You might also like
- Cap.4-Flexão PuraDocument44 pagesCap.4-Flexão Puraeder_machado_5100% (2)
- Mecanica Dos SolidosDocument390 pagesMecanica Dos Solidosbacuri1400100% (1)
- Teoria Sobre Parafuso de PotênciaDocument8 pagesTeoria Sobre Parafuso de PotênciaLeonardo SantosNo ratings yet
- MEC SOLIDOS 2 e 3 Da UnB PDFDocument239 pagesMEC SOLIDOS 2 e 3 Da UnB PDFpaulogud6170No ratings yet
- ESTRUTURAL Memorial Descritivo - Ginasio Bela Vista PDFDocument4 pagesESTRUTURAL Memorial Descritivo - Ginasio Bela Vista PDFKarolina SilvaNo ratings yet
- TreliçasDocument51 pagesTreliçasJean Carlo Pigosso CoelhoNo ratings yet
- Apostila Mecanica Dos Sólidos Mecanica Das Estruturas ARQ V2010Document100 pagesApostila Mecanica Dos Sólidos Mecanica Das Estruturas ARQ V2010julialmeidandrade100% (2)
- Cálculo de MonoviasDocument4 pagesCálculo de MonoviasJonatas PrandiniNo ratings yet
- Apostila de Análise Estrutural I - Vigas Isostáticas - Parte 1Document7 pagesApostila de Análise Estrutural I - Vigas Isostáticas - Parte 1CaykeLuisNo ratings yet
- Aulas 1 e 2 Introdução Ao Projeto e Cálculo de Estruturas Metálicas 5Document32 pagesAulas 1 e 2 Introdução Ao Projeto e Cálculo de Estruturas Metálicas 5Anonymous JJbrn9zebNo ratings yet
- Apostila-Resistência Dos MateriaisDocument60 pagesApostila-Resistência Dos Materiaisinox110100% (3)
- Q - Questoes Deformacoes Na Flexao - CompacDocument10 pagesQ - Questoes Deformacoes Na Flexao - CompacJorlando0% (1)
- Viga Cálculo DetalhamentoDocument77 pagesViga Cálculo DetalhamentoClaudemir CiceroNo ratings yet
- Critérios para Projetos de Reservatórios Elevados de Concreto Armado PDFDocument149 pagesCritérios para Projetos de Reservatórios Elevados de Concreto Armado PDFbela_medeiros-1No ratings yet
- Tabela de Momento de Inércia de PerfisDocument4 pagesTabela de Momento de Inércia de PerfisDelberThomaz100% (1)
- Aula Aço - Dimensionamento de PilaresDocument42 pagesAula Aço - Dimensionamento de PilaresaugustopippiNo ratings yet
- Dimensionamento de Estruturas MetálicasDocument85 pagesDimensionamento de Estruturas MetálicasFenix2010No ratings yet
- 6 TreliçasDocument51 pages6 TreliçascarolbrockNo ratings yet
- Lista de Exercicios de CisalhamentoDocument3 pagesLista de Exercicios de CisalhamentoVinícius Timm BonowNo ratings yet
- Lista de Torção - Resistência Dos MateriaisDocument7 pagesLista de Torção - Resistência Dos MateriaisFelipe BatistaNo ratings yet
- Exemplos de Dimensionamento de Lajes PDFDocument19 pagesExemplos de Dimensionamento de Lajes PDFCamila BrasilNo ratings yet
- Cálculo de ChumbadoresDocument1 pageCálculo de ChumbadoresAnamaria Hosken RoelensNo ratings yet
- Fundacoes Rasas Blocos e Sapatas 1Document48 pagesFundacoes Rasas Blocos e Sapatas 1Vanessa S. SantosNo ratings yet
- Resolução-Teste MMIDocument6 pagesResolução-Teste MMICasimiro PintoNo ratings yet
- Livros de Resistencia Dos MateriaisDocument4 pagesLivros de Resistencia Dos MateriaisClaudioLimaMatos100% (1)
- TRELIÇADocument28 pagesTRELIÇAMarcus MiguelNo ratings yet
- Planilha de Dimensionamento Pilar MetálicoDocument11 pagesPlanilha de Dimensionamento Pilar MetálicoFlávio Santos75% (4)
- 3 Lista de ExercíciosDocument4 pages3 Lista de Exercíciosderson18No ratings yet
- Cálculo de VigasDocument5 pagesCálculo de VigasHolmes RipollNo ratings yet
- Análise Por Elementos Finitos Pelo ANSYSDocument64 pagesAnálise Por Elementos Finitos Pelo ANSYSGuilherme MedeirosNo ratings yet
- Estática Hibbeler 10ed Problema2 38 ResoluçãoDocument3 pagesEstática Hibbeler 10ed Problema2 38 ResoluçãoMLalli5340No ratings yet
- 03 - ConsolosDocument26 pages03 - Consolosjulianodemarche100% (1)
