You might also like
- User GuideDocument97 pagesUser GuideVictor GarciaNo ratings yet
- How to Use and Upgrade to GM Gen III LS-Series Powertrain Control SystemsFrom EverandHow to Use and Upgrade to GM Gen III LS-Series Powertrain Control SystemsRating: 3.5 out of 5 stars3.5/5 (4)
- TD2310-02EN Troubleshooting Manual 3000 - 4000 5th GenDocument1,113 pagesTD2310-02EN Troubleshooting Manual 3000 - 4000 5th Genabdelhadi houssinNo ratings yet
- ComponentsDocument14 pagesComponentsNgoc NguyenNo ratings yet
- SAE J1939 TrainingDocument80 pagesSAE J1939 Trainingjocker100% (1)
- J1939 Datalink CommunicationDocument16 pagesJ1939 Datalink CommunicationNgoc Nguyen100% (1)
- Surface Vehicle Recommended PracticeDocument29 pagesSurface Vehicle Recommended Practiceidrd8527No ratings yet
- SAE J1939 Messages 2Document6 pagesSAE J1939 Messages 2GIUSEPPE100% (3)
- Aeb02181 SCR Controls Interface Req.Document37 pagesAeb02181 SCR Controls Interface Req.Jose SantosNo ratings yet
- Vehicle InterfaceDocument20 pagesVehicle InterfaceNgoc NguyenNo ratings yet
- Allison DOC 7.0 User GuideDocument138 pagesAllison DOC 7.0 User GuideLiviu Neda100% (7)
- AC Delco Bus Diag PDFDocument8 pagesAC Delco Bus Diag PDFschraeubleNo ratings yet
- Peugeot 406 Owners Manual 2003Document84 pagesPeugeot 406 Owners Manual 2003husni103180% (15)
- Plugin DTC Fault Codes PDFDocument106 pagesPlugin DTC Fault Codes PDFRafael HubnerNo ratings yet
- Allison - CEC2 Trouble ShootingDocument243 pagesAllison - CEC2 Trouble ShootingJacques Van Niekerk67% (3)
- Allison DOC (R) For PC User GuideDocument311 pagesAllison DOC (R) For PC User Guideayman akrab100% (2)
- Scania j1939 FMSDocument80 pagesScania j1939 FMSzibetto67% (3)
- J1939 Communication Training: Presented by Industrial ESI September, 2011Document58 pagesJ1939 Communication Training: Presented by Industrial ESI September, 2011mauricio olaya100% (7)
- SAE J1939 ExtendedDocument49 pagesSAE J1939 Extendedhamidh100% (4)
- Argosy Driver's ManualDocument222 pagesArgosy Driver's ManualRodolfo Alberto Muñoz CarcamoNo ratings yet
- Allison Prognostics BodygearsDocument4 pagesAllison Prognostics Bodygearsrbrto100% (1)
- J1939 Code ManualDocument341 pagesJ1939 Code ManualGiapy Phuc Tran100% (5)
- CAN J1939StackManualDocument67 pagesCAN J1939StackManualngntran75% (4)
- 1407 VWTC Su140716Document32 pages1407 VWTC Su140716taksasNo ratings yet
- Monitoring J1939 Diagnostic Trouble CodesDocument9 pagesMonitoring J1939 Diagnostic Trouble CodesRafael CardenasNo ratings yet
- SAE J1939 CAN Communications Used in Woodward GAP™ ControlsDocument23 pagesSAE J1939 CAN Communications Used in Woodward GAP™ ControlsS Eko AnangNo ratings yet
- j1939 ProtocolDocument2 pagesj1939 ProtocolFaraz ElectronicNo ratings yet
- Roland Berger Computer On WheelsDocument24 pagesRoland Berger Computer On WheelsTime to Relax100% (1)
- j1939 Vs ISO 15765Document34 pagesj1939 Vs ISO 15765jockerNo ratings yet
- j1939 Users ManualDocument24 pagesj1939 Users ManualFaraz Electronic100% (1)
