You might also like
- Lecture 3 Power Screws 1Document30 pagesLecture 3 Power Screws 1Abdelrahman yasser ZaghloulNo ratings yet
- Power ScrewDocument37 pagesPower ScrewShikhar Saurav100% (1)
- Design of GearsDocument62 pagesDesign of Gearsصبا رياض فتاح الرفاعيNo ratings yet
- Power Screws Fasteners and Rivted Joints Mech 2011Document12 pagesPower Screws Fasteners and Rivted Joints Mech 2011Eslam Mohamed SayedNo ratings yet
- MC Design 2Document71 pagesMC Design 2Upayan Ghatak100% (1)
- Me-331 Design of Machine Elements Unit Iv Design of Basic ElementsDocument25 pagesMe-331 Design of Machine Elements Unit Iv Design of Basic ElementsMuthuvel MNo ratings yet
- Powerscrew 171027153434Document36 pagesPowerscrew 171027153434abdullahNo ratings yet
- Design of Transmission System Unit IIIDocument57 pagesDesign of Transmission System Unit IIIRaj MohanNo ratings yet
- Power ScrewDocument21 pagesPower Screwstruc-engNo ratings yet
- Power ScrewsDocument45 pagesPower Screwsmuhammad hamzaNo ratings yet
- Torsion Civil EngineeringDocument43 pagesTorsion Civil Engineeringhaseebtkhan100% (1)
- 02-Chapter 08-Fasteners (A)Document21 pages02-Chapter 08-Fasteners (A)Muhammad UmarNo ratings yet
- SPRING AND SCREW DESIGNDocument4 pagesSPRING AND SCREW DESIGNG. Somasekhar SomuNo ratings yet
- Design1 SheetsDocument9 pagesDesign1 SheetsYou channelNo ratings yet
- Power - Screw (Compatibility Mode)Document37 pagesPower - Screw (Compatibility Mode)Satyajit RoyNo ratings yet
- Mod-3B-Helical GearDocument2 pagesMod-3B-Helical GearSharthak GhoshNo ratings yet
- Shaft Types and DesignDocument10 pagesShaft Types and Designसुमित शर्माNo ratings yet
- Shaft Keys Couplings Extra Lecture PDFDocument16 pagesShaft Keys Couplings Extra Lecture PDFHardik ParmarNo ratings yet
- FALLSEM2020-21 MEE3001 TH VL2020210101665 Reference Material I 22-Oct-2020 Module 6 Couplings New 12Document40 pagesFALLSEM2020-21 MEE3001 TH VL2020210101665 Reference Material I 22-Oct-2020 Module 6 Couplings New 12AK PRODUCTIONSNo ratings yet
- Assignment 2Document3 pagesAssignment 2sonawanepmsNo ratings yet
- 2 Flat PulleyDocument11 pages2 Flat PulleyHasan AshariNo ratings yet
- Power Screw Uses and TypesDocument45 pagesPower Screw Uses and Typessbkulk100% (1)
- Threaded (Or Single-Start) Screw and If A Second Thread Is Cut in The Space BetweenDocument21 pagesThreaded (Or Single-Start) Screw and If A Second Thread Is Cut in The Space Betweenbiruk tolossaNo ratings yet
- Screws, Fasteners, and Nonpermanent Joint DesignDocument5 pagesScrews, Fasteners, and Nonpermanent Joint DesignMohamed AshrafNo ratings yet
- The Open University of Sri Lanka: DMX4306 - Design of Machine Elements Assignment # 2Document6 pagesThe Open University of Sri Lanka: DMX4306 - Design of Machine Elements Assignment # 2Dilshan0% (1)
- Chapter 2-Coupling and ClutchesDocument40 pagesChapter 2-Coupling and Clutcheskibromgidey12No ratings yet
- Introduction to Power Screws and Welded JointsDocument23 pagesIntroduction to Power Screws and Welded JointssathiaNo ratings yet
- Involute Gear ProfileDocument8 pagesInvolute Gear ProfiledressfeetNo ratings yet
- Lecture - 24-25 - Flat Belt PulleysDocument19 pagesLecture - 24-25 - Flat Belt PulleysM.Abdullah Riaz100% (1)
- Couplings Online 2Document9 pagesCouplings Online 2Abdul Rasheed GhaziNo ratings yet
