You might also like
- 3 Line ConverterDocument10 pages3 Line ConverterJay Romar PabianiaNo ratings yet
- Design Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsDocument12 pagesDesign Calculations For Buck-Boost Converters: Michael Green Advanced Low Power SolutionsnandhakumarmeNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- All Classroom Class ExamplesDocument51 pagesAll Classroom Class ExamplesAhmed Sabri0% (1)
- Power Systems - I Question BankDocument78 pagesPower Systems - I Question BankSuparna DebNo ratings yet
- Generation of High Voltage DC Using Diodes & Capacitors in Ladder NetworkDocument6 pagesGeneration of High Voltage DC Using Diodes & Capacitors in Ladder NetworkEditor IJRITCCNo ratings yet
- NPTEL - Curso de Proteção de SistemasDocument321 pagesNPTEL - Curso de Proteção de SistemasGianey Fernandes da SilvaNo ratings yet
- Assignmnet 02 RevisedDocument3 pagesAssignmnet 02 RevisedBilal Ayub100% (1)
- CH4 2Document55 pagesCH4 2Imran AbdullahNo ratings yet
- How To Size Current TransformersDocument3 pagesHow To Size Current TransformersVasu IyerNo ratings yet
- CBPSD-lab Manual PDFDocument40 pagesCBPSD-lab Manual PDFShiv Rajput80% (10)
- Topology Investigation For Front End DC-DC Power Conversion For Distributed Power SystemDocument332 pagesTopology Investigation For Front End DC-DC Power Conversion For Distributed Power Systemwouter81100% (4)
- Load Flow Matrices IIT Roorkee Notes NPTELDocument88 pagesLoad Flow Matrices IIT Roorkee Notes NPTELconsultrail100% (1)
- Exp 8 Buck ConverterDocument7 pagesExp 8 Buck Converterusmpowerlab50% (2)
- Utilization of Electrical Energy: CHAPTER 4: Electric Traction L-4-3Document21 pagesUtilization of Electrical Energy: CHAPTER 4: Electric Traction L-4-3Frozen BoyNo ratings yet
- What Are The Advantages and Disadvantages of A Bi-Directional DC To A DC Converter?Document14 pagesWhat Are The Advantages and Disadvantages of A Bi-Directional DC To A DC Converter?BALAJINo ratings yet
- Instrument Transformers TutorialDocument5 pagesInstrument Transformers TutorialEzeldeen AgoryNo ratings yet
- AC Network Theorems: Prepared By: Karthik Chandran Pillai IV Sem, EEE (B)Document22 pagesAC Network Theorems: Prepared By: Karthik Chandran Pillai IV Sem, EEE (B)hodeegits9526100% (1)
- Electromagnetic Relay Static Relay Numerical Relay: Single Input Comparator Dual Input Comparator Multi Input ComparatorDocument34 pagesElectromagnetic Relay Static Relay Numerical Relay: Single Input Comparator Dual Input Comparator Multi Input ComparatorSathiyarajNo ratings yet
- Boost DesignDocument4 pagesBoost DesignmuthukumartharaniNo ratings yet
- Double Frequency Buck ConverterDocument68 pagesDouble Frequency Buck ConverterSanthosh GuduruNo ratings yet
- Buck Converter Using ArduinoDocument12 pagesBuck Converter Using ArduinoaaqibNo ratings yet
- Electri Circuits Lab Manual 1Document11 pagesElectri Circuits Lab Manual 1Sri RoNo ratings yet
- Loadf Flow Studies Using Gauss SiedelDocument6 pagesLoadf Flow Studies Using Gauss SiedeldurgendraNo ratings yet
- Improvement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodDocument5 pagesImprovement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodRavishankar KankaleNo ratings yet
- Chapter 2Document15 pagesChapter 2Abd Alkader Alwer100% (1)
