You might also like
- Chennai Metro WaterDocument1 pageChennai Metro WaterGokul PorsezianNo ratings yet
- Cor On Va Virus Helpline NumberDocument1 pageCor On Va Virus Helpline NumberAim Softnet IT ProfessionalNo ratings yet
- Topics of The ConferenceDocument1 pageTopics of The ConferenceGokul PorsezianNo ratings yet
- Marvell IndiaDocument3 pagesMarvell IndiaGokul PorsezianNo ratings yet
- RF Wireless Http://nptel - Ac.in/courses/117102062/ Embedded Software Testing ArmDocument1 pageRF Wireless Http://nptel - Ac.in/courses/117102062/ Embedded Software Testing ArmGokul PorsezianNo ratings yet
- RF Wireless Http://nptel - Ac.in/courses/117102062/ Embedded Software Testing ArmDocument1 pageRF Wireless Http://nptel - Ac.in/courses/117102062/ Embedded Software Testing ArmGokul PorsezianNo ratings yet
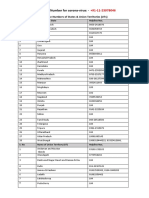
- College Name (IN Full) College Address (Detailed With Landmark) City Pin Code State Site Superviso R Name Contact NoDocument5 pagesCollege Name (IN Full) College Address (Detailed With Landmark) City Pin Code State Site Superviso R Name Contact NoGokul PorsezianNo ratings yet
- AAI ATC Question Paper 2009 PDF of AAI JRDocument6 pagesAAI ATC Question Paper 2009 PDF of AAI JRapullareddy100% (4)
- BEL Recruitment Exam Pattern: Test Sections and Syllabus DetailsDocument2 pagesBEL Recruitment Exam Pattern: Test Sections and Syllabus DetailsGokul PorsezianNo ratings yet
- JCLDocument45 pagesJCLMohamedSaifullahANo ratings yet
- COBOL RefresherDocument32 pagesCOBOL RefresherShaik ImranNo ratings yet
- Cobol 1Document1 pageCobol 1Gokul PorsezianNo ratings yet
- Part 2 - JCLDocument33 pagesPart 2 - JCLRicardo LopezNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- ATS Tech Talk Optimizing POWER7 and AIX Update Dec 2012 PDFDocument88 pagesATS Tech Talk Optimizing POWER7 and AIX Update Dec 2012 PDFimenhidouriNo ratings yet
- Computer ArchitectureDocument58 pagesComputer ArchitecturecathyNo ratings yet
- Windows Smart CardDocument89 pagesWindows Smart CardAnonymous 9bkCCPWNo ratings yet
- Embedded Systems Unit 8 NotesDocument17 pagesEmbedded Systems Unit 8 NotesPradeep Kumar Goud NadikudaNo ratings yet
- Pgiaccelerator OpenaccDocument13 pagesPgiaccelerator OpenaccAhmedNo ratings yet
- Practice Final ExamDocument3 pagesPractice Final ExamThành ThảoNo ratings yet
- Measuring Experimental Error in Microprocessor SimulationDocument12 pagesMeasuring Experimental Error in Microprocessor SimulationblackspideymakNo ratings yet
- CPSC 457 Operating Systems Final Exam SolutionDocument11 pagesCPSC 457 Operating Systems Final Exam SolutionmuanaserNo ratings yet
- AGL Functinal Safety (Youngsu Kwon) (r13)Document54 pagesAGL Functinal Safety (Youngsu Kwon) (r13)v53No ratings yet
- Ovn MainDocument54 pagesOvn MainAvenir BajraktariNo ratings yet
- Intel 80486 Microprocessor Architecture and FeaturesDocument8 pagesIntel 80486 Microprocessor Architecture and FeaturesLALRAZNo ratings yet
- A Technical 3PAR Presentation v9 4nov11 PDFDocument158 pagesA Technical 3PAR Presentation v9 4nov11 PDFPrasadValluraNo ratings yet
- MCQ Computer ScienceDocument87 pagesMCQ Computer SciencerakeshguptacseNo ratings yet
- Amd Au1100 400mbd BF DatasheetDocument2 pagesAmd Au1100 400mbd BF DatasheetFirdaus HanipahNo ratings yet
- Instruction Set Nios IIDocument89 pagesInstruction Set Nios IIHoàng KhánhNo ratings yet
- Capitulo4 5Document1 pageCapitulo4 5Enrico MaxwellNo ratings yet
- Essbase BSO Performance Tuning "A Hand-On Guide"Document28 pagesEssbase BSO Performance Tuning "A Hand-On Guide"Amit Sharma100% (3)
- Info SAEDocument182 pagesInfo SAEwertys90No ratings yet
- Future Trend of Microprocessor Design (Invited Paper) : Intel Corporation, Santa Clara, California USADocument4 pagesFuture Trend of Microprocessor Design (Invited Paper) : Intel Corporation, Santa Clara, California USAblackcoursarNo ratings yet
- VI. Implicit Parallelism - Instruction Level VI. Implicit Parallelism Instruction Level Parallelism. Pipeline Superscalar & Vector P ProcessorsDocument26 pagesVI. Implicit Parallelism - Instruction Level VI. Implicit Parallelism Instruction Level Parallelism. Pipeline Superscalar & Vector P Processorstt_aljobory3911No ratings yet
- Memory Hierarchy Design UNIT-V - Reducing Cache Miss Penalty and Rate via ParallelismDocument54 pagesMemory Hierarchy Design UNIT-V - Reducing Cache Miss Penalty and Rate via ParallelismmannanabdulsattarNo ratings yet
- Netspeed WhitepaperDocument8 pagesNetspeed WhitepaperkartimidNo ratings yet
- QlikView Best Practices - Development v0.5Document68 pagesQlikView Best Practices - Development v0.5Eleazar BrionesNo ratings yet
- 68k Chips FaqDocument29 pages68k Chips Faqgrga_grgur2082No ratings yet
- TitDocument6 pagesTitansumit85No ratings yet
- Cse-Vii-Advanced Computer Architectures (10CS74) - Assignment PDFDocument6 pagesCse-Vii-Advanced Computer Architectures (10CS74) - Assignment PDFGovindaRajuGowdaNo ratings yet
- SAP Sybase IQ 16 Hardware Sizing GuideDocument33 pagesSAP Sybase IQ 16 Hardware Sizing GuideJimmy Carbajal SánchezNo ratings yet
- EBC5612 1st ManualDocument176 pagesEBC5612 1st ManualSerginho HenriqueNo ratings yet
- ECE 452: Computer Organization and DesignDocument9 pagesECE 452: Computer Organization and Designdermeister1988No ratings yet
- Cache Coherence - MESI MOESIDocument57 pagesCache Coherence - MESI MOESIMohd ImranNo ratings yet