You might also like
- STRUKTUR BAJA GIRDERDocument9 pagesSTRUKTUR BAJA GIRDERMuhamad MadaniNo ratings yet
- REKAYASA GEMPA SDOFDocument28 pagesREKAYASA GEMPA SDOFJesica SuyantoNo ratings yet
- Sturktur Baja 2Document41 pagesSturktur Baja 2Muhammad Arif IkrimahNo ratings yet
- Pembebanan JembatanDocument37 pagesPembebanan JembatanMiftah Riza100% (1)
- Metode Analisis StrukturDocument9 pagesMetode Analisis StrukturRaniMegaYantiNo ratings yet
- v01 Modul 07 - MDOF Dan Cara Kekakuan PDFDocument17 pagesv01 Modul 07 - MDOF Dan Cara Kekakuan PDFDamar FarhadivaNo ratings yet
- Laporan Baja IIDocument57 pagesLaporan Baja IIagung tikNo ratings yet
- Pemodelan StrukturDocument12 pagesPemodelan StrukturAnonymous NPJyEpVSNo ratings yet
- 01 Pengenalan Dinamika StrukturDocument16 pages01 Pengenalan Dinamika StrukturTony Ong50% (2)
- Tugas Dinamika Struktur Dan Rekayasa GempaDocument11 pagesTugas Dinamika Struktur Dan Rekayasa GempameibookNo ratings yet
- JALAN REL STRUKTURDocument9 pagesJALAN REL STRUKTURHerawati Liwangka100% (1)
- Perhitungan Daya Dukung Pondasi Bored Pile Menggunakan Metode MayerhoffDocument6 pagesPerhitungan Daya Dukung Pondasi Bored Pile Menggunakan Metode MayerhoffJojon JohnNo ratings yet
- Bab V - Irregularitas Dan RedudansiDocument13 pagesBab V - Irregularitas Dan RedudansiLia WahyuningtyasNo ratings yet
- Materi CrossDocument21 pagesMateri Crossdimas wahyuNo ratings yet
- DESAIN GORDINGDocument19 pagesDESAIN GORDINGVen AbenNo ratings yet
- Slab Lantai JembatanDocument44 pagesSlab Lantai JembatanandikaNo ratings yet
- Soal Tugas Besar Analisa Struktur III 2019-2020Document1 pageSoal Tugas Besar Analisa Struktur III 2019-2020Anna EmiliawatiNo ratings yet
- Laporan Tugas Besar SI 4211Document108 pagesLaporan Tugas Besar SI 4211Andi WinarsoNo ratings yet
- Balok TinggiDocument4 pagesBalok TinggiNicoHS89100% (1)
- Rekayasa Jembatan Baja: Kelompok 2 Muhammad Aldi (1904101010109) Ichsan Qibriel H (1904101010063)Document16 pagesRekayasa Jembatan Baja: Kelompok 2 Muhammad Aldi (1904101010109) Ichsan Qibriel H (1904101010063)Ichsan QibrielNo ratings yet
- RumahSusunDocument22 pagesRumahSusunF DzulfikarNo ratings yet
- Diskusi Dinamika Struktur Dan Rekayasa GempaDocument21 pagesDiskusi Dinamika Struktur Dan Rekayasa GempaIwan SutrionoNo ratings yet
- Analisis Balok dan Portal dengan Metode Slope DeflectionDocument1 pageAnalisis Balok dan Portal dengan Metode Slope DeflectiondickiNo ratings yet
- Rekayasa GempaDocument18 pagesRekayasa GempaFitriansyah Adi Putra IrwanNo ratings yet
- TB-Beton-2-Lantai-Analisa-StrukturDocument10 pagesTB-Beton-2-Lantai-Analisa-StrukturMelki Rid'One ManurungNo ratings yet
- EVALUASI DAN REHABILITASI JEMBATANDocument39 pagesEVALUASI DAN REHABILITASI JEMBATANAl KindiNo ratings yet
- ANALISA STRUKTURDocument5 pagesANALISA STRUKTURAlhamdi AldhiNo ratings yet
- Perencanaan Kuda-Kuda Rangka BajaDocument72 pagesPerencanaan Kuda-Kuda Rangka Bajahesti1405No ratings yet
- Pelat DDMDocument14 pagesPelat DDMramsiNo ratings yet
- KONSOL PENDEK - Kelompok 5 - 2KBG2Document33 pagesKONSOL PENDEK - Kelompok 5 - 2KBG2Ramzy MadridistaNo ratings yet
- DDM Metode Perencanaan LangsungDocument63 pagesDDM Metode Perencanaan LangsungMuhammad Fitradika FernadyNo ratings yet
- PelabuhanDocument40 pagesPelabuhanEra RizkyNo ratings yet
- Tugas 2 Struktur Baja 2Document10 pagesTugas 2 Struktur Baja 2Egi SantosoNo ratings yet
- Bab-2-LRFD - Revisi OkeDocument11 pagesBab-2-LRFD - Revisi OkeNurlita Dewi UtamiNo ratings yet
- Contoh Soal MDOF PDFDocument6 pagesContoh Soal MDOF PDFMuhammadFhadilNo ratings yet
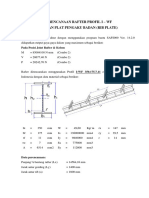
- RAFTER PROFIL IDocument13 pagesRAFTER PROFIL IAhmadFaishalTsaqibNo ratings yet
- Garis PengaruhDocument64 pagesGaris PengaruhNelson Panjaitan0% (1)
- Daftar SimbolDocument6 pagesDaftar SimbolHipmi STARupNo ratings yet