- Sae J1939Document28 pagesSae J1939dsp4usNo ratings yet
- J1939Training Rev2Document72 pagesJ1939Training Rev2Timon2005100% (2)
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- J1939 Data Mapping ExplainedDocument13 pagesJ1939 Data Mapping ExplainedRafael Cardenas100% (3)
- Control System in AutomobilesDocument30 pagesControl System in AutomobilesSudhakar Ramasamy100% (1)
- Sae j1939Document24 pagesSae j1939Gabriel Hernandez Gaspar100% (3)
- J1939Document7 pagesJ1939megatornado100% (1)
- D 1 Markstepper 1Document25 pagesD 1 Markstepper 1chfakht100% (2)
- Allison Transmission ECUDocument1 pageAllison Transmission ECULouis Hardy50% (2)
- TOYOTA Owners Manual LandCruiser 2013Document36 pagesTOYOTA Owners Manual LandCruiser 2013Joseph Tek100% (1)
- Mack Titan AutraliaDocument8 pagesMack Titan AutraliaDIONYBLINKNo ratings yet
- Allison Presentation For Bus SeriesDocument22 pagesAllison Presentation For Bus SeriesnikodjoleNo ratings yet
- J1939 PresentationDocument46 pagesJ1939 Presentationjrsimma90% (10)
- Sae J 1939-74Document36 pagesSae J 1939-74fabio coala100% (1)
- J1939 Communication Training PDFDocument58 pagesJ1939 Communication Training PDFLuis Miguel Herrera Cuartas100% (1)
- J1939 ExplainDocument11 pagesJ1939 ExplainJatin ChotaliyaNo ratings yet
- 2012 Audi A4 s4 ManualDocument310 pages2012 Audi A4 s4 ManualNorberto MonárrezNo ratings yet
- J1939 Serial Data Sheet FinalDocument2 pagesJ1939 Serial Data Sheet Finalapi-1985258033% (3)
- J1939 Training: - AgendaDocument72 pagesJ1939 Training: - AgendaRafael Cardenas100% (4)
- b5 45-06Document15 pagesb5 45-06Tanee BoonmalertNo ratings yet
- J1939 Protocol StackDocument46 pagesJ1939 Protocol StackAlexandre RibeiroNo ratings yet
- Displaying Engine Data Using SAE J1939Document28 pagesDisplaying Engine Data Using SAE J1939Tiến Lâm NguyễnNo ratings yet
- McKinsey Telecoms. RECALL No. 09, 2009 - Operational TransformationDocument48 pagesMcKinsey Telecoms. RECALL No. 09, 2009 - Operational TransformationkentselveNo ratings yet
- Q&A - What Is SAE J1939?: (Source For The Following Answers: SAE HS-1939)Document3 pagesQ&A - What Is SAE J1939?: (Source For The Following Answers: SAE HS-1939)Ponraj Govindarajan100% (1)
- In Vehicle NetworkingDocument5 pagesIn Vehicle NetworkingRana PrataapNo ratings yet
- J1939 IntroductionDocument2 pagesJ1939 Introductionjrsimma0% (1)
- J1939 01 PDFDocument7 pagesJ1939 01 PDFMauro100% (1)
- J1708 J1587 J1939 MID ListingDocument4 pagesJ1708 J1587 J1939 MID ListingJose Armando Miranda VelascoNo ratings yet
- Sae J1939Document50 pagesSae J1939crisoforo gutierrez ramirezNo ratings yet
- j1708 IntroductionDocument5 pagesj1708 Introductionjrsimma100% (1)
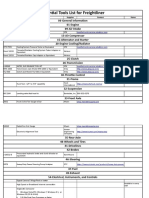
- Essential Tool List For Freightliner - MasterDocument4 pagesEssential Tool List For Freightliner - MasterAngel FraustoNo ratings yet
- CAN / J1939 Manual: DCU 305 R3Document29 pagesCAN / J1939 Manual: DCU 305 R3Chazaq celestinoNo ratings yet