- Teoria de PlacasDocument32 pagesTeoria de PlacasMiriam Cristina CamachoNo ratings yet
- Pontes em concreto armado: Análise e dimensionamentoFrom EverandPontes em concreto armado: Análise e dimensionamentoNo ratings yet
- Análise Modal Operacional: a metodologia de análise de vibrações estruturais aplicada em um píerFrom EverandAnálise Modal Operacional: a metodologia de análise de vibrações estruturais aplicada em um píerNo ratings yet
- 5-Flexão Simples-Tensão Cisalhamento PDFDocument17 pages5-Flexão Simples-Tensão Cisalhamento PDFKenjjiNo ratings yet
- Aula 14 Parametrizações de Algumas Curvas PDFDocument12 pagesAula 14 Parametrizações de Algumas Curvas PDFÁtila DamascenoNo ratings yet
- Aula 01 - Momento Estático - CentróideDocument6 pagesAula 01 - Momento Estático - CentróideAnderson RodriguesNo ratings yet
- @propriedades Das Seções Transversais PDFDocument1 page@propriedades Das Seções Transversais PDFLucas VieiraNo ratings yet
- Manual Traçado 2Document50 pagesManual Traçado 2Donizeti ToledoNo ratings yet
- Percolação de Água No SoloDocument45 pagesPercolação de Água No SoloDéboraRibeiroNo ratings yet
- Manual Traçado de Caldeiraria JJTudoDocument49 pagesManual Traçado de Caldeiraria JJTudoEnio Ferreira100% (5)
- Manual de Traçado v-IIDocument51 pagesManual de Traçado v-IIMarcos100% (1)
- Geometria No Espaço (Construção)Document11 pagesGeometria No Espaço (Construção)JonhNo ratings yet
- Modulo 6 CalorDocument14 pagesModulo 6 CalorGustavo HenriqueNo ratings yet
- Coletanea TrigonometriaDocument9 pagesColetanea TrigonometriaAna GonçalvesNo ratings yet
- Percolação de Água No SoloDocument45 pagesPercolação de Água No SoloDéboraRibeiroNo ratings yet
- Carga DistribuídaDocument5 pagesCarga DistribuídaMarcelo Kayser de CamposNo ratings yet
- Propriedades AstDocument2 pagesPropriedades AstsmctpirassunungaNo ratings yet
- 9º Ano - TrigonometriaDocument34 pages9º Ano - TrigonometriaPedro ValentimNo ratings yet
- Lançamento Oblíquo: IntroduçãoDocument8 pagesLançamento Oblíquo: IntroduçãoRick TavaresNo ratings yet
- Lançamento Oblíquo: IntroduçãoDocument8 pagesLançamento Oblíquo: Introduçãocarv999nayNo ratings yet
- Resumo Geometria AnaliticaDocument9 pagesResumo Geometria AnaliticaPra JeleNo ratings yet
- Momentos de InérciaDocument9 pagesMomentos de Inérciaciv08145No ratings yet
- Seções Cônicas - Complemento Da Aula PDFDocument13 pagesSeções Cônicas - Complemento Da Aula PDFLUCAS ANTONIO LOPES NEVESNo ratings yet
- Pecas EscritasDocument18 pagesPecas Escritasciv08145No ratings yet
- A2001 - AbacoDocument1 pageA2001 - AbacoLeonardoNo ratings yet
- Separata Pilar Pilar-Parede Det R0Document11 pagesSeparata Pilar Pilar-Parede Det R0civ08145No ratings yet
- Pecas EscritasDocument9 pagesPecas Escritasciv08145No ratings yet
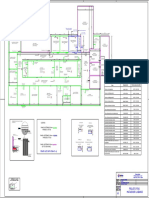
- Layout Matadouro ModelDocument1 pageLayout Matadouro Modelciv08145No ratings yet
- 5 EstabilidadeDocument6 pages5 Estabilidadeciv08145No ratings yet
- Eurocódigo 1 - 1 NPEN001991-1-1 - 2009Document47 pagesEurocódigo 1 - 1 NPEN001991-1-1 - 2009Fulvio GilNo ratings yet
- CALCULO MEZANINO AÇO 299 - Artigo - Ed83Document5 pagesCALCULO MEZANINO AÇO 299 - Artigo - Ed83MILTONPSNo ratings yet
- Robot-Notas Calc PredimDocument14 pagesRobot-Notas Calc Predimciv08145No ratings yet
- Apresentação Eurocódigos Estruturais PDFDocument56 pagesApresentação Eurocódigos Estruturais PDFGilmar Oliveira100% (1)
- Manual LSF Engenharia 2016 PDFDocument226 pagesManual LSF Engenharia 2016 PDFJoao Paulo100% (3)
- Apostila de Cálculo Numérico (Parte Um) Equações Não LinearesDocument10 pagesApostila de Cálculo Numérico (Parte Um) Equações Não Linearesciv08145No ratings yet
