You might also like
- Review Taylor SeriesDocument5 pagesReview Taylor Seriestarun gehlot100% (1)
- Jacobian Matrix and DeterminantDocument8 pagesJacobian Matrix and DeterminantPrantik Adhar SamantaNo ratings yet
- 17 Lagrange Interpolation Mathematica ProgramDocument14 pages17 Lagrange Interpolation Mathematica ProgramShashank MishraNo ratings yet
- Chapter5: Joint Probability DistributionsDocument39 pagesChapter5: Joint Probability DistributionsVidya MalavNo ratings yet
- Calculator Techniques v1.1 - 092015Document104 pagesCalculator Techniques v1.1 - 092015Erin Joseph Del CarmenNo ratings yet
- Standard Integration FormulasDocument5 pagesStandard Integration FormulasMika Vernadeth SingNo ratings yet
- Gauss EliminationDocument3 pagesGauss Eliminationaniket choleNo ratings yet
- Fourier Series, Fourier Integral, Fourier TransformDocument29 pagesFourier Series, Fourier Integral, Fourier Transformvasu_koneti5124No ratings yet
- NUMERICAL METHODS FOR SOLVING ODEsDocument38 pagesNUMERICAL METHODS FOR SOLVING ODEsSupriya RaiNo ratings yet
- Lecture Notes On Differential EquationsDocument51 pagesLecture Notes On Differential EquationsSachin AryanNo ratings yet
- Function Approximation, Interpolation, and Curve Fitting PDFDocument53 pagesFunction Approximation, Interpolation, and Curve Fitting PDFMikhail Tabucal100% (1)
- Integration Formula: + C U Du VDX Udx DX V U Udx C CudxDocument5 pagesIntegration Formula: + C U Du VDX Udx DX V U Udx C CudxRon AtaNo ratings yet
- Ch17 Curve FittingDocument44 pagesCh17 Curve FittingSandip GaikwadNo ratings yet
- Majd Shhadi, PHD: First Semester 2018/2019Document28 pagesMajd Shhadi, PHD: First Semester 2018/2019aliNo ratings yet
- Numerical Methods On Solving Systems of Linear EquationsDocument35 pagesNumerical Methods On Solving Systems of Linear EquationsRobby Andre ChingNo ratings yet
- System of Linear EquationsDocument37 pagesSystem of Linear EquationsHucen Nashyd MohamedNo ratings yet
- Numerical Solution of Differential EquationsDocument17 pagesNumerical Solution of Differential Equationsmohammed tahaNo ratings yet
- Unit3 - Numerical Integration PDFDocument23 pagesUnit3 - Numerical Integration PDFpreetamNo ratings yet
- Nonlinear ProgrammingDocument5 pagesNonlinear Programminguser2127No ratings yet
- Integration by PartsDocument25 pagesIntegration by PartsAshari RamadhanNo ratings yet
- Numerical Methods ReviewerDocument2 pagesNumerical Methods ReviewerKim Brian CarboNo ratings yet
- Basic Matlab ExercisesDocument11 pagesBasic Matlab ExercisesAntony Real100% (1)
- Calculus Indefinite IntegralDocument9 pagesCalculus Indefinite Integralnicusor.iacob5680No ratings yet
- Curve FittingDocument31 pagesCurve FittingNoel DaefNo ratings yet
- Exponential DistributionDocument20 pagesExponential DistributionAhmar NiaziNo ratings yet
- Chapter 2 - Laplace Transform PDFDocument34 pagesChapter 2 - Laplace Transform PDFSritaran BalakrishnanNo ratings yet
- MATH 113 Integral Calculus ProblemsDocument13 pagesMATH 113 Integral Calculus ProblemsStand Out100% (1)
- Numerical Solution of Ordinary Differential Equations Part 2 - Nonlinear EquationsDocument38 pagesNumerical Solution of Ordinary Differential Equations Part 2 - Nonlinear EquationsMelih TecerNo ratings yet
- Numerical Methods For EngineersDocument6 pagesNumerical Methods For EngineersmoinNo ratings yet
- Complex Analysis For Mathematics and Engineering CompressDocument792 pagesComplex Analysis For Mathematics and Engineering CompressĐào RubyNo ratings yet
- Numerical Methods For ODE and PDEDocument114 pagesNumerical Methods For ODE and PDERaman DeepNo ratings yet
- Lu DecompositionDocument33 pagesLu DecompositionEngrFaisalNo ratings yet
- Unit-3 Application of Differential EquationDocument20 pagesUnit-3 Application of Differential EquationRock TalNo ratings yet