- Assignment 04 Power ElectronicsDocument3 pagesAssignment 04 Power ElectronicsTayyab Hussain0% (1)
- AC DC DrivesDocument13 pagesAC DC Drives322399mk7086No ratings yet
- TEE3211 DrivesDocument126 pagesTEE3211 DrivesWebster Fungirai100% (1)
- Solid State Drives Short BookDocument48 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- Three Phase ControlledDocument9 pagesThree Phase ControlledSaif HassanNo ratings yet
- Lab ReportDocument15 pagesLab Reportaeoliano0% (1)
- Arduino SPWM Sine InverterDocument5 pagesArduino SPWM Sine InvertermaurilioctbaNo ratings yet
- EMT 369 Wk2 Power Semiconductor Devices (GC)Document53 pagesEMT 369 Wk2 Power Semiconductor Devices (GC)Ashraf YusofNo ratings yet
- DC - Ac Inv.Document82 pagesDC - Ac Inv.Jegadeeswari GNo ratings yet
- Publication 1 19208 6043Document13 pagesPublication 1 19208 6043Stephen Velasco Villaruz0% (1)
- Unsymmetrical Fault AnalysisDocument49 pagesUnsymmetrical Fault AnalysisabdulbabulNo ratings yet
- Emf Equation of AlternatorDocument2 pagesEmf Equation of AlternatorThe Engineers EDGE, CoimbatoreNo ratings yet
- Asynchronous and Synchronous Machines (EL-208) (IV SEM EL Session 2017-18) Tutorial Sheet 1 (Dated 08.01.2018) (3 Phase Induction MotorsDocument10 pagesAsynchronous and Synchronous Machines (EL-208) (IV SEM EL Session 2017-18) Tutorial Sheet 1 (Dated 08.01.2018) (3 Phase Induction MotorsKushagra BhatiaNo ratings yet
- L4 Boost Converter Analysis and DesignDocument13 pagesL4 Boost Converter Analysis and DesignKarthickNo ratings yet
- CH 2 NotesDocument24 pagesCH 2 NotesJahangeer SoomroNo ratings yet
- Lab 3 AM POC Fall19Document8 pagesLab 3 AM POC Fall19Hassan Ul HaqNo ratings yet
- PSP TutorialDocument16 pagesPSP TutorialMatthew WongNo ratings yet
- 12V To 120V DC - DC Converter Using Power Electronics For Higher Efficiency and Reliable OperationDocument23 pages12V To 120V DC - DC Converter Using Power Electronics For Higher Efficiency and Reliable OperationRaghav ChawlaNo ratings yet
- Unit6 Resonance Circuit (VTU)Document23 pagesUnit6 Resonance Circuit (VTU)fanah_13100% (1)
- Motivation Letter For StudentsDocument1 pageMotivation Letter For Studentsnesru aliyiNo ratings yet
- Articol - Dewan - Rectifier Filter Design PDFDocument7 pagesArticol - Dewan - Rectifier Filter Design PDFCovaci BogdanNo ratings yet
- Ee 328 Lecture 11Document55 pagesEe 328 Lecture 11somethingfornowNo ratings yet
- Sepic Converter Based DC Motor Speed ControlDocument18 pagesSepic Converter Based DC Motor Speed ControlCrispNo ratings yet
- Slides For Multi Level Inverter in Psim PDFDocument41 pagesSlides For Multi Level Inverter in Psim PDFmuhammad saeedNo ratings yet
- Control of HVDC Transmission System Based On MMCDocument22 pagesControl of HVDC Transmission System Based On MMCAnand Parakkat ParambilNo ratings yet
- Upptcl Intern PDFDocument24 pagesUpptcl Intern PDFnischaljain07No ratings yet
- Sect2-3 PDFDocument10 pagesSect2-3 PDFBlaiseNo ratings yet
- 8051 Basic & InterfacingDocument42 pages8051 Basic & Interfacingapi-19951707No ratings yet
- Study of 8086Document27 pagesStudy of 8086api-19951707No ratings yet
- 8BIT ADD - Ex2Document1 page8BIT ADD - Ex2api-19951707No ratings yet
- Stepper MotorDocument1 pageStepper Motorapi-19951707No ratings yet