- Lecture 4Document27 pagesLecture 4nofal AdreesNo ratings yet
- Unit III - TorsionDocument41 pagesUnit III - TorsionMonesh kumarNo ratings yet
- Mechanical Springs GuideDocument33 pagesMechanical Springs GuideAhmedOMNo ratings yet
- Lecture 3 TorsionDocument24 pagesLecture 3 TorsionJacob BaltazarNo ratings yet
- 13 ME AssignmentDocument2 pages13 ME AssignmentMuhammad Sharif JamaliNo ratings yet
- Lecture 6 - Torsion - 2015Document38 pagesLecture 6 - Torsion - 2015imranjamiNo ratings yet
- Unit 7 Shafts: StructureDocument23 pagesUnit 7 Shafts: StructureSabareesan SubramanianNo ratings yet
- Me III II DMM II LnotesDocument33 pagesMe III II DMM II LnotesChandu MallamNo ratings yet
- Important Questions Unit 1,2Document7 pagesImportant Questions Unit 1,2rajeswariNo ratings yet
- 6 Shafts PDFDocument23 pages6 Shafts PDFViven SharmaNo ratings yet
- Chain Drive Selection and DesignDocument14 pagesChain Drive Selection and DesignParth KumbhareNo ratings yet
- Experimental Investigation On Torsional Rigidity of Power ScrewsDocument4 pagesExperimental Investigation On Torsional Rigidity of Power ScrewsIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Unit - IVDocument4 pagesUnit - IVsathiaNo ratings yet
- 1 Screw Rivet WeldDocument26 pages1 Screw Rivet WeldWajih RaziUddin100% (1)
- Threads Design in SolidWorksDocument12 pagesThreads Design in SolidWorksRicky TerryNo ratings yet
- University of Southern Philippines Foundation. College of Engineering and ArchitectureDocument7 pagesUniversity of Southern Philippines Foundation. College of Engineering and ArchitectureJason OwiaNo ratings yet
- torsionDocument26 pagestorsionkidowapoNo ratings yet
- Screw - Design of Screws, Fasteners and PowerDocument39 pagesScrew - Design of Screws, Fasteners and PowerAljen MojeNo ratings yet
- TRANSMISI RANTI DRIVE KOMPRESORDocument34 pagesTRANSMISI RANTI DRIVE KOMPRESORWahyu Purwo RaharjoNo ratings yet
- QB Unit-3,4,5Document7 pagesQB Unit-3,4,5Agranshu BhardwajNo ratings yet
- Chapter 3 Strength Calculation of JointsDocument76 pagesChapter 3 Strength Calculation of Jointsrobel metikuNo ratings yet
- Machine Design & Drawing - II - GEARSDocument12 pagesMachine Design & Drawing - II - GEARSSenthil KumarNo ratings yet
- GEARDocument21 pagesGEARraidahNo ratings yet
- Efficient Gear Drive DesignDocument9 pagesEfficient Gear Drive DesignMaggy IrunguNo ratings yet
- Parametric Modelling of Straight Bevel Gearing System and Analyze The Forces and Stresses by Analytical ApproachDocument5 pagesParametric Modelling of Straight Bevel Gearing System and Analyze The Forces and Stresses by Analytical ApproachseventhsensegroupNo ratings yet
- Design and Fabrication of Motorized Screw JackDocument8 pagesDesign and Fabrication of Motorized Screw Jackvarma100% (1)
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- Hydro Electric Power PlantDocument46 pagesHydro Electric Power Plantsam0415No ratings yet
- Machine Design UET, Taxila Lecture: Uncertainty, DesignDocument37 pagesMachine Design UET, Taxila Lecture: Uncertainty, Designsam0415100% (1)
- Machine Design Lec3Document75 pagesMachine Design Lec3sam0415No ratings yet
- Presentation General DesignDocument52 pagesPresentation General Designsam0415No ratings yet
