You might also like
- Alat-Alat Ukur Elektronik Dan DigitalDocument32 pagesAlat-Alat Ukur Elektronik Dan DigitalDedi GalihNo ratings yet
- Pengertian Tegangan DCDocument7 pagesPengertian Tegangan DCKakha Mirza Upa OrvalaNo ratings yet
- Ciri Dan Karakteristik SensorDocument12 pagesCiri Dan Karakteristik SensorfadillahNo ratings yet
- Laporan PhotodiodaDocument6 pagesLaporan PhotodiodaAsih100% (1)
- Laporan - Pemakaian OsiloskopDocument10 pagesLaporan - Pemakaian OsiloskopHeryadi KusumahNo ratings yet
- Praktikum NTCDocument6 pagesPraktikum NTCYuni Ima AirenNo ratings yet
- Laporan METAL OXIDE FIELD EFFECT TRANSISTORDocument9 pagesLaporan METAL OXIDE FIELD EFFECT TRANSISTORRagil WibowoNo ratings yet
- Sensor Suhu Dioda SilikonDocument7 pagesSensor Suhu Dioda SilikonSyahrul MunirNo ratings yet
- Penuntun AulDocument21 pagesPenuntun AulPrincess SabaNo ratings yet
- Karakteristik Statis Dan-1Document2 pagesKarakteristik Statis Dan-1Ali FikriNo ratings yet
- Teori Superposisi Ini Hanya Berlaku Untuk Rangkaian Yang Bersifat LinierDocument4 pagesTeori Superposisi Ini Hanya Berlaku Untuk Rangkaian Yang Bersifat LinierOkky GatiNo ratings yet
- Training Step MotorDocument36 pagesTraining Step MotoragusNo ratings yet
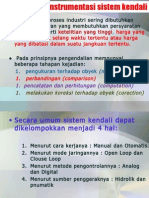
- 2.instrumentasi Sistem KendaliDocument15 pages2.instrumentasi Sistem KendaliMuhammad Taufik100% (1)
- Termometer InfraredDocument2 pagesTermometer InfraredMuhammad Jaka DewantaraNo ratings yet
- Osiloskop AnalogDocument5 pagesOsiloskop AnalogRahmad Al-itNo ratings yet
- JJ1 Pengukuran AVOmeter Dan OsiloskopDocument33 pagesJJ1 Pengukuran AVOmeter Dan Osiloskopagoes nurbillahNo ratings yet
- Jembatan Arus Searah Dan Bolak-BalikDocument31 pagesJembatan Arus Searah Dan Bolak-BalikDendo Firdaus100% (3)
- Pengukuran ListrikDocument19 pagesPengukuran ListrikFebri DalimuntheNo ratings yet
- Proposal Difraksi Fraunhofer Dengan Laser HeneDocument14 pagesProposal Difraksi Fraunhofer Dengan Laser HeneViolita Riyanda SafitriNo ratings yet
- Laporan Praktik Sensor 1Document44 pagesLaporan Praktik Sensor 1Rizqi Santria MulkiNo ratings yet
- Laporan TermokopelDocument18 pagesLaporan TermokopelYan Anggata PutraNo ratings yet
- Karakteristik Dan Kalibrasi Sensor Suhu (LM35)Document22 pagesKarakteristik Dan Kalibrasi Sensor Suhu (LM35)Irviana T RamadhaniNo ratings yet
- Makalah Instrumen ListrikDocument36 pagesMakalah Instrumen ListrikAbdul Hamid Assidiqi100% (1)
- Laporan Praktikum 4 (Osiloskop)Document12 pagesLaporan Praktikum 4 (Osiloskop)Johan WahyudiNo ratings yet
- BAB V Mekanika KuantumDocument8 pagesBAB V Mekanika KuantumJamie KellerNo ratings yet
- Makalah Dioda PINDocument4 pagesMakalah Dioda PINMusa PrayogaNo ratings yet
- Makalah Freq CounterDocument5 pagesMakalah Freq CounterDhani Wahyuningtias Hafsha100% (1)
- Jurnal OsiloskopDocument8 pagesJurnal OsiloskopCahya100% (1)
- Laporan RLCDocument4 pagesLaporan RLCVitriany EkasariNo ratings yet
- Jurnal Karakteristik SensorDocument12 pagesJurnal Karakteristik SensorIwet JanevaNo ratings yet
- Laporan Praktikum Fisika Modern: Percobaan GM (Geiger Muller)Document10 pagesLaporan Praktikum Fisika Modern: Percobaan GM (Geiger Muller)Nuril Nurhadi100% (1)
- NTC PTCDocument11 pagesNTC PTCAprilia MaharaniNo ratings yet
- Metode Pengukuran Daya Secara LangsungDocument5 pagesMetode Pengukuran Daya Secara LangsungBintangNo ratings yet
- Osiloskop Dan Generator SinyalDocument47 pagesOsiloskop Dan Generator SinyalMuhammad Firzy AdhaNo ratings yet
- Rancang Bangun Detektor Logam Dan Kadarnya Menggunakan Sensor Proximity Berbasis Arduino NanoDocument35 pagesRancang Bangun Detektor Logam Dan Kadarnya Menggunakan Sensor Proximity Berbasis Arduino NanoMawar DinurNo ratings yet