- Serial CommunicationDocument4 pagesSerial Communicationapi-19951707No ratings yet
- Dr. Mahalingam College of Engineering and Technology Pollachi - 642003Document5 pagesDr. Mahalingam College of Engineering and Technology Pollachi - 642003api-19951707No ratings yet
- 8086 InterfacingDocument6 pages8086 Interfacingapi-19951707100% (1)
- Study of 8086Document27 pagesStudy of 8086api-19951707No ratings yet
- MSC Lab Manual-MpDocument49 pagesMSC Lab Manual-Mpapi-19951707No ratings yet
- Study of 8086Document27 pagesStudy of 8086api-19951707No ratings yet
- 8051 BasicsDocument29 pages8051 Basicsapi-1995170783% (6)
- Lesson 8 Hard and Soft Switching of Power SemiconductorsDocument12 pagesLesson 8 Hard and Soft Switching of Power SemiconductorsChacko MathewNo ratings yet
- MANUALDocument12 pagesMANUALapi-19951707No ratings yet
- MP Lab ManualDocument36 pagesMP Lab Manualapi-19951707No ratings yet
- L11 Single Phase Half Controlled Bridge ConverterDocument19 pagesL11 Single Phase Half Controlled Bridge Converterapi-19951707No ratings yet
- 8051 BasicsDocument29 pages8051 Basicsapi-1995170783% (6)
- 8085 StudyDocument5 pages8085 Studyapi-19951707No ratings yet
- L13 Three Phase Fully Controlled Bridge ConverterDocument29 pagesL13 Three Phase Fully Controlled Bridge Converterapi-19951707No ratings yet
- L15 Effect of Source Inductance On The Performance of AC To DC ConvertersDocument12 pagesL15 Effect of Source Inductance On The Performance of AC To DC Convertersapi-19951707No ratings yet
- MSC Lab Manual-MpDocument49 pagesMSC Lab Manual-Mpapi-19951707No ratings yet
- L10 Single Phase Fully Controlled RectifierDocument26 pagesL10 Single Phase Fully Controlled Rectifierapi-1995170750% (2)
- L-9 (DK) (Pe) ( (Ee) Nptel)Document36 pagesL-9 (DK) (Pe) ( (Ee) Nptel)Htet AungNo ratings yet
- L12 Single Phase Uncontrolled RectifierDocument22 pagesL12 Single Phase Uncontrolled Rectifierapi-19951707100% (1)
- 8051 Basic & InterfacingDocument42 pages8051 Basic & Interfacingapi-19951707No ratings yet
- Lesson 7 Insulated Gate Bipolar Transistor (IGBT)Document23 pagesLesson 7 Insulated Gate Bipolar Transistor (IGBT)Chacko MathewNo ratings yet
- Lesson 6 Metal Oxide Semiconductor Field Effect Transistor (MOSFET)Document30 pagesLesson 6 Metal Oxide Semiconductor Field Effect Transistor (MOSFET)Chacko MathewNo ratings yet
- Lesson 5 Gate Turn Off Thyristor (GTO)Document23 pagesLesson 5 Gate Turn Off Thyristor (GTO)Chacko Mathew100% (1)
- Lesson 3 Power Bipolar Junction Transistor (BJT)Document45 pagesLesson 3 Power Bipolar Junction Transistor (BJT)Chacko MathewNo ratings yet
- Lesson 4 Thyristors and TriacsDocument39 pagesLesson 4 Thyristors and TriacsChacko Mathew100% (1)
- Log and Antilog TableDocument3 pagesLog and Antilog TableDeboshri BhattacharjeeNo ratings yet
- LC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Document2 pagesLC For Akij Biax Films Limited: CO2012102 0 December 22, 2020Mahadi Hassan ShemulNo ratings yet
- CE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Document6 pagesCE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Angelice Alliah De la CruzNo ratings yet
- KK AggarwalDocument412 pagesKK AggarwalEnrico Miguel AquinoNo ratings yet
- ME-6501Computer Aided Design (CAD) WITH QB - BY Civildatas - Com 1Document85 pagesME-6501Computer Aided Design (CAD) WITH QB - BY Civildatas - Com 1Nathar ShaNo ratings yet