- Can CH2 Trucks - Saej1939 PDFDocument39 pagesCan CH2 Trucks - Saej1939 PDFwtn2013No ratings yet
- Ts-45-Fault-Codes-Booklet Murphy PDFDocument68 pagesTs-45-Fault-Codes-Booklet Murphy PDFIvan Perez0% (1)
- Gears Magazine - TIPM Problems! Intermittent Fail Safe, Codes, Related Concerns and SolutionsDocument8 pagesGears Magazine - TIPM Problems! Intermittent Fail Safe, Codes, Related Concerns and SolutionsMUH ILHAM MARZUKINo ratings yet
- 18-4 p10 Implementing j1939 in Vehicle Design Hans Juergen Mantsch MentorDocument8 pages18-4 p10 Implementing j1939 in Vehicle Design Hans Juergen Mantsch MentormohanNo ratings yet
- Design and Implementation of SAE J1939 Vehicle Diagnostics SystemDocument4 pagesDesign and Implementation of SAE J1939 Vehicle Diagnostics Systemk019No ratings yet
- With ESC & ABS For An Actively Safer DriveDocument4 pagesWith ESC & ABS For An Actively Safer DriveMd azri SidikNo ratings yet
- Ford Fiesta R2 Kit Parts Manual Ford Fiesta R2 Kit Parts Manual ...Document50 pagesFord Fiesta R2 Kit Parts Manual Ford Fiesta R2 Kit Parts Manual ...Juan Ramón Pérez LorenzoNo ratings yet
- Motor Vehicle Level 3: ResourceDocument20 pagesMotor Vehicle Level 3: ResourcesengottaiyanNo ratings yet
- Peugeot 406 2003 UKDocument13 pagesPeugeot 406 2003 UKjuangutierrezf93No ratings yet
- Corolla Altis X 1.6 Variants BrochureDocument14 pagesCorolla Altis X 1.6 Variants BrochureROMEO JUTTNo ratings yet
- 2015 Hyundai I40 VF SpecificationsDocument3 pages2015 Hyundai I40 VF SpecificationsJamesNo ratings yet
- 2017 Ram 1500 SpecificationsDocument14 pages2017 Ram 1500 SpecificationsRomanvi1980No ratings yet
- Capstan CabrestanteDocument67 pagesCapstan CabrestanteFernando CastroNo ratings yet
- TF3002Document3 pagesTF3002septian wahyu widodoNo ratings yet
- 35Document9 pages35m mainNo ratings yet
- Drivers-Manual TelmaDocument8 pagesDrivers-Manual TelmaJuan Zangetsu UchihaNo ratings yet
- Power Distribution (Power and Ground Distribution)Document3 pagesPower Distribution (Power and Ground Distribution)Alejandro Quiñones VelazquezNo ratings yet
- 2011 Audi TT Tts Roadster 71995Document260 pages2011 Audi TT Tts Roadster 71995Alex DinuNo ratings yet
- KTM Adventure Range Folder MY21-ENDocument33 pagesKTM Adventure Range Folder MY21-ENMelon SegarNo ratings yet
- Workshop Manual: N SeriesDocument2 pagesWorkshop Manual: N Seriesoctavio hernandezNo ratings yet
- Royal Enfield Classic 350 Technical SpecificationsDocument2 pagesRoyal Enfield Classic 350 Technical SpecificationsMariusTdrNo ratings yet
- Hilux EbrochureDocument24 pagesHilux EbrochureDaru Kurniawan Ahmadi100% (1)
- Business Class M2 Workshop Manual-4Document295 pagesBusiness Class M2 Workshop Manual-4Dinator CortésNo ratings yet
- Subaru Impreza 2007-11Document26 pagesSubaru Impreza 2007-11Angus WhitnallNo ratings yet
- SynopsisDocument8 pagesSynopsismanoj kumarNo ratings yet
- BMW 530i M Sport PDFDocument2 pagesBMW 530i M Sport PDFVicky VikcyNo ratings yet
- SM 17Document307 pagesSM 17Miguel MartinezNo ratings yet