You might also like
- PID CONTROLLER EXPERIMENTDocument13 pagesPID CONTROLLER EXPERIMENTMohd KhairiNo ratings yet
- Exp 9 Lab IiiDocument12 pagesExp 9 Lab IiiMuhammad AnwarNo ratings yet
- PID ControlDocument32 pagesPID Controlanurag_pai_1No ratings yet
- CH 8Document81 pagesCH 8kfaliNo ratings yet
- Development of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringDocument23 pagesDevelopment of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringHakan AykuluNo ratings yet
- Control EngineeringDocument137 pagesControl EngineeringDuc-Duy Pham NguyenNo ratings yet
- Closed loop temperature controlDocument6 pagesClosed loop temperature controlsjsujiprasadNo ratings yet
- Chapter - 4 Control Configuration 4.1 Pid ControllerDocument8 pagesChapter - 4 Control Configuration 4.1 Pid ControllerMoorthy ManikandanNo ratings yet
- Application Note 83402: PID ControlDocument32 pagesApplication Note 83402: PID Controlmanashbd100% (1)
- Control Manual Lab 8Document12 pagesControl Manual Lab 8Hussain HadiNo ratings yet
- Introduction To PID ControlDocument6 pagesIntroduction To PID ControlIonescu ViorelNo ratings yet
- ChE 5105 Group Experiment on PID Temperature ControlDocument10 pagesChE 5105 Group Experiment on PID Temperature ControlStephanie SomongcadNo ratings yet
- Ipak TrblshootDocument150 pagesIpak TrblshootFrancisco RenteriaNo ratings yet
- PID Controllers Explained: Jacques Smuts, PH.DDocument4 pagesPID Controllers Explained: Jacques Smuts, PH.Djenix105No ratings yet
- Thermal Characteristics of Pid Controller Water HeaterDocument10 pagesThermal Characteristics of Pid Controller Water HeaterEhab QabashNo ratings yet
- PID Controller For Pneumatic Proportional ValveDocument4 pagesPID Controller For Pneumatic Proportional ValveMiko QuijanoNo ratings yet
- Design and applications of fuzzy logic PID controllerDocument19 pagesDesign and applications of fuzzy logic PID controllerPriya BhardwajNo ratings yet
- Pid ExplainedDocument4 pagesPid ExplainedShiva Sai BuraNo ratings yet
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- Smith Predictor Desc enDocument8 pagesSmith Predictor Desc entalljatNo ratings yet
- Manual tm-10098 Rev 05-27-08Document203 pagesManual tm-10098 Rev 05-27-08Alhgasjsghjagjsdajlsd Asdalsdlkaksd100% (1)
- Air Conditioning and Refrigeration PLC Training KitDocument4 pagesAir Conditioning and Refrigeration PLC Training KitSuzaini SupingatNo ratings yet
- Chapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGDocument5 pagesChapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGLakshmiNo ratings yet
- PID ControllerDocument18 pagesPID ControllerCheng Khie Chieh100% (1)
- Kfetrkt: Plant T) Process KeDocument4 pagesKfetrkt: Plant T) Process KeAmogh RNo ratings yet
- EVMS Full Notes PDFDocument78 pagesEVMS Full Notes PDFNaveen DhanurajNo ratings yet
- System DynamicsDocument137 pagesSystem DynamicsFevzi Çakmak BolatNo ratings yet
- PID Theory From WikipediaDocument7 pagesPID Theory From Wikipediaputra-tzuNo ratings yet
- Textbook: Package P3: Kiln - Operation and Optimisation Simulation of Kiln and Cooler OperationDocument5 pagesTextbook: Package P3: Kiln - Operation and Optimisation Simulation of Kiln and Cooler OperationSantanu PachhalNo ratings yet
- Temperature Control LabDocument16 pagesTemperature Control Labhoocheeleong234100% (1)
