You might also like
- Laboratorio-De-Potencia-Y-Maxima-Transferencia XDDocument16 pagesLaboratorio-De-Potencia-Y-Maxima-Transferencia XDMontalvo Cespedes MarcoNo ratings yet
- Problemas de Transferencia de Calor #4Document2 pagesProblemas de Transferencia de Calor #4Lucía Núñez SaldarriagaNo ratings yet
- Selección de vehículos para entidades: Guía paso a pasoDocument19 pagesSelección de vehículos para entidades: Guía paso a pasoMontalvo Cespedes MarcoNo ratings yet
- Laboratorio-De-Potencia-Y-Maxima-Transferencia XDDocument16 pagesLaboratorio-De-Potencia-Y-Maxima-Transferencia XDMontalvo Cespedes MarcoNo ratings yet
- Ejercicios Resueltos y Propuestos Del Ciclo Rankine SimpleDocument16 pagesEjercicios Resueltos y Propuestos Del Ciclo Rankine SimpleRafa Risse100% (1)
- Modulo Autocad Unprg CorresDocument139 pagesModulo Autocad Unprg CorresMontalvo Cespedes MarcoNo ratings yet
- 2016mar01 BecasMaestriaBelgica CONVOCATORIADocument2 pages2016mar01 BecasMaestriaBelgica CONVOCATORIAMontalvo Cespedes MarcoNo ratings yet
- Suministro de Materiales General-OkDocument20 pagesSuministro de Materiales General-OkMontalvo Cespedes MarcoNo ratings yet
- Le Estado FinancieroDocument3 pagesLe Estado FinancieroMontalvo Cespedes MarcoNo ratings yet
- Manejo Del Mercurio en La Pequeña MineriaDocument5 pagesManejo Del Mercurio en La Pequeña MineriaMontalvo Cespedes MarcoNo ratings yet
- TERMODINAMICA BASICA Erich A. Muller Www3.Imperial - Ac.ukDocument324 pagesTERMODINAMICA BASICA Erich A. Muller Www3.Imperial - Ac.ukSandra Castrillon0% (1)
- Ejercicios Resueltos y Propuestos Del Ciclo Rankine SimpleDocument16 pagesEjercicios Resueltos y Propuestos Del Ciclo Rankine SimpleRafa Risse100% (1)
- Energetica TraducciónnDocument24 pagesEnergetica TraducciónnMontalvo Cespedes MarcoNo ratings yet
- Modulo Autocad Unprg CorresDocument139 pagesModulo Autocad Unprg CorresMontalvo Cespedes MarcoNo ratings yet
- El Mercurio y La Salud de La PoblaciónDocument2 pagesEl Mercurio y La Salud de La PoblaciónMontalvo Cespedes MarcoNo ratings yet
- Centrales Elctricas II Argentina Evolucion Del Consumo de Energia Electrica en Los Ultimos 10 AñosDocument23 pagesCentrales Elctricas II Argentina Evolucion Del Consumo de Energia Electrica en Los Ultimos 10 AñosMontalvo Cespedes MarcoNo ratings yet
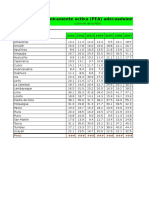
- 3.1 Poblacion Economicamente Activa Adecuadamente Empleada 2001 - 2013Document2 pages3.1 Poblacion Economicamente Activa Adecuadamente Empleada 2001 - 2013Montalvo Cespedes MarcoNo ratings yet
- Centrales Elctricas II Argentina Evolucion Del Consumo de Energia Electrica en Los Ultimos 10 AñosDocument23 pagesCentrales Elctricas II Argentina Evolucion Del Consumo de Energia Electrica en Los Ultimos 10 AñosMontalvo Cespedes MarcoNo ratings yet
- Refrigeración MagnéticaDocument4 pagesRefrigeración MagnéticaMontalvo Cespedes MarcoNo ratings yet
- Lineas de Transmision de Zona NorteDocument14 pagesLineas de Transmision de Zona NorteojalafuncioneNo ratings yet
- Modulo Autocad Unprg CorresDocument139 pagesModulo Autocad Unprg CorresMontalvo Cespedes MarcoNo ratings yet
- Munoz AdDocument149 pagesMunoz AdmanuelNo ratings yet
- Diagrams PDFDocument28 pagesDiagrams PDFErwin Antonio JVNo ratings yet
- Refrigeración MagnéticaDocument4 pagesRefrigeración MagnéticaMontalvo Cespedes MarcoNo ratings yet
- Refrigeración MagnéticaDocument4 pagesRefrigeración MagnéticaMontalvo Cespedes MarcoNo ratings yet
- Refrigeración MagnéticaDocument4 pagesRefrigeración MagnéticaMontalvo Cespedes MarcoNo ratings yet
- Centrales Eléctricas II ArgentinaDocument23 pagesCentrales Eléctricas II ArgentinaMontalvo Cespedes MarcoNo ratings yet
- Centrales Eléctricas II ArgentinaDocument23 pagesCentrales Eléctricas II ArgentinaMontalvo Cespedes MarcoNo ratings yet
