You might also like
- OMRON To Vijeo CitectDocument6 pagesOMRON To Vijeo CitectArie Dwi CahyonoNo ratings yet
- Temperature Control Using LabviewDocument5 pagesTemperature Control Using LabviewReyyan KhalidNo ratings yet
- Speed of Control of Motor Arduino Matlab Simulation PDFDocument10 pagesSpeed of Control of Motor Arduino Matlab Simulation PDFvince kafuaNo ratings yet
- ANSI/ISA-75.25.01-2000 (R2010) Test Procedure For Control Valve Response Measurement From Step InputsDocument34 pagesANSI/ISA-75.25.01-2000 (R2010) Test Procedure For Control Valve Response Measurement From Step InputsHoras Canman100% (1)
- Industrial Instrumentation 05EE 62XXDocument56 pagesIndustrial Instrumentation 05EE 62XXwhiteelephant93No ratings yet
- Model Gravity Flow TankDocument11 pagesModel Gravity Flow TankTiar_Rahman_9553No ratings yet
- Embedded SystemDocument28 pagesEmbedded SystemDevon Buckley86% (7)
- Kecerdasan Buatan: Artificial IntelligenceDocument30 pagesKecerdasan Buatan: Artificial IntelligenceWahyu HPNo ratings yet
- SCR, Ujt, Triac, DiacDocument30 pagesSCR, Ujt, Triac, DiacGhinsGONo ratings yet
- ASGN Ethernet Loopback DesignDocument4 pagesASGN Ethernet Loopback DesignsenthilNo ratings yet
- Arduino Example - Continuous Sampling Example - Discussion Forums - National InstrumentsDocument3 pagesArduino Example - Continuous Sampling Example - Discussion Forums - National InstrumentsMihai BogdanNo ratings yet
- DSP Lab 7 To 12Document75 pagesDSP Lab 7 To 12Abdul BasitNo ratings yet
- Transfer Function ProsesDocument34 pagesTransfer Function ProsesMalasari NasutionNo ratings yet
- UAS Sistem Kendali 1920 2019 LYDocument1 pageUAS Sistem Kendali 1920 2019 LYUnggulAlfalahNo ratings yet
- Digital Signal ProcessingDocument4 pagesDigital Signal ProcessingRia SalujaNo ratings yet
- Laporan Praktikum Simulasi Robot WirelessDocument26 pagesLaporan Praktikum Simulasi Robot WirelessWifda Rahmatiya Hasna100% (1)
- ATV12 Communication Parameters BBV51917 1.4IE05bDocument12 pagesATV12 Communication Parameters BBV51917 1.4IE05bRicardo Rodriguez ParedesNo ratings yet
- Elektronika Daya Kuliah Ke 1Document50 pagesElektronika Daya Kuliah Ke 1Didi Nurtadi LibraNo ratings yet
- Ai 230 PLCDocument110 pagesAi 230 PLCR.k. VishnoiNo ratings yet
- "Control Systems Engineering": Text Book: Chapter 3 (NN 6 Ed)Document18 pages"Control Systems Engineering": Text Book: Chapter 3 (NN 6 Ed)umair khalilNo ratings yet
- OPC and Real-Time Systems in LabVIEWDocument99 pagesOPC and Real-Time Systems in LabVIEWsmejiagonzalesNo ratings yet
- FOC and DTCDocument69 pagesFOC and DTCRaed MohsenNo ratings yet
- Automatic Braking System in E-BikesDocument14 pagesAutomatic Braking System in E-BikesPranesh.MNo ratings yet
- Signals and SystemsDocument3 pagesSignals and Systemsnisarg0% (1)
- Simulasi Dan Analisis Cycloconverter 3 FasaDocument56 pagesSimulasi Dan Analisis Cycloconverter 3 Fasawahyu febriyantoNo ratings yet
- Appendix A: IEEE 14-Bus Test System DataDocument8 pagesAppendix A: IEEE 14-Bus Test System DataSuterm SeccionNo ratings yet
