You might also like
- M.Tech(IT) Advanced Computer Architecture SyllabusDocument1 pageM.Tech(IT) Advanced Computer Architecture SyllabusShiv Kumar100% (1)
- Simple Perceptrons CapacityDocument8 pagesSimple Perceptrons CapacitySungho HongNo ratings yet
- 32 Most Important Email Etiquette TipsDocument9 pages32 Most Important Email Etiquette Tipskantha_raj43100% (3)
- Introduction To AlgorithmsDocument6 pagesIntroduction To Algorithmsavi05raj0% (1)
- Chap ChaosDocument34 pagesChap ChaosRithish BarathNo ratings yet
- TB04 - Soft Computing Ebook PDFDocument356 pagesTB04 - Soft Computing Ebook PDFPrasannajs Jagadeesan Sankaran100% (4)
- Boundary Value Problem NumecDocument17 pagesBoundary Value Problem NumecshakiruNo ratings yet
- Heat Transfer Cengel Solution Manual PDFDocument1 pageHeat Transfer Cengel Solution Manual PDFAntonio ChacónNo ratings yet
- Introduction To Neural NetworkDocument20 pagesIntroduction To Neural NetworkSal SaadNo ratings yet
- Assignment 2 SolnDocument3 pagesAssignment 2 SolnpostscriptNo ratings yet
- Perceptron Learning RulesDocument38 pagesPerceptron Learning RulesVivek Goyal50% (2)
- The P.Eng. Applicant's Guide to Studying for the PPE ExamDocument16 pagesThe P.Eng. Applicant's Guide to Studying for the PPE Examnevinkoshy100% (1)
- 1503 Sample Interview Questions Mechanical EngineeringDocument2 pages1503 Sample Interview Questions Mechanical EngineeringBaskar ANgadeNo ratings yet
- 400+ TOP COMPILER DESIGN LAB VIVA Questions and AnswersDocument22 pages400+ TOP COMPILER DESIGN LAB VIVA Questions and Answersravi sharmaNo ratings yet
- Factors Affecting Elasticity and Moduli of ElasticityDocument130 pagesFactors Affecting Elasticity and Moduli of ElasticityRathodNo ratings yet
- Notes About Vibration Control AnalysisDocument126 pagesNotes About Vibration Control AnalysisFaizan MirNo ratings yet
- Mechanical Engineering 2 PDFDocument15 pagesMechanical Engineering 2 PDFHardikDevdaNo ratings yet
- Artificial Intelligence - Chapter 2 Agents and Rational Agents Part IIDocument32 pagesArtificial Intelligence - Chapter 2 Agents and Rational Agents Part IIZeeshan BhattiNo ratings yet
- Agents: G.Victo Sudha GeorgeDocument28 pagesAgents: G.Victo Sudha GeorgeS.Srinidhi sandoshkumarNo ratings yet
- 2021 Lecture02 IntelligentAgentsDocument65 pages2021 Lecture02 IntelligentAgentsNguyen ThongNo ratings yet
- Intro AIDocument154 pagesIntro AIDivyanshu RawatNo ratings yet
- Lecture 02: Tasks and Agents Types: Dr. Rashid AhmadDocument24 pagesLecture 02: Tasks and Agents Types: Dr. Rashid AhmadTooba LiaquatNo ratings yet
- AI Chapter 2 AgentsDocument28 pagesAI Chapter 2 AgentsSheena KhannaNo ratings yet
- 2020 CS300 Lecture02 IntelligentAgentsDocument65 pages2020 CS300 Lecture02 IntelligentAgentsDai TrongNo ratings yet
- m2 AgentsDocument42 pagesm2 AgentsTariq IqbalNo ratings yet
- Cs 171 01 Agents Smrq16Document33 pagesCs 171 01 Agents Smrq16PratyushNo ratings yet
- Lec 02Document32 pagesLec 02Sourabh ShahNo ratings yet
- Lecture 1 - Intelligent AgentDocument11 pagesLecture 1 - Intelligent AgentBilal ShahidNo ratings yet
- Chapter Two Part 1 ALDocument27 pagesChapter Two Part 1 ALBiruk TesfawNo ratings yet
- Lecture 2 AgentDocument44 pagesLecture 2 AgentmusaNo ratings yet
- CH 2 Intellegent AgentsDocument46 pagesCH 2 Intellegent Agentskassahun gebrieNo ratings yet
- Module - 1 Introduction To Artificial IntelligenceDocument75 pagesModule - 1 Introduction To Artificial IntelligenceVinay B RNo ratings yet