- Tarea2 Investigacion-Mcca-190090Document13 pagesTarea2 Investigacion-Mcca-190090Christian MendezNo ratings yet
- Process Control Concepts: Understanding Feedback Loops, Variables, and TerminologyDocument39 pagesProcess Control Concepts: Understanding Feedback Loops, Variables, and Terminologykaezzar10100% (1)
- Pid Control TheoryDocument8 pagesPid Control TheorySonu SinghNo ratings yet
- Hvac BMS: HVAC Systems Eng. Ahmed MoustafaDocument126 pagesHvac BMS: HVAC Systems Eng. Ahmed MoustafaBahaa bunniNo ratings yet
- PID Furnace Temp ControlDocument11 pagesPID Furnace Temp ControlashishNo ratings yet
- Unit 3Document11 pagesUnit 3mayuraher9511No ratings yet
- PID ModesTraining LabVoltDocument34 pagesPID ModesTraining LabVoltRiccardo VianelloNo ratings yet
- 21 THDocument32 pages21 THujjwal kumarNo ratings yet
- Bytronic SistemDocument6 pagesBytronic SistemSedat IriçNo ratings yet
- Experiment 8: Temperature Control: 8.1 Objective of The ExperimentDocument11 pagesExperiment 8: Temperature Control: 8.1 Objective of The ExperimentHemavathy RtNo ratings yet
- Exp - P9 - Pressure ControlDocument9 pagesExp - P9 - Pressure ControlPriyanshu LilhaNo ratings yet
- Implementing A PID Controller Using A PICDocument15 pagesImplementing A PID Controller Using A PICJavier CharrezNo ratings yet
- Catálogo FracoDocument42 pagesCatálogo FracoOscar LomasNo ratings yet
- RT Svp02a en PDFDocument80 pagesRT Svp02a en PDFFabian Lopez100% (1)
- ABB PID ControlDocument21 pagesABB PID Controlciocioi iancuNo ratings yet
- Sabroe SMC & TSMC Units Control 2009Document40 pagesSabroe SMC & TSMC Units Control 2009aveselov88No ratings yet
- Contro EngineeringDocument29 pagesContro EngineeringNor AshimyNo ratings yet
- Introduction to ACC 2 System Operation and TroubleshootingDocument33 pagesIntroduction to ACC 2 System Operation and TroubleshootingAndrás TóthNo ratings yet
- PID ControlDocument17 pagesPID ControlUma MageshwariNo ratings yet
- Pid Controller Tuning: S.no Name of The ChapterDocument35 pagesPid Controller Tuning: S.no Name of The ChapterAmit TripathiNo ratings yet
- Unit 3 PLC PDFDocument15 pagesUnit 3 PLC PDFMahesh ShendeNo ratings yet
- PID Controller: From Wikipedia, The Free EncyclopediaDocument17 pagesPID Controller: From Wikipedia, The Free EncyclopediatirupataiahxlNo ratings yet
- Temperature Based Fan Speed ControllerDocument14 pagesTemperature Based Fan Speed ControllerSakthi EzhilNo ratings yet
- APPLICATION GUIDE - PID FunctionDocument43 pagesAPPLICATION GUIDE - PID FunctioniedmondNo ratings yet
- Advanced Temperature Measurement and Control, Second EditionFrom EverandAdvanced Temperature Measurement and Control, Second EditionNo ratings yet
- The PIC Microcontroller: Your Personal Introductory CourseFrom EverandThe PIC Microcontroller: Your Personal Introductory CourseRating: 1 out of 5 stars1/5 (2)
- Introduction To Ethernet IPDocument43 pagesIntroduction To Ethernet IPiedmondNo ratings yet
- Basic Process Control Systems Used For Safety Instrumented FunctionsDocument14 pagesBasic Process Control Systems Used For Safety Instrumented FunctionsLuc SchramNo ratings yet
- DL205 Power Requirements and DimensionsDocument2 pagesDL205 Power Requirements and DimensionsiedmondNo ratings yet
- DL205 Power Requirements and DimensionsDocument2 pagesDL205 Power Requirements and DimensionsiedmondNo ratings yet