- Data Sheet PLCDocument1 pageData Sheet PLCRendyAlfNo ratings yet
- 3 The TTL NAND GateDocument7 pages3 The TTL NAND Gateanupamj4u0% (1)
- Pertemuan Ke 13 Akusisi DataDocument117 pagesPertemuan Ke 13 Akusisi DataKautsar KuzaNo ratings yet
- PID Thesis Book PDFDocument58 pagesPID Thesis Book PDFMainul BaikkaNo ratings yet
- Fuzzy Gain Scheduling of PID Controllers PDFDocument7 pagesFuzzy Gain Scheduling of PID Controllers PDFMiguel ZeaNo ratings yet
- Modelling of The Three-Phase Induction Motor Using SIMULINKDocument3 pagesModelling of The Three-Phase Induction Motor Using SIMULINKsajs20175% (4)
- Document 1 WatanabeDocument58 pagesDocument 1 WatanabeHendrik BastiwNo ratings yet
- Practical Data Acquisition For Instrumentation and Control SystemsDocument5 pagesPractical Data Acquisition For Instrumentation and Control SystemsE.C.MADHUDUDHANA REDDY0% (1)
- DSP Project Research PaperDocument4 pagesDSP Project Research PaperHas Nain KhaanNo ratings yet
- System Identification and Estimation in LabVIEWDocument99 pagesSystem Identification and Estimation in LabVIEWDavidleonardo GalindoNo ratings yet
- Mo Phong Matlab Ball and BeamDocument52 pagesMo Phong Matlab Ball and BeamHuong NguyenNo ratings yet
- Q) Explain RAMI 4.0 in Brief With ExampleDocument1 pageQ) Explain RAMI 4.0 in Brief With ExampleShivam JadhavNo ratings yet
- MEE1045 - MECHATRONICS-SYSTEMS-DESIGN - EPJ - 1.0 - 49 - MEE1045 Mechatronics Systems Design PDFDocument2 pagesMEE1045 - MECHATRONICS-SYSTEMS-DESIGN - EPJ - 1.0 - 49 - MEE1045 Mechatronics Systems Design PDFSathish SatNo ratings yet
- Embedded Sys. & Robotics WorkshopDocument5 pagesEmbedded Sys. & Robotics WorkshopPriyanka SharmaNo ratings yet
- MARIE Assembly Language Programming Lab ReportDocument4 pagesMARIE Assembly Language Programming Lab ReportAndre F. YousiffNo ratings yet
- Control Valve - Gain and Transfer FunctionDocument10 pagesControl Valve - Gain and Transfer FunctionMohd Yashfi Yunus100% (2)
- Ansaldo Energia AE94 2 Upgrading Project PDFDocument20 pagesAnsaldo Energia AE94 2 Upgrading Project PDFRaden MasNo ratings yet
- Data Sheet Pompa SentrifugalDocument2 pagesData Sheet Pompa Sentrifugalsiaga 1No ratings yet
- Sliding Mode Control of DC MotorDocument5 pagesSliding Mode Control of DC MotorPham Quoc ThienNo ratings yet
- HX711Document9 pagesHX711framqz100% (1)
- Transportation LagDocument10 pagesTransportation LagImran Unar100% (1)
- Fundamentals of Mechatronics Short CourseDocument3 pagesFundamentals of Mechatronics Short CourseAamir Hasan KhanNo ratings yet
- Single Line SymbolsDocument26 pagesSingle Line SymbolsjoydeepNo ratings yet
- Optimum State Space Control of A BLDC MotorDocument18 pagesOptimum State Space Control of A BLDC Motorauralius0% (1)
- Introduction To Intelligent ControlDocument10 pagesIntroduction To Intelligent ControlDereje ShiferawNo ratings yet
- Torque-Speed Characteristic Induction Motor Plot: M-File MatlabDocument2 pagesTorque-Speed Characteristic Induction Motor Plot: M-File MatlabGiorgio Rendra VilariZ'tNo ratings yet
