You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Intertext: HypertextDocument8 pagesIntertext: HypertextRaihana MacabandingNo ratings yet
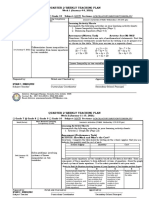
- Teaching Plan - Math 8 Week 1-8 PDFDocument8 pagesTeaching Plan - Math 8 Week 1-8 PDFRYAN C. ENRIQUEZNo ratings yet
- FT FocusDocument19 pagesFT Focusobi1kenobyNo ratings yet
- DS SX1280-1-2 V3.0Document143 pagesDS SX1280-1-2 V3.0bkzzNo ratings yet
- Best of The Photo DetectiveDocument55 pagesBest of The Photo DetectiveSazeed Hossain100% (3)
- Demand Determinants EEMDocument22 pagesDemand Determinants EEMPrabha KaranNo ratings yet
- Fire Guard Study MaterialDocument14 pagesFire Guard Study MaterialSerina Sanusi100% (1)
- EPSS 627: DescriptionDocument2 pagesEPSS 627: DescriptionudayakumartNo ratings yet
- Eu Clinical TrialDocument4 pagesEu Clinical TrialAquaNo ratings yet
- Computer in Community Pharmacy by Adnan Sarwar ChaudharyDocument10 pagesComputer in Community Pharmacy by Adnan Sarwar ChaudharyDr-Adnan Sarwar Chaudhary100% (1)
- Commercial BanksDocument11 pagesCommercial BanksSeba MohantyNo ratings yet
- Manuscript PDFDocument50 pagesManuscript PDFMartina Mae Benig GinoNo ratings yet
- DISTRICT CENSUS HANDBOOK North GoaDocument190 pagesDISTRICT CENSUS HANDBOOK North Goants1020No ratings yet
- Portfolio AdityaDocument26 pagesPortfolio AdityaAditya DisNo ratings yet
- Model Contract FreelanceDocument3 pagesModel Contract FreelancemarcosfreyervinnorskNo ratings yet
- New - BMP3005 - ABF - Assessment Brief - FDocument5 pagesNew - BMP3005 - ABF - Assessment Brief - Fmilka traykovNo ratings yet
- What Is Terrorism NotesDocument3 pagesWhat Is Terrorism NotesSyed Ali HaiderNo ratings yet
- T10 - PointersDocument3 pagesT10 - PointersGlory of Billy's Empire Jorton KnightNo ratings yet
- Polyembryony &its ImportanceDocument17 pagesPolyembryony &its ImportanceSURIYA PRAKASH GNo ratings yet
- CBSE Class 10 Science Sample Paper SA 2 Set 1Document5 pagesCBSE Class 10 Science Sample Paper SA 2 Set 1Sidharth SabharwalNo ratings yet
- CCNP SWITCH 300-115 - Outline of The Official Study GuideDocument31 pagesCCNP SWITCH 300-115 - Outline of The Official Study GuidehammiesinkNo ratings yet
- Automated Facilities Layout Past Present and FutureDocument19 pagesAutomated Facilities Layout Past Present and FutureJose Luis Diaz BetancourtNo ratings yet
- Silk Road Ensemble in Chapel HillDocument1 pageSilk Road Ensemble in Chapel HillEmil KangNo ratings yet
- Npad PGP2017-19Document3 pagesNpad PGP2017-19Nikhil BhattNo ratings yet
- Thesis Topics in Medicine in Delhi UniversityDocument8 pagesThesis Topics in Medicine in Delhi UniversityBecky Goins100% (2)
- Final Notice To Global Girls Degree CollgeDocument2 pagesFinal Notice To Global Girls Degree CollgeIbn E AdamNo ratings yet
- Chapter 12Document15 pagesChapter 12kk5522No ratings yet
- 120 Câu Tìm Từ Đồng Nghĩa-Trái Nghĩa-Dap AnDocument9 pages120 Câu Tìm Từ Đồng Nghĩa-Trái Nghĩa-Dap AnAlex TranNo ratings yet
- A Quantitative Method For Evaluation of CAT Tools Based On User Preferences. Anna ZaretskayaDocument5 pagesA Quantitative Method For Evaluation of CAT Tools Based On User Preferences. Anna ZaretskayaplanetalinguaNo ratings yet
- Virtual Feeder Segregation Using IIoT and Cloud TechnologiesDocument7 pagesVirtual Feeder Segregation Using IIoT and Cloud Technologiespjgandhi100% (2)