- The Shell and Shell Scripting: Echo $SHELL - To See The Working Shell in SSHDocument12 pagesThe Shell and Shell Scripting: Echo $SHELL - To See The Working Shell in SSHThai PhuongNo ratings yet
- Fuel Pressure Regulator - Remove and InstallDocument3 pagesFuel Pressure Regulator - Remove and InstallGerardo VelazquezNo ratings yet
- Process VariableDocument51 pagesProcess VariableLance HernandezNo ratings yet
- Important Alloy CompositionDocument2 pagesImportant Alloy CompositionRSLNo ratings yet
- Cam DynamicsDocument8 pagesCam DynamicsRitik PatelNo ratings yet
- Ups Installation and Maintenance ManualDocument141 pagesUps Installation and Maintenance ManualMuntasir100% (1)
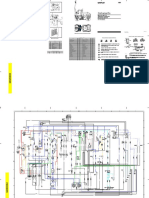
- Electric Schematic CB113 114 QENR2003 PDFDocument2 pagesElectric Schematic CB113 114 QENR2003 PDFHipac TapicuNo ratings yet
- Basic Driving Instructor CourseDocument9 pagesBasic Driving Instructor CourseRafael AbdullaNo ratings yet
- Instruction Manual - Digital Drybath - ENDocument19 pagesInstruction Manual - Digital Drybath - ENAlain ManceraNo ratings yet
- Continental Commercial Vehicle Load TablesDocument6 pagesContinental Commercial Vehicle Load TablesPatricio FNo ratings yet
- U2000 Oss NmsDocument27 pagesU2000 Oss Nmschandan100% (1)
- Iec61000 4 7 (Ed2.0) en - DDocument8 pagesIec61000 4 7 (Ed2.0) en - Dtwinvbooks100% (1)
- LG Power Supply Reference GuideDocument29 pagesLG Power Supply Reference GuideOrlando Jose PascuaNo ratings yet
- Philips Flat TV 15PF9936 - LeafletDocument2 pagesPhilips Flat TV 15PF9936 - LeafletVlad FlorescuNo ratings yet
- Galvanic CorrosionDocument35 pagesGalvanic CorrosionSyarief NahdiNo ratings yet
- Va80 PDFDocument4 pagesVa80 PDFomar leonNo ratings yet
- Two-Way Floor SystemDocument11 pagesTwo-Way Floor SystemJason TanNo ratings yet
- Design and Safety Handbook 3001.5Document51 pagesDesign and Safety Handbook 3001.5phankhoa83No ratings yet
- Revue Des Études Juives. 1880. Volumes 71-73.Document706 pagesRevue Des Études Juives. 1880. Volumes 71-73.Patrologia Latina, Graeca et OrientalisNo ratings yet
- Plate Girder DesignDocument109 pagesPlate Girder Designhasib100% (3)
- Details of Measurement: Total Qnty Nos. Length Breadth Height SN Description of Item Unit MEASUREMENT (In MTRS)Document6 pagesDetails of Measurement: Total Qnty Nos. Length Breadth Height SN Description of Item Unit MEASUREMENT (In MTRS)Biswajit SahooNo ratings yet
- Productdatasheet en or 088423855cDocument1 pageProductdatasheet en or 088423855cpieroNo ratings yet
- Temperature Sensors LM35Document92 pagesTemperature Sensors LM35Shaik Shahul0% (1)
- NFPA 20 Pump CharactaristicsDocument1 pageNFPA 20 Pump Charactaristicsmohammad awedNo ratings yet
- Racecar Engineering 2013 05 PDFDocument100 pagesRacecar Engineering 2013 05 PDFfreddyonnimiNo ratings yet
- Astm B633-23 - Redline Astm B633-23Document7 pagesAstm B633-23 - Redline Astm B633-23somashekar1510No ratings yet
- Sourav Roy - Loan IQ AnalystDocument4 pagesSourav Roy - Loan IQ AnalystSourav RoyNo ratings yet
- PHD Thesis BentzDocument320 pagesPHD Thesis Bentzcrusanu50% (2)
- Extension To Existing Production Building Industrial Slab: Method StatementDocument8 pagesExtension To Existing Production Building Industrial Slab: Method StatementSirb PetruNo ratings yet
- JeppView - LGSA (7 Charts)Document18 pagesJeppView - LGSA (7 Charts)Roshan UppalNo ratings yet