- PidDocument10 pagesPidElvis YuNo ratings yet
- S2 Bidang Keahlian TSPDocument30 pagesS2 Bidang Keahlian TSPEsa ApriaskarNo ratings yet
- Signals, Spectra Syllabus PDFDocument2 pagesSignals, Spectra Syllabus PDFJeffreyBerida50% (2)
- EE 452 Digital Control SystemsDocument2 pagesEE 452 Digital Control SystemsFiaz KhanNo ratings yet
- Imaro M1 2019Document25 pagesImaro M1 2019Adithya RaoNo ratings yet
- Course Plan and The Evaluation PlanDocument2 pagesCourse Plan and The Evaluation PlanKatari KiranNo ratings yet
- Assignment 3: Mrs. Seema P Diwan Walchand College of EngineeringDocument9 pagesAssignment 3: Mrs. Seema P Diwan Walchand College of EngineeringSeema P DiwanNo ratings yet
- L3500PA Labeler Manual Ed2Rv6Document88 pagesL3500PA Labeler Manual Ed2Rv6Hendra AntomyNo ratings yet
- 3RH21221BB40 Datasheet enDocument7 pages3RH21221BB40 Datasheet enHendra AntomyNo ratings yet
- Pirelli Indonesian Round, 19-21 November 2021: Results Free Practice 3rd SessionDocument2 pagesPirelli Indonesian Round, 19-21 November 2021: Results Free Practice 3rd SessionHendra AntomyNo ratings yet
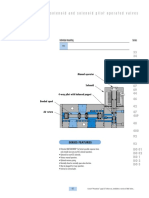
- Series: Direct Solenoid and Solenoid Pilot Operated ValvesDocument8 pagesSeries: Direct Solenoid and Solenoid Pilot Operated ValvesHendra AntomyNo ratings yet
- 6ES71476BG000AB0 Datasheet enDocument3 pages6ES71476BG000AB0 Datasheet enHendra AntomyNo ratings yet
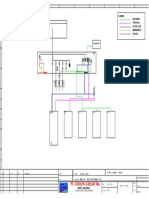
- P.dist and Hierarchy Diagram - Gempol - Mechanical Feeding - Line E04Document1 pageP.dist and Hierarchy Diagram - Gempol - Mechanical Feeding - Line E04Hendra AntomyNo ratings yet
- Series: The Ultra-Small Multi-Code Reader That Can Handle SpeedDocument7 pagesSeries: The Ultra-Small Multi-Code Reader That Can Handle SpeedHendra AntomyNo ratings yet
- Simatic S7-1500/ET 200MP Power Supply Module PS 60W 120/230V AC/DC (6ES7507-0RA00-0AB0)Document23 pagesSimatic S7-1500/ET 200MP Power Supply Module PS 60W 120/230V AC/DC (6ES7507-0RA00-0AB0)Hendra AntomyNo ratings yet
- Silabus Kurikulum TSPDocument41 pagesSilabus Kurikulum TSPHendra AntomyNo ratings yet
- Skma PDCDocument1 pageSkma PDCHendra AntomyNo ratings yet
- DatasheetDocument1 pageDatasheetHendra AntomyNo ratings yet
- 100352-b Controller-BRC User Manual - V3Document71 pages100352-b Controller-BRC User Manual - V3alexfmiNo ratings yet
- Case Study of PID Control in An FPGA PDFDocument18 pagesCase Study of PID Control in An FPGA PDFwigaYeHtetNo ratings yet
- Catalog Echipamente Training Pneumatice Si Hidraulice PDFDocument172 pagesCatalog Echipamente Training Pneumatice Si Hidraulice PDFplacintaruNo ratings yet
- Automatique Industrielle - M2 - Rv02Document28 pagesAutomatique Industrielle - M2 - Rv02Mohamed RouaNo ratings yet
- Implementation of Higher-Order IIR Filter Using 8051 MicrocontrollerDocument9 pagesImplementation of Higher-Order IIR Filter Using 8051 MicrocontrollerVi PowderNo ratings yet
- Final ReportjavDocument35 pagesFinal Reportjavalotte12No ratings yet