- MATERI ISI TermokopelDocument11 pagesMATERI ISI Termokopelabelio.sihite94No ratings yet
- Induktansi DiriDocument25 pagesInduktansi DiriyaniherlianiNo ratings yet
- Modul Instrumentasi IndustriDocument13 pagesModul Instrumentasi Industri20028 Sima Hariara NainggolanNo ratings yet
- Analisis Transformator Tipe Step Up Dan Step DownDocument3 pagesAnalisis Transformator Tipe Step Up Dan Step DownROCHMAT HANAFI SULISTYAWANNo ratings yet
- Fisika InstrumentasiDocument108 pagesFisika InstrumentasiFajar Aprianto100% (1)
- Laproran Akhir Karakteristik Transistor EmitterditanahkanDocument40 pagesLaproran Akhir Karakteristik Transistor EmitterditanahkanWildan NurrahmanNo ratings yet
- Laporan Pengikut Zener Kelompok 4Document17 pagesLaporan Pengikut Zener Kelompok 4Lisdayanti0% (1)
- Sensitivitas GalvanometerDocument9 pagesSensitivitas GalvanometerYogi AuliaNo ratings yet
- OsiloskopDocument28 pagesOsiloskopMUHAMMAD ASNAN HABIBNo ratings yet
- Sensor Cahaya Dan Transistor NPN Serta Aplikasinya Dalam Teknologi OtomatisasiDocument23 pagesSensor Cahaya Dan Transistor NPN Serta Aplikasinya Dalam Teknologi OtomatisasiYusuf SigitNo ratings yet
- Laporan 4 Transistor PNP NPNDocument6 pagesLaporan 4 Transistor PNP NPNNur Hudatu MunawarohNo ratings yet
- Tegangan Effective (RMS), Peak Dan Peak-To-Peak: Elektronika Analog (5tema) Dosen: MujahidinDocument7 pagesTegangan Effective (RMS), Peak Dan Peak-To-Peak: Elektronika Analog (5tema) Dosen: MujahidinNoel Rikki ApryantoNo ratings yet
- Analisa Percobaan KalorimeterDocument2 pagesAnalisa Percobaan KalorimeterSyukron KhamzawiNo ratings yet
- ThermistorDocument15 pagesThermistorFirman Wahyu NugrohoNo ratings yet
- Sistem Kontrol Open Loop Dan Close Loop 1Document2 pagesSistem Kontrol Open Loop Dan Close Loop 1yongky_andre_jocom17No ratings yet
- LAPORAN Percobaan Rangkaian Sensor Suhu Lm35Document13 pagesLAPORAN Percobaan Rangkaian Sensor Suhu Lm35Muammar Riski100% (1)
- Makalah Alat Ukur Dan PengukuranDocument23 pagesMakalah Alat Ukur Dan Pengukuranintan50% (4)
- Au 2016 Buku Alat Ukur - WordDocument94 pagesAu 2016 Buku Alat Ukur - WordMAROSYANA AYU FEBRIANINo ratings yet
- Makalah Pengaruh Kalibrasi Terhadap Keakuratan Alat UkurDocument24 pagesMakalah Pengaruh Kalibrasi Terhadap Keakuratan Alat Ukurfahmi Aziz MNo ratings yet
- Karakteristik Kerja Alat Ukur (Edit)Document4 pagesKarakteristik Kerja Alat Ukur (Edit)Alifum TheMonkeysNo ratings yet
- Toaz - Info Karakteristik Pengukuran PRDocument8 pagesToaz - Info Karakteristik Pengukuran PRMeysa DwiNo ratings yet
- Konsep Dasar PengukuranDocument14 pagesKonsep Dasar PengukuranOka Pngiinn Sendri AjahhNo ratings yet
- Laporan Metrologi Industri Pengukuran Dengan Alat Ukur LinierDocument27 pagesLaporan Metrologi Industri Pengukuran Dengan Alat Ukur LinierDwilaksono LaksonoNo ratings yet
- MetroDocument57 pagesMetroDwiki Ananda PutraNo ratings yet
- Berdagang dengan bollinger bands menjadi mudah: Cara mempelajari cara menggunakan Bollinger Bands untuk berdagang online dengan suksesFrom EverandBerdagang dengan bollinger bands menjadi mudah: Cara mempelajari cara menggunakan Bollinger Bands untuk berdagang online dengan suksesNo ratings yet
- Company Profile Pt. Putra SiliwangiDocument19 pagesCompany Profile Pt. Putra Siliwangidedikartiwa_dkNo ratings yet
- SDS - Aluflex - Marine - Protective - Indonesian (Id) - IndoneDocument6 pagesSDS - Aluflex - Marine - Protective - Indonesian (Id) - Indonededikartiwa_dkNo ratings yet
- Painting Trail by SEIV Paint Mfg. ReportDocument3 pagesPainting Trail by SEIV Paint Mfg. Reportdedikartiwa_dkNo ratings yet
- 092 - Penawaran .April - RTDocument1 page092 - Penawaran .April - RTdedikartiwa_dkNo ratings yet
- Training Welder Welding (Rev.0-Dedi)Document91 pagesTraining Welder Welding (Rev.0-Dedi)dedikartiwa_dk100% (1)