- Intelligent AgentsDocument36 pagesIntelligent AgentsSourav GangulyNo ratings yet
- m2 AgentsDocument60 pagesm2 AgentsNimraNo ratings yet
- CS480 Lecture August 29thDocument64 pagesCS480 Lecture August 29thRajeswariNo ratings yet
- CS302 Unit1-IDocument21 pagesCS302 Unit1-IPrakhar GargNo ratings yet
- AI Artificial Intelligence IntroductionDocument39 pagesAI Artificial Intelligence IntroductionshohanNo ratings yet
- Lec 05 - AgentsDocument31 pagesLec 05 - AgentsMateen AhmedNo ratings yet
- Fall 2014 CS470 - Introduction To Artificial IntelligenceDocument50 pagesFall 2014 CS470 - Introduction To Artificial IntelligenceTuan LaiNo ratings yet
- Agentm2 AgentsDocument45 pagesAgentm2 AgentsAmirah DiyanaNo ratings yet
- AI-Lec02bySohaibCH - UpdatedDocument21 pagesAI-Lec02bySohaibCH - UpdatedZainab LiaquatNo ratings yet
- Lecture 03Document13 pagesLecture 03ALi SaLman RahatNo ratings yet
- Fundamentals of AI: Intelligent AgentsDocument19 pagesFundamentals of AI: Intelligent AgentsjollyggNo ratings yet
- Artificial Intelligence: Unit 1-IDocument24 pagesArtificial Intelligence: Unit 1-IANKUSH NEGINo ratings yet
- Artificial Intelligence (ECE 470/ECE 569A) : Introduction To AIDocument28 pagesArtificial Intelligence (ECE 470/ECE 569A) : Introduction To AIMalcolm FenelonNo ratings yet
- Ai CH2Document34 pagesAi CH2Nurlign YitbarekNo ratings yet
- AI-Intelligent Agents: Dr. Azhar MahmoodDocument45 pagesAI-Intelligent Agents: Dr. Azhar MahmoodMansoor QaisraniNo ratings yet
- AI Chapter02Document29 pagesAI Chapter02魏延任No ratings yet
- Intelligent AgentsDocument37 pagesIntelligent AgentstauraiNo ratings yet
- Summary - Intelligent AgentsDocument37 pagesSummary - Intelligent AgentsIbsa Gemechu100% (1)
- 01 - IntroDocument34 pages01 - IntroDeyu ZhangNo ratings yet
- 01 - IntroDocument34 pages01 - IntroDeyu ZhangNo ratings yet
- Agents Artificial IntelligenceDocument32 pagesAgents Artificial IntelligencemohitkgecNo ratings yet
- 2.agent Search and Game PlayingDocument35 pages2.agent Search and Game PlayingRandeep PoudelNo ratings yet
- CSC 462 - AI-Week 01Document30 pagesCSC 462 - AI-Week 01ladikapubg6420No ratings yet
- Lecture 2Document48 pagesLecture 2Md. Moshiur Rahman MugdhoNo ratings yet
- AI Lec2-1Document24 pagesAI Lec2-1Omar SaberNo ratings yet
- Ai 1Document33 pagesAi 1Shaza KhotNo ratings yet
- lecture+1+Introduction (1)Document38 pageslecture+1+Introduction (1)ezaat.shalbyNo ratings yet
- Teach 02 - 2020 Chapter 2 - Intelligent AgentUpdatedDocument41 pagesTeach 02 - 2020 Chapter 2 - Intelligent AgentUpdatedabuNo ratings yet
- IT Project Management Chapter 6 Project ImplementationDocument25 pagesIT Project Management Chapter 6 Project ImplementationZeeshan BhattiNo ratings yet
- BS Electronics Final Year Projects Proposal Final Aproval List.Document1 pageBS Electronics Final Year Projects Proposal Final Aproval List.Zeeshan BhattiNo ratings yet
- ZeeshanAcademy Registration Form and Fees Structure 2Document2 pagesZeeshanAcademy Registration Form and Fees Structure 2Zeeshan Bhatti100% (1)
- BS Software Engineering (Morning) Final Year Projects Proposal Final List.Document2 pagesBS Software Engineering (Morning) Final Year Projects Proposal Final List.Zeeshan BhattiNo ratings yet
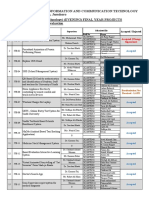
- BS Informatin Technology (Evening) Final Year Projects Proposal Final List.Document2 pagesBS Informatin Technology (Evening) Final Year Projects Proposal Final List.Zeeshan BhattiNo ratings yet