- 2-Guia Industria BebidasDocument82 pages2-Guia Industria BebidasMontalvo Cespedes MarcoNo ratings yet
- Centrales Eléctricas II ArgentinaDocument23 pagesCentrales Eléctricas II ArgentinaMontalvo Cespedes MarcoNo ratings yet
- At1 - At2 PMKM10010Document10 pagesAt1 - At2 PMKM10010Eduardo Anchahua HuamaniNo ratings yet
- Impacto de Android en La IndustriaDocument32 pagesImpacto de Android en La Industriajonnathan ferney pedrozaNo ratings yet
- Actividad 08Document14 pagesActividad 08edwinNo ratings yet
- METRO4,0TEMPDocument4 pagesMETRO4,0TEMPLuZMary BaronRomeroNo ratings yet
- Proceso de Administración de CorrespondenciaDocument9 pagesProceso de Administración de CorrespondenciaKarol Juliana Villa MonsalveNo ratings yet
- Foundation 15Document7 pagesFoundation 15Ricardo Enrique MorenoNo ratings yet
- Planeamiento y control de obras para puente concretoDocument30 pagesPlaneamiento y control de obras para puente concretozoly1040% (1)
- Infoplc - Net - Comunicacic3b3n Entre Dos Cpus s7 1200 en Red Profinet Vc3ada TCP PDFDocument16 pagesInfoplc - Net - Comunicacic3b3n Entre Dos Cpus s7 1200 en Red Profinet Vc3ada TCP PDFsrvejita0% (1)
- Sistemas Fotovoltaicos Interconectados Con La RedDocument3 pagesSistemas Fotovoltaicos Interconectados Con La Redyoali2326No ratings yet
- Proveedores SkanskaDocument33 pagesProveedores SkanskaEdwin TorresNo ratings yet
- Carta Remisoria y AnexosDocument29 pagesCarta Remisoria y AnexosMANAGEMENT GROUP ENRIQUE ROMERONo ratings yet
- Universidad Nacional Autónoma de México: Facultad de Estudios Superiores Cuautitlan Campo 4Document133 pagesUniversidad Nacional Autónoma de México: Facultad de Estudios Superiores Cuautitlan Campo 4Luis LanderosNo ratings yet
- Buffer Simple y Buffer MúltipleDocument13 pagesBuffer Simple y Buffer MúltipleAlexiño Cieza ZamoraNo ratings yet
- Trabajo de GradoDocument64 pagesTrabajo de GradomanuelNo ratings yet
- Vacon Nxs NXP ManualDocument114 pagesVacon Nxs NXP Manualalpha1691No ratings yet
- Mejora de procesos de negocio y el aporte de softwareDocument31 pagesMejora de procesos de negocio y el aporte de softwareAlvaro LabradoNo ratings yet
- ETAPA 1: DIAGNÓSTICO TÉCNICO LEGAL DE POSESIONES INFORMALESDocument2 pagesETAPA 1: DIAGNÓSTICO TÉCNICO LEGAL DE POSESIONES INFORMALESTika Cuellar MinauroNo ratings yet
- PYP-Ramal LC.2B-2C-2D-3.1Document1 pagePYP-Ramal LC.2B-2C-2D-3.1raulNo ratings yet
- Consulta Diagramas UMLDocument4 pagesConsulta Diagramas UMLDavid Morales100% (1)
- Barzola BaldeonDocument86 pagesBarzola Baldeonismer gala carbajalNo ratings yet
- 08 0545 MiDocument196 pages08 0545 Mialexander montalvo rimariNo ratings yet
- GRX1 SokkiaDocument4 pagesGRX1 SokkiaageolopezNo ratings yet
- El Cambio y La MotivacionDocument22 pagesEl Cambio y La MotivacionKathleen GuerreroNo ratings yet
- Nom - 002 - Riesgos de Incendio y ExplosiónDocument19 pagesNom - 002 - Riesgos de Incendio y ExplosiónSERVICIOS ZIELKENo ratings yet
- Creación de bocetos y operaciones predefinidas en Autodesk InventorDocument86 pagesCreación de bocetos y operaciones predefinidas en Autodesk InventorAbraham Valencia SaavedraNo ratings yet
- Base Comun de Aprendizajes EsencialesDocument23 pagesBase Comun de Aprendizajes Esencialesclaribalte100% (2)
- Ladron de Julios Otros Sistemas PulsadosDocument7 pagesLadron de Julios Otros Sistemas Pulsadosjc1977rr100% (1)
- Telecomunicaciones en el Sistema Interconectado NacionalDocument71 pagesTelecomunicaciones en el Sistema Interconectado NacionalAnonymous Vav4wYNo ratings yet
- Equipos de TrabajoDocument8 pagesEquipos de TrabajoRikardo DiazNo ratings yet
- Detector de MetalesDocument2 pagesDetector de Metalesblack rock shooterNo ratings yet