- Echochange-Gateway Doku v10 e PDFDocument32 pagesEchochange-Gateway Doku v10 e PDFiedmondNo ratings yet
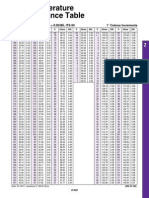
- For European Curve, Alpha 0.00385, ITS-90 1° Celsius IncrementsDocument3 pagesFor European Curve, Alpha 0.00385, ITS-90 1° Celsius IncrementsMary HarrisonNo ratings yet
- OPC Data Manager ManualDocument50 pagesOPC Data Manager ManualiedmondNo ratings yet
- Industrial Internet of Things (IIoT) Impact On The Oil & Gas Industry Value ChainDocument16 pagesIndustrial Internet of Things (IIoT) Impact On The Oil & Gas Industry Value ChainiedmondNo ratings yet
- W03160en - Seat Leakage DetectionDocument4 pagesW03160en - Seat Leakage DetectioniedmondNo ratings yet
- Easy9 - EZ9ET24L Consumer Unit Specification SheetDocument1 pageEasy9 - EZ9ET24L Consumer Unit Specification SheetiedmondNo ratings yet
- Pt100sensoren eDocument4 pagesPt100sensoren eMuhammadRaihanNo ratings yet
- Modular Greenhouse KitDocument2 pagesModular Greenhouse KitiedmondNo ratings yet
- Pt100sensoren eDocument4 pagesPt100sensoren eMuhammadRaihanNo ratings yet
- Halogen FreeDocument8 pagesHalogen FreeMarko IvanečkiNo ratings yet
- Business Traveller Africa BT105-July-2016Document68 pagesBusiness Traveller Africa BT105-July-2016iedmondNo ratings yet
- Basic Process Control Systems Used For Safety Instrumented FunctionsDocument14 pagesBasic Process Control Systems Used For Safety Instrumented FunctionsLuc SchramNo ratings yet
- HART Communication Made EasyDocument2 pagesHART Communication Made EasyiedmondNo ratings yet
- Modulair GreenhouseDocument4 pagesModulair GreenhouseiedmondNo ratings yet
- The Internet of Things: Opportunities & ChallengesDocument17 pagesThe Internet of Things: Opportunities & ChallengesiedmondNo ratings yet
- 1756 Um523 - en PDocument186 pages1756 Um523 - en PMohamed ShebaNo ratings yet
- Migdcs Pp008 en eDocument4 pagesMigdcs Pp008 en eiedmondNo ratings yet
- Modulair GreenhouseDocument4 pagesModulair GreenhouseiedmondNo ratings yet
- Connecting To Allen-BradleyDocument16 pagesConnecting To Allen-Bradleycjutp86No ratings yet
- Conditions Min Typ Max Unit: +1 / 508 295 0771 Usa: +49 / 7731 8399 0 EuropeDocument1 pageConditions Min Typ Max Unit: +1 / 508 295 0771 Usa: +49 / 7731 8399 0 EuropeiedmondNo ratings yet
- American Wire Gauge Conversion ChartDocument2 pagesAmerican Wire Gauge Conversion ChartiedmondNo ratings yet
- Logix Hot Backup SolutionsDocument2 pagesLogix Hot Backup SolutionsiedmondNo ratings yet
- FactoryTalk View ME and PanelView PlusDocument2 pagesFactoryTalk View ME and PanelView PlusiedmondNo ratings yet
- PLC 4Document24 pagesPLC 4iedmondNo ratings yet
- Dasar Dasar PLCDocument65 pagesDasar Dasar PLCAgie FernandezNo ratings yet
- Deep Learning Based Modeling of A Gas Turbine PDFDocument32 pagesDeep Learning Based Modeling of A Gas Turbine PDFsojeeNo ratings yet
- 1 s2.0 S2212827120307162 MainDocument6 pages1 s2.0 S2212827120307162 MainVaisakh DileepkumarNo ratings yet
- Introduction To NeuroinformaticsDocument13 pagesIntroduction To NeuroinformaticsMagedNo ratings yet
- Information Retrieval, Question Answering Systems, and Chatgpt: Technology, Capability, and IntelligenceDocument15 pagesInformation Retrieval, Question Answering Systems, and Chatgpt: Technology, Capability, and IntelligenceGlobal Research and Development ServicesNo ratings yet