- Computer Graphics - Lab Project 4: 2D TransformationDocument4 pagesComputer Graphics - Lab Project 4: 2D TransformationZeeshan Bhatti100% (1)
- BS Software Engineering (Evening) Final Year Projects Proposal Final List.Document1 pageBS Software Engineering (Evening) Final Year Projects Proposal Final List.Zeeshan BhattiNo ratings yet
- IT Project Management: Chapter 5 Risk ManagemntDocument31 pagesIT Project Management: Chapter 5 Risk ManagemntZeeshan BhattiNo ratings yet
- BS Information Technology (Morning) Final Year Projects Proposal Final Approval List.Document2 pagesBS Information Technology (Morning) Final Year Projects Proposal Final Approval List.Zeeshan Bhatti100% (2)
- BS Telecommunication Final Year Projects Proposal Final Approval List.Document1 pageBS Telecommunication Final Year Projects Proposal Final Approval List.Zeeshan Bhatti0% (1)
- IT Project Management: Chapter 4 Resource Plan and Cost EstimationDocument44 pagesIT Project Management: Chapter 4 Resource Plan and Cost EstimationZeeshan BhattiNo ratings yet
- BSIT (Evening) Final Year Projects Proposal Evaluation ReportDocument3 pagesBSIT (Evening) Final Year Projects Proposal Evaluation ReportZeeshan BhattiNo ratings yet
- Artificial Intelligence: Chapter 4 Introduction To Knowledge Base SystemsDocument20 pagesArtificial Intelligence: Chapter 4 Introduction To Knowledge Base SystemsZeeshan BhattiNo ratings yet
- Artificial Intelligence Chapter 3: Problem Solving and SearchingDocument94 pagesArtificial Intelligence Chapter 3: Problem Solving and SearchingZeeshan Bhatti100% (1)
- BSIT (Morning) Final Year Projects Proposal Evaluation ReportDocument3 pagesBSIT (Morning) Final Year Projects Proposal Evaluation ReportZeeshan BhattiNo ratings yet
- Artificial Intelligence: Chapter 5 - Machine LearningDocument30 pagesArtificial Intelligence: Chapter 5 - Machine LearningZeeshan BhattiNo ratings yet
- BSSW (Morning) Final Year Projects Proposal Evaluation ReportDocument2 pagesBSSW (Morning) Final Year Projects Proposal Evaluation ReportZeeshan BhattiNo ratings yet
- IT Project Management - Chapter 3 Project Estimating Techniques and ToolsDocument73 pagesIT Project Management - Chapter 3 Project Estimating Techniques and ToolsZeeshan BhattiNo ratings yet
- Computer Graphics - Chapter 3 Solid Area Polygon FillingDocument13 pagesComputer Graphics - Chapter 3 Solid Area Polygon FillingZeeshan BhattiNo ratings yet
- BSSW (Evening) Final Year Projects Proposal Evaluation ReportDocument2 pagesBSSW (Evening) Final Year Projects Proposal Evaluation ReportZeeshan BhattiNo ratings yet
- BSTC Morning PrjEvalDocument2 pagesBSTC Morning PrjEvalZeeshan BhattiNo ratings yet
- Artificial Intelligence - Chapter 2 Agents and Rational Agents Part IIDocument32 pagesArtificial Intelligence - Chapter 2 Agents and Rational Agents Part IIZeeshan BhattiNo ratings yet
- IICT Final Year Project Result 2K12 BatchDocument13 pagesIICT Final Year Project Result 2K12 BatchZeeshan BhattiNo ratings yet
- BSEL Morning PrjEvalDocument2 pagesBSEL Morning PrjEvalZeeshan BhattiNo ratings yet
- Lecture 1 - Introduction To IT Project ManagementDocument51 pagesLecture 1 - Introduction To IT Project ManagementZeeshan BhattiNo ratings yet
- Chapter 2 - IPM - Developing Project PlanDocument72 pagesChapter 2 - IPM - Developing Project PlanZeeshan BhattiNo ratings yet
- Final Year Projects Exhibition Notification 2015Document1 pageFinal Year Projects Exhibition Notification 2015Zeeshan BhattiNo ratings yet