- Yalmip A Toolbox For Modeling and Optimization in MATLAB: Efberg Laboratory, CH-8092Document6 pagesYalmip A Toolbox For Modeling and Optimization in MATLAB: Efberg Laboratory, CH-8092BenjaminNo ratings yet
- Mechatronics Course SyllabusDocument17 pagesMechatronics Course Syllabusnikhilrane91_7522800No ratings yet
- Classification of Adaptive Control TechniquesDocument3 pagesClassification of Adaptive Control TechniquesLOKESHWARAN K CHEM-UG- 2017 BATCHNo ratings yet
- Grind Circuit Optimization Using Real-Time Measurement of Individual Hydrocyclone Overflow Stream Particle Size Enabled by Novel CYCLONEtrac TechnologyDocument18 pagesGrind Circuit Optimization Using Real-Time Measurement of Individual Hydrocyclone Overflow Stream Particle Size Enabled by Novel CYCLONEtrac TechnologySusan McCulloughNo ratings yet
- Auto Clutch ControlDocument55 pagesAuto Clutch ControlsenthilmhNo ratings yet
- Short Staple Spinning DrawframeDocument61 pagesShort Staple Spinning DrawframeBharani MurugesanNo ratings yet
- Linear Control System Analysis and DesignDocument1 pageLinear Control System Analysis and DesignFaisal MahmoodNo ratings yet
- Difference Between DCS and PLCDocument2 pagesDifference Between DCS and PLCmtrj59No ratings yet
- Design of Internal Model Control Based Fractional Order PID Controller PDFDocument6 pagesDesign of Internal Model Control Based Fractional Order PID Controller PDFHolly GardnerNo ratings yet
- Chapter 11Document46 pagesChapter 11ninoska217608No ratings yet
- On The Enhanced ADRC Design With A Low Observer BandwidthDocument6 pagesOn The Enhanced ADRC Design With A Low Observer BandwidthIt's PedrowNo ratings yet
- DC Micro Grid For Wind and Solar Power Integration: A Project ReportDocument58 pagesDC Micro Grid For Wind and Solar Power Integration: A Project ReportVinayaga ProjectinstituteNo ratings yet
- Comparison Study of Mamdani Method and Sugeno Method in The Navigation System For Indoor Mobile RobotDocument4 pagesComparison Study of Mamdani Method and Sugeno Method in The Navigation System For Indoor Mobile RobotijsretNo ratings yet
- Dynamic Modeling of Variable Speed Centrifugal Pump Utilizing MATLAB / SIMULINKDocument7 pagesDynamic Modeling of Variable Speed Centrifugal Pump Utilizing MATLAB / SIMULINKricardoNo ratings yet
- Inversor Baummer PDFDocument254 pagesInversor Baummer PDFLuiz Mauro XavierNo ratings yet
- FYP PosterDocument1 pageFYP PosterahmadmzakNo ratings yet
- Filters: Umeraanjum - M.TechDocument22 pagesFilters: Umeraanjum - M.TechUmera AnjumNo ratings yet
- SSP 402 Dynamic Steering in The Audi A4 '08Document32 pagesSSP 402 Dynamic Steering in The Audi A4 '08francois.garcia31100% (2)
- Re30042 11.02Document6 pagesRe30042 11.02thierrylindoNo ratings yet
- Syllabus For Introduction To RoboticsDocument2 pagesSyllabus For Introduction To RoboticszbielakNo ratings yet
- Optimal Fuzzy Self-Tuning of PI Controller Using Genetic Algorithm For Induction Motor Speed ControlDocument2 pagesOptimal Fuzzy Self-Tuning of PI Controller Using Genetic Algorithm For Induction Motor Speed ControlSALEM234No ratings yet