- Product Quality Planning (Compatibility Mode)Document12 pagesProduct Quality Planning (Compatibility Mode)Morad LamchachtiNo ratings yet
- Software Development (1) TT PDFDocument13 pagesSoftware Development (1) TT PDFRony GhoshNo ratings yet
- Single-objective Optimization ProblemsDocument18 pagesSingle-objective Optimization Problemskrishna murtiNo ratings yet
- Big-M Method: A Variant of Simplex MethodDocument17 pagesBig-M Method: A Variant of Simplex MethodHuneyn Ali QuadriNo ratings yet
- Ge8077-Total Quality Management Syllabus 2017 Regulation: ObjectiveDocument2 pagesGe8077-Total Quality Management Syllabus 2017 Regulation: ObjectiveDinesh Kumar RNo ratings yet
- EE291E/ME290S Lecture Notes Optimal Control and Dynamic GamesDocument19 pagesEE291E/ME290S Lecture Notes Optimal Control and Dynamic Gamesasanithanair35No ratings yet
- IC301 Control Engineering-IDocument3 pagesIC301 Control Engineering-IAKSHAY KRISHNA K RNo ratings yet
- Chaos in Dynamical Systems (Edward Ott)Document26 pagesChaos in Dynamical Systems (Edward Ott)Hans0% (1)
- Technical PlanDocument2 pagesTechnical Planalodia2437No ratings yet
- Temperature Control Water Bath System Using PID ControllerDocument5 pagesTemperature Control Water Bath System Using PID Controllerprapya pokharelNo ratings yet
- Control Lab Report 1Document11 pagesControl Lab Report 1Waqas IqrarNo ratings yet
- Conventional Software ManagementDocument21 pagesConventional Software ManagementSweeti Sah100% (1)
- Advanced Process Dynamics and Control by Sarkar Prabir Kumar 978 81 203 4993 3 Phi Learning PDFDocument2 pagesAdvanced Process Dynamics and Control by Sarkar Prabir Kumar 978 81 203 4993 3 Phi Learning PDFFranklin Turpo HuallipeNo ratings yet
- 3rd DCC PracticalDocument8 pages3rd DCC PracticalAasavari KhairnarNo ratings yet
- 3.quality Classification of Dragon Fruits Based On External Performance Using A Convolutional Neural NetworkDocument13 pages3.quality Classification of Dragon Fruits Based On External Performance Using A Convolutional Neural NetworkGodGun ControlNo ratings yet
- Honeywell BPR CaseDocument15 pagesHoneywell BPR Casesanjanasingh29100% (1)
- Desain Dan Implementasi Aplikasi PerpustakaanDocument7 pagesDesain Dan Implementasi Aplikasi PerpustakaanMuhamad SyihabNo ratings yet
- Assignment - 1 Techniques For Computer Aided AnalysisDocument1 pageAssignment - 1 Techniques For Computer Aided AnalysisMohamed IbrahimNo ratings yet
- Penggunaan Bahasa Indonesia Pada Media Ruang Publik Di Kota PekanbaruDocument15 pagesPenggunaan Bahasa Indonesia Pada Media Ruang Publik Di Kota PekanbaruRohmi ArdiansahNo ratings yet
- asset-v1-ColumbiaX+CSMM.101x+1T2017+type@asset+block@AI Lecture1 SMDocument68 pagesasset-v1-ColumbiaX+CSMM.101x+1T2017+type@asset+block@AI Lecture1 SMfromthemassesNo ratings yet
- Lyapunov Based Model Reference Adaptive Control of A QuadrotorDocument5 pagesLyapunov Based Model Reference Adaptive Control of A QuadrotorNaod ZerihunNo ratings yet
- Leadership - The Fiedler ModelDocument10 pagesLeadership - The Fiedler ModelLala ZareylNo ratings yet
- Stock Management System DocumentationDocument91 pagesStock Management System DocumentationKhim Alcoy50% (2)
- Module 2 Hebb NetDocument12 pagesModule 2 Hebb NetVighnesh MNo ratings yet
- ERPDocument36 pagesERPDharmendra Thakur100% (1)
- KM Slides Ch03Document33 pagesKM Slides Ch03anon_23984043650% (2)