- Current Old Testament LiteratureDocument2 pagesCurrent Old Testament LiteratureLaura TashmanNo ratings yet
- Enzyme ImmobilizationDocument2 pagesEnzyme ImmobilizationriyaNo ratings yet
- Subhlekha RasukunnaDocument2 pagesSubhlekha RasukunnalaxmikantNo ratings yet
- Landmark Judgements ArbitrationDocument8 pagesLandmark Judgements ArbitrationShreesha Bhat KailankajeNo ratings yet
- Area Perimeter Lesson Plan 1Document3 pagesArea Perimeter Lesson Plan 1api-541765085No ratings yet
- Ms. Rochelle P. Sulitas – Grade 7 SCIENCE Earth and Space Learning PlanDocument4 pagesMs. Rochelle P. Sulitas – Grade 7 SCIENCE Earth and Space Learning PlanEmelynNo ratings yet
- Royal Family Tree Complete WebsiteDocument6 pagesRoyal Family Tree Complete Websiteapi-284485484100% (1)
- R2Document4 pagesR2Gercel MillareNo ratings yet
- A Vindication of The Rights of WomanDocument12 pagesA Vindication of The Rights of WomanloveismagicNo ratings yet
- Writing For Broadcast Media (With Sample Script)Document19 pagesWriting For Broadcast Media (With Sample Script)Rajesh Cheemalakonda100% (3)
- Boldenone UndDocument2 pagesBoldenone UndAhmedNo ratings yet
- Moot Medical NegligenceDocument39 pagesMoot Medical NegligenceJUHI BHUTANINo ratings yet
- B Aligarh MovementDocument32 pagesB Aligarh MovementKjsiddiqui BablooNo ratings yet
- Wacay Christine Joy A. (Manuscript)Document60 pagesWacay Christine Joy A. (Manuscript)Raymart C. LinaNo ratings yet
- A Prototype System For Handwritten Sub-Word Recognition: Toward Arabic-Manuscript TransliterationDocument8 pagesA Prototype System For Handwritten Sub-Word Recognition: Toward Arabic-Manuscript TransliterationhamaidataeiNo ratings yet
- Renaissance Architecture: Hoa V Sir MvsaDocument24 pagesRenaissance Architecture: Hoa V Sir Mvsarevathi hariharanNo ratings yet
- Comparative Rhetorical AnalysisDocument6 pagesComparative Rhetorical Analysisapi-457201784No ratings yet
- Best Chart PatternsDocument17 pagesBest Chart PatternsrenkoNo ratings yet
- Mass Communication Theory and Four ErasDocument4 pagesMass Communication Theory and Four ErasJohana VangchhiaNo ratings yet
- Mapping Earths Interior ExtractDocument4 pagesMapping Earths Interior ExtractJoanna CerreliNo ratings yet
- (IEC) 60652 Loading Tests On Overhead Line StructuresDocument13 pages(IEC) 60652 Loading Tests On Overhead Line Structuresjulesjusayan100% (1)
- Analyzing Literature to Connect to the WorldDocument17 pagesAnalyzing Literature to Connect to the WorldSheila's Diary100% (1)
- Come To Jesus - ChartDocument1 pageCome To Jesus - ChartLaura Iova VioletaNo ratings yet
- 2016 2017 Retail CatalogueDocument40 pages2016 2017 Retail CatalogueDicky AndryNo ratings yet
- Art Appreciation ReviewerDocument6 pagesArt Appreciation ReviewerElla Mae100% (1)
- GRADES 1 To 12 Daily Lesson Log 7 Mapeh/Music 2 Sessions-2 Hours 2 Quarter Session1 Session2 Session3 Session4Document4 pagesGRADES 1 To 12 Daily Lesson Log 7 Mapeh/Music 2 Sessions-2 Hours 2 Quarter Session1 Session2 Session3 Session4Jhenny Cyee Zee86% (7)
- Acute Renal Failure - PPT 1Document36 pagesAcute Renal Failure - PPT 1Jay PaulNo ratings yet
- SOLAR LIGHT POLE FOUNDATION DESIGNDocument44 pagesSOLAR LIGHT POLE FOUNDATION DESIGNJason Secret100% (2)
- Spiritual AssessmentDocument4 pagesSpiritual AssessmentCharm ArroyoNo ratings yet
- Chess Studies Comprising One Thousand GaDocument197 pagesChess Studies Comprising One Thousand GaYandy Rojas BarriosNo ratings yet