- Logistic RegressionDocument7 pagesLogistic RegressionShashank JainNo ratings yet
- 2014 - Intelligence As A Predictor of Outcome in Short-And Long-Term PsychotherapyDocument9 pages2014 - Intelligence As A Predictor of Outcome in Short-And Long-Term PsychotherapyZayne CarrickNo ratings yet
- Eccentric FootingDocument3 pagesEccentric FootingVarunn VelNo ratings yet
- PDFDocument653 pagesPDFconstantinNo ratings yet
- Acoustic Glass - ENDocument2 pagesAcoustic Glass - ENpeterandreaNo ratings yet
- Leveriza Heights SubdivisionDocument4 pagesLeveriza Heights SubdivisionTabordan AlmaeNo ratings yet
- Hard DiskDocument9 pagesHard DiskAmarnath SahNo ratings yet
- Atoma Amd Mol&Us CCTK) : 2Nd ErmDocument4 pagesAtoma Amd Mol&Us CCTK) : 2Nd ErmjanviNo ratings yet
- Construction Project - Life Cycle PhasesDocument4 pagesConstruction Project - Life Cycle Phasesaymanmomani2111No ratings yet
- Abnt NBR 16868 1 Alvenaria Estrutural ProjetoDocument77 pagesAbnt NBR 16868 1 Alvenaria Estrutural ProjetoGIOVANNI BRUNO COELHO DE PAULANo ratings yet
- Cause Analysis For Spun Pile Crack and BrokenDocument11 pagesCause Analysis For Spun Pile Crack and BrokenRony LesbtNo ratings yet
- Point and Figure ChartsDocument5 pagesPoint and Figure ChartsShakti ShivaNo ratings yet
- 7 - Monte-Carlo-Simulation With XL STAT - English GuidelineDocument8 pages7 - Monte-Carlo-Simulation With XL STAT - English GuidelineGauravShelkeNo ratings yet
- Work Energy Power SlidesDocument36 pagesWork Energy Power Slidessweehian844100% (1)
- Understanding The Contribution of HRM Bundles For Employee Outcomes Across The Life-SpanDocument15 pagesUnderstanding The Contribution of HRM Bundles For Employee Outcomes Across The Life-SpanPhuong NgoNo ratings yet
- A Project Report ON Strategic Purchasing Procedure, Systems and Policies (Hospital Industry)Document20 pagesA Project Report ON Strategic Purchasing Procedure, Systems and Policies (Hospital Industry)amitwin1983No ratings yet
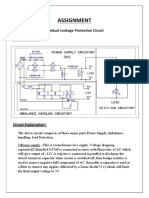
- Assignment: Residual Leakage Protection Circuit Circuit DiagramDocument2 pagesAssignment: Residual Leakage Protection Circuit Circuit DiagramShivam ShrivastavaNo ratings yet
- Diverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesDocument2 pagesDiverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesleonNo ratings yet
- Trucks Part NumbersDocument51 pagesTrucks Part NumbersBadia MudhishNo ratings yet
- Calculating Free Energies Using Adaptive Biasing Force MethodDocument14 pagesCalculating Free Energies Using Adaptive Biasing Force MethodAmin SagarNo ratings yet
- Superlab Manual PDFDocument76 pagesSuperlab Manual PDFGabriela Soares100% (1)
- Engineering Ethics in Practice ShorterDocument79 pagesEngineering Ethics in Practice ShorterPrashanta NaikNo ratings yet
- Names of Planner(s) : Style of Experience: (Whole Class, Small Group, Etc.) Lab: KindergartenDocument4 pagesNames of Planner(s) : Style of Experience: (Whole Class, Small Group, Etc.) Lab: Kindergartenapi-428128701No ratings yet
- Etag 002 PT 2 PDFDocument13 pagesEtag 002 PT 2 PDFRui RibeiroNo ratings yet
- 4. Nguyễn Thị Minh Khai, Sóc TrăngDocument15 pages4. Nguyễn Thị Minh Khai, Sóc TrăngK60 TRẦN MINH QUANGNo ratings yet