You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Tips Cemerlang Addmath SPMDocument105 pagesTips Cemerlang Addmath SPMmiraaziz100% (10)
- Rineer Hydraulics Inc, Specifications PDFDocument2 pagesRineer Hydraulics Inc, Specifications PDFTulio Andres CoyNo ratings yet
- DH-65-65L S2 Instruction Manual - Eng v04.2 (2017.11.20) PDFDocument167 pagesDH-65-65L S2 Instruction Manual - Eng v04.2 (2017.11.20) PDFlotaphatech67% (6)
- Listening Vocabulary Cambridge 10 To 18Document90 pagesListening Vocabulary Cambridge 10 To 18Emon Rahman100% (1)
- Defetcs in CeramicsDocument11 pagesDefetcs in CeramicsRaza AliNo ratings yet
- BOSH D1 FinalDocument189 pagesBOSH D1 Finaljoe GregNo ratings yet
- CBSE Class 9 Physics Worksheet - GravitationDocument2 pagesCBSE Class 9 Physics Worksheet - GravitationSuyash JaiswalNo ratings yet
- Science Academy Shrigonda - Physics Class 12 - Thermodynamics Final PrintsDocument23 pagesScience Academy Shrigonda - Physics Class 12 - Thermodynamics Final PrintsShriram AndhareNo ratings yet
- Improved Stopband Performance in Ceramic Waveguide Filters Using Step Impedance and Step Width ResonatorsDocument3 pagesImproved Stopband Performance in Ceramic Waveguide Filters Using Step Impedance and Step Width ResonatorsWaleed SethiNo ratings yet
- Breakdown Price: JasaDocument2 pagesBreakdown Price: JasaWahyu AdjiNo ratings yet
- BCC M324-0000-10-003-VX44T2-050 Ordercode: BCC059Y: Single-Ended CordsetsDocument2 pagesBCC M324-0000-10-003-VX44T2-050 Ordercode: BCC059Y: Single-Ended Cordsetsarnal18No ratings yet
- Universe Formation and Birth of StarDocument3 pagesUniverse Formation and Birth of StarcollegeschoolfilesmjNo ratings yet
- (PHYSB) TH02 KinematicsDocument23 pages(PHYSB) TH02 KinematicsJazz EsquejoNo ratings yet
- SUNHEARRT FULLBODY 60x60cm - 60x120cmDocument29 pagesSUNHEARRT FULLBODY 60x60cm - 60x120cmHitesh VishnuNo ratings yet
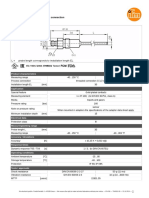
- Temperature Sensor With Process Connection: L Probe Length Corresponds To Installation Length ELDocument2 pagesTemperature Sensor With Process Connection: L Probe Length Corresponds To Installation Length ELImad YahyaNo ratings yet
- GATE EE/ECCapacitorDocument9 pagesGATE EE/ECCapacitornarendra mauryaNo ratings yet
- CH 25 P Table Folens'1Document22 pagesCH 25 P Table Folens'1Sean BradyNo ratings yet
- Casting Machine Edit22Document26 pagesCasting Machine Edit22Wienda NooraisyahNo ratings yet
- User Manual: Color Doppler Ultrasound SystemDocument139 pagesUser Manual: Color Doppler Ultrasound SystemBilal AloulouNo ratings yet
- United States Patent (10) Patent No.: US 8,209,912 B2Document14 pagesUnited States Patent (10) Patent No.: US 8,209,912 B2pmurphNo ratings yet
- Material Selection and Design For Delivery Drone PropellersDocument6 pagesMaterial Selection and Design For Delivery Drone PropellersRicardo DíazNo ratings yet
- NTH Order Differential Equations On eDocument2 pagesNTH Order Differential Equations On esoumyadip paikNo ratings yet
- Trinity Amelung CS-190 - Service ManualDocument233 pagesTrinity Amelung CS-190 - Service ManualluisNo ratings yet
- Evaluation of Adhesive Anchors in Concrete Under Sustained Loading ConditionsDocument18 pagesEvaluation of Adhesive Anchors in Concrete Under Sustained Loading ConditionsWaleed AhmedNo ratings yet
- Pullout Strength Models For FRP AnchorsDocument9 pagesPullout Strength Models For FRP AnchorsJULIO VAZQUEZNo ratings yet
- Life 10 00084Document47 pagesLife 10 00084Mario DavilaNo ratings yet
- EN Product-Info Axio-Observer Bio Rel2-0Document24 pagesEN Product-Info Axio-Observer Bio Rel2-0marini sidekNo ratings yet
- Adavances in Positioning and FramesDocument407 pagesAdavances in Positioning and Framesoliwia.tolloczkoNo ratings yet
- EEE229 EEE223 GEE202 Problem Sheet 2 VC Actuators SolutionsDocument3 pagesEEE229 EEE223 GEE202 Problem Sheet 2 VC Actuators SolutionslordeinstNo ratings yet
- Week2-D2-Components of MatterDocument64 pagesWeek2-D2-Components of MatterIvy Joyce BuanNo ratings yet