriors Automotive Materials and ComponentsDouglas Abreu100% (1)
- Prelim 2 p3 2011 (For Sharing)Document14 pagesPrelim 2 p3 2011 (For Sharing)Yee Kai TanNo ratings yet
- 50FA14B1-4C69-4B24-8E63-8FB2FCEA6231Document1 page50FA14B1-4C69-4B24-8E63-8FB2FCEA6231Tomislav CvarNo ratings yet
- Tecumseh OV195EA - OV195XA Engine ManualDocument32 pagesTecumseh OV195EA - OV195XA Engine Manual"Rufus"0% (1)
- Classic 300 D Perkins: Operator'S ManualDocument92 pagesClassic 300 D Perkins: Operator'S ManualCoordinador - MantenimientosNo ratings yet
- Metric Conversion Table V1.0Document37 pagesMetric Conversion Table V1.0Aristotle Benjamin Padilla CrisologoNo ratings yet
- Journal of Energy and Development, Cumulative Abstracts, Volumes 1 - 39Document158 pagesJournal of Energy and Development, Cumulative Abstracts, Volumes 1 - 39The International Research Center for Energy and Economic Development (ICEED)No ratings yet
- Conflex Oil Hose Co., Ltd.Document4 pagesConflex Oil Hose Co., Ltd.jixie946No ratings yet
- Mepc.2-Circ.22 (E)Document86 pagesMepc.2-Circ.22 (E)tomislav_darlic100% (1)
- DynaPak 2010 02042002.ATEX - RevDocument60 pagesDynaPak 2010 02042002.ATEX - RevedgarNo ratings yet
- ALP Progressing Cavity Pumps Nov2010Document6 pagesALP Progressing Cavity Pumps Nov2010Steve MarfissiNo ratings yet
- 82D2-B 0501000 - Gorman RuppDocument3 pages82D2-B 0501000 - Gorman RuppGiancarlo Carmona DelgadoNo ratings yet
- Mobile Air Separation in Diesel FuelDocument2 pagesMobile Air Separation in Diesel FuellampropeltisNo ratings yet
- 7 - FTIR Analysis of Used Lubricating Oils General ConsiderationDocument4 pages7 - FTIR Analysis of Used Lubricating Oils General ConsiderationJoel CunhaNo ratings yet
- Firefighter II Candidate Handbook - 2 PDFDocument22 pagesFirefighter II Candidate Handbook - 2 PDFf.BNo ratings yet
- 30ra 1sbDocument12 pages30ra 1sbomarcastillogalindoNo ratings yet
- PSNA College Question Bank on Power and IC EnginesDocument7 pagesPSNA College Question Bank on Power and IC EnginesVasundaraNo ratings yet
- Cimac Paper 21Document11 pagesCimac Paper 21ozakyusNo ratings yet
- Pressure Equipment Safety RegulationDocument21 pagesPressure Equipment Safety RegulationmavqcNo ratings yet
- Typical Land Rig: National Oilwell VarcoDocument1 pageTypical Land Rig: National Oilwell VarcoThomas DuNo ratings yet