- Dinamika StrukturDocument5 pagesDinamika StrukturFerisma RatugiriNo ratings yet
- Tinjauan Pustaka PondasiDocument15 pagesTinjauan Pustaka Pondasisuherman_mojoNo ratings yet
- 05.3 Bab 3 (Pedestal) PDFDocument57 pages05.3 Bab 3 (Pedestal) PDFNunu NugrahaNo ratings yet
- Struktur Portal BidangDocument13 pagesStruktur Portal Bidangodywahyu100% (1)
- BAB 12 Kolom BiaksialDocument15 pagesBAB 12 Kolom BiaksialIndra WahyuNo ratings yet
- Soal Dan Jawaban-1 SBB Ganjil 2019 PDFDocument28 pagesSoal Dan Jawaban-1 SBB Ganjil 2019 PDFAdhyasta Ida BagusNo ratings yet
- Perhitungan T-Girder Beton BertulangDocument10 pagesPerhitungan T-Girder Beton BertulangHernanda ManaluNo ratings yet
- Nadhila Faraswati R - D111 15 311 - Teknik Sipil Unhas - Matematika Terapan C - Tugas 2Document15 pagesNadhila Faraswati R - D111 15 311 - Teknik Sipil Unhas - Matematika Terapan C - Tugas 2Nadhila FaraswatiNo ratings yet
- Lentur Geser TorsiDocument57 pagesLentur Geser TorsiMuhammad NaquibNo ratings yet
- Desain Jembatan Balok T (8-10)Document19 pagesDesain Jembatan Balok T (8-10)PaijoNo ratings yet
- BalokDocument2 pagesBalokMukti ArifinNo ratings yet
- ANALISIS STRUKTURDocument16 pagesANALISIS STRUKTURgilbert novensiusNo ratings yet
- f5 Struktur Baja II (F5-Nonkompak, Langsing)Document10 pagesf5 Struktur Baja II (F5-Nonkompak, Langsing)muhammad aliNo ratings yet
- Metode AMplopDocument25 pagesMetode AMplopRahmad SulistyawanNo ratings yet
- Dinamika Strukture: Teori & Perhitungan / Mario Paz Penerjemah Manu A.PDocument1 pageDinamika Strukture: Teori & Perhitungan / Mario Paz Penerjemah Manu A.PAdi Surya DharmaNo ratings yet
- DESIGN JEMBATANDocument32 pagesDESIGN JEMBATANGatelgagatel GatelNo ratings yet
- Matriks KekakuanDocument25 pagesMatriks KekakuanAnnisaa DinaNo ratings yet
- Bella Safitri TambunanDocument37 pagesBella Safitri TambunanAji KaNo ratings yet
- ANALISIS DINAMIKA STRUKTURDocument40 pagesANALISIS DINAMIKA STRUKTUREngky WrgNo ratings yet
- Makalah Sistem Satu Derajad KebebasanDocument36 pagesMakalah Sistem Satu Derajad KebebasanDaniel Fransisco SilalahiNo ratings yet
- TKS62121 DinamikaDocument81 pagesTKS62121 DinamikaanggaNo ratings yet
- SDOFDocument13 pagesSDOFdimas wahyuNo ratings yet
- Rumus Pearson Product Moment CorrelationDocument2 pagesRumus Pearson Product Moment Correlationweda91No ratings yet
- Tugas 1 Plat Dan CangkangDocument16 pagesTugas 1 Plat Dan Cangkangweda91No ratings yet
- Pertemuan 15 S.D 18: Garis PengaruhDocument32 pagesPertemuan 15 S.D 18: Garis Pengaruhweda91No ratings yet
- Analisa Faktor Tunggu KapalDocument115 pagesAnalisa Faktor Tunggu KapalDhik Pamungkas100% (3)
- KIMIA DASARDocument32 pagesKIMIA DASARweda91No ratings yet
- Menghitung Kimia DasarDocument25 pagesMenghitung Kimia Dasarweda91No ratings yet
- 15508015-Rakhman SantosoDocument10 pages15508015-Rakhman SantosoFebefebeNo ratings yet
- Rab Rumah SederhanaDocument3 pagesRab Rumah SederhanaDhana ScifferNo ratings yet
- Bendung Karet 2002Document0 pagesBendung Karet 2002Rezky Ardiandi PutraNo ratings yet
- Soal Dan Pembahasan Kalkulus Matematika Lanjut Schaum Vektor Integral Garis Integral Permukaan Dan Teori IntegralDocument25 pagesSoal Dan Pembahasan Kalkulus Matematika Lanjut Schaum Vektor Integral Garis Integral Permukaan Dan Teori IntegralIntan KertiyaniNo ratings yet
- Analisa Struktur IVDocument11 pagesAnalisa Struktur IVweda91No ratings yet
- S028443718Document32 pagesS028443718Lutfi LailaNo ratings yet
- Metode Numerik (TM1)Document23 pagesMetode Numerik (TM1)weda91No ratings yet
- Istilah Lapangan TerbangDocument10 pagesIstilah Lapangan Terbangweda91No ratings yet
- 03.12.0037 Roy Klayert + 03.12.0050 SumarwonoDocument88 pages03.12.0037 Roy Klayert + 03.12.0050 SumarwonoHerman AtusNo ratings yet
- 003 5 3 WDocument10 pages003 5 3 WHerman AtusNo ratings yet