- Oscilações (Parte Um)Document4 pagesOscilações (Parte Um)civ08145No ratings yet
- An Lise Tensorial ADocument3 pagesAn Lise Tensorial Aciv08145No ratings yet
- Momentos de InérciaDocument9 pagesMomentos de Inérciaciv08145No ratings yet
- Momentos de InérciaDocument9 pagesMomentos de Inérciaciv08145No ratings yet
- Momentos de InérciaDocument9 pagesMomentos de Inérciaciv08145No ratings yet
- DESIDRATACAO DE ALCOOL - Vander Santos DabarraDocument23 pagesDESIDRATACAO DE ALCOOL - Vander Santos DabarraAparecido RodriguesNo ratings yet
- P1-5-Analise GranulometricaDocument41 pagesP1-5-Analise GranulometricaCristiano Manuel da Costa100% (1)
- C - Corte PuroDocument8 pagesC - Corte PuroReginaldo G SoaresNo ratings yet
- Prova UNICAMP 2020 Física ComentadaDocument23 pagesProva UNICAMP 2020 Física ComentadaMarceleNo ratings yet
- 8800 - Estrutura de AçoDocument10 pages8800 - Estrutura de AçoCipriano NetoNo ratings yet
- Curso 12168 Aula 10 v1Document80 pagesCurso 12168 Aula 10 v1Gerson GersonNo ratings yet
- MODULO 1 - Introducao Ao Comportamento Das EstruturasDocument28 pagesMODULO 1 - Introducao Ao Comportamento Das EstruturasInacio Mauricio TomasNo ratings yet
- Propriedades Dos Produtos SidérurgicosDocument2 pagesPropriedades Dos Produtos SidérurgicossilasbcarNo ratings yet
- Data Sheet Loctite 620Document3 pagesData Sheet Loctite 620Reginaldo AlvesNo ratings yet
- Física Quântica e Espiritualidade - Aula 1Document11 pagesFísica Quântica e Espiritualidade - Aula 1Roberto Brandão Vargas Júnior100% (1)
- Abnt CB 02 NBR 14323 PDFDocument75 pagesAbnt CB 02 NBR 14323 PDFWilliamNo ratings yet
- 1.1. Física - Teoria - Livro 1 PDFDocument48 pages1.1. Física - Teoria - Livro 1 PDFDiogo LevesNo ratings yet
- Manual Caldera Ariston Genus One UsuarioDocument28 pagesManual Caldera Ariston Genus One UsuarioJosu ENo ratings yet
- Estrutura Cubica de Face Centrada NiODocument105 pagesEstrutura Cubica de Face Centrada NiOGuilherme EstevesNo ratings yet
- Tratores John DereDocument4 pagesTratores John DereVITOR GABRIEL100% (1)
- Magnetismo TerceiroDocument3 pagesMagnetismo TerceiroÉder MartinsNo ratings yet
- NBR 14643-2001-Corrosao-Atmosferica-Classificacaodacorrosividadedeatmosferas PDFDocument12 pagesNBR 14643-2001-Corrosao-Atmosferica-Classificacaodacorrosividadedeatmosferas PDFAna Cristina dos Santos CarvalhoNo ratings yet
- Ficha 2 - Extensão Das ReaçõesDocument3 pagesFicha 2 - Extensão Das ReaçõesRafael TeixeiraNo ratings yet
- Resumo - Microscopia ÓticaDocument2 pagesResumo - Microscopia ÓticaGabriel PortoNo ratings yet
- Física Geral e Experimental: MecânicaDocument12 pagesFísica Geral e Experimental: MecânicaRodrigo_Miguel_CENo ratings yet
- Edil Química Orgânica Unidade 1 - Teoria EstruturalDocument132 pagesEdil Química Orgânica Unidade 1 - Teoria Estruturalleticia trindadeNo ratings yet
- Recuperação de Física Do 3º Ano. 1º Bi.Document3 pagesRecuperação de Física Do 3º Ano. 1º Bi.ceciliamunizNo ratings yet
- Física Quântica e EspiritualidadeDocument12 pagesFísica Quântica e EspiritualidadeRoberto Brandão Vargas JúniorNo ratings yet
- EAOEARDocument2 pagesEAOEARFigueredo ConcurseiroNo ratings yet
- Ficha Tecnica Celenit Abe pdf1504866627Document3 pagesFicha Tecnica Celenit Abe pdf1504866627armindoNo ratings yet
- Prova60 MecanicaDocument7 pagesProva60 MecanicaMauricioss2313 SoaresNo ratings yet
- Resmat 1Document26 pagesResmat 1jose salgueiro100% (2)
- Apostila Mecanica Dos Solos IIDocument122 pagesApostila Mecanica Dos Solos IIRaiane100% (1)
- N 0115Document125 pagesN 0115sabrunoNo ratings yet
- NBR 12952Document6 pagesNBR 12952Daniel Barni HulbertNo ratings yet