- Comparative Analysis of Different Numerical Methods For The Solution of Initial Value Problems in First Order Ordinary Differential EquationsDocument3 pagesComparative Analysis of Different Numerical Methods For The Solution of Initial Value Problems in First Order Ordinary Differential EquationsEditor IJTSRDNo ratings yet
- Numerical Methods With MATLAB PDFDocument189 pagesNumerical Methods With MATLAB PDFISTIANNo ratings yet
- Principles of Least SquaresDocument44 pagesPrinciples of Least SquaresdrdahmanNo ratings yet
- 06 Jacobi Gauss SeidelDocument65 pages06 Jacobi Gauss SeidelKim Harly100% (1)
- 2012 Gauss Seidel JacobiDocument34 pages2012 Gauss Seidel JacobiKukuh KurniadiNo ratings yet
- Topics - Numerical Solutions PDFDocument1 pageTopics - Numerical Solutions PDFmpvfollosco100% (1)
- Numerical Solutions of Second Order Boundary Value Problems by Galerkin Residual Method On Using Legendre PolynomialsDocument11 pagesNumerical Solutions of Second Order Boundary Value Problems by Galerkin Residual Method On Using Legendre PolynomialsIOSRjournalNo ratings yet
- Numerical Analysis PDFDocument15 pagesNumerical Analysis PDFaauppalNo ratings yet
- Department of Mathematics Established 1997Document17 pagesDepartment of Mathematics Established 1997Ram Swaroop100% (1)
- Matrices and VectorsDocument27 pagesMatrices and VectorsIzzaNo ratings yet
- Differential Equations (MATH313) : Basic ConceptsDocument12 pagesDifferential Equations (MATH313) : Basic ConceptsPaul Santos NonatNo ratings yet
- Variable SeparableDocument21 pagesVariable SeparableErwin Ronald CalmaNo ratings yet
- Numerical Methods Question BankDocument10 pagesNumerical Methods Question BankvignanarajNo ratings yet
- Optimization Class Notes MTH-9842Document25 pagesOptimization Class Notes MTH-9842felix.apfaltrer7766No ratings yet
- Gauss Jordan PDFDocument14 pagesGauss Jordan PDFAlFahad100% (1)
- Create vectors with regular and logarithmic spacingDocument1 pageCreate vectors with regular and logarithmic spacingFakhre AlamNo ratings yet
- Vector and ScalarDocument51 pagesVector and ScalarMusic LastNo ratings yet
- TUP Taguig Campus Mechanical Engineering Implicit DifferentiationDocument17 pagesTUP Taguig Campus Mechanical Engineering Implicit DifferentiationStewart StevenNo ratings yet
- Differential EquationsDocument65 pagesDifferential EquationsRayhan BNo ratings yet
- Applications of Numerical MethodsDocument54 pagesApplications of Numerical Methodstarun gehlotNo ratings yet
- Exact Differential EquationsDocument17 pagesExact Differential EquationsWASEEM_AKHTERNo ratings yet
- Lesson 9 Integration of Hyperbolic FunctionsDocument12 pagesLesson 9 Integration of Hyperbolic Functionsjason roqueNo ratings yet
- Matlab Code Bisection MethodDocument2 pagesMatlab Code Bisection MethodMalik Mohammad AsifNo ratings yet
- Lec# 21 Lebesgue Outer MeasureDocument21 pagesLec# 21 Lebesgue Outer MeasureZeeshanNawazBalochNo ratings yet
- Power Series Math 55Document22 pagesPower Series Math 55JohnNo ratings yet
- Iterative Solution of Nonlinear Equations in Several VariablesFrom EverandIterative Solution of Nonlinear Equations in Several VariablesNo ratings yet
- Gaussian Quadrature FormulaDocument11 pagesGaussian Quadrature FormulaKidist TaluNo ratings yet
- Matrix Multiplication ProgramDocument12 pagesMatrix Multiplication Programsachin rawatNo ratings yet
- Assignment (3) Solution using White Whale optimization algorithmDocument13 pagesAssignment (3) Solution using White Whale optimization algorithmBassam SamyNo ratings yet
- 1.3 Gauss Elimination MethodDocument6 pages1.3 Gauss Elimination Methodshravan mandalNo ratings yet
- Math in 2025Document223 pagesMath in 2025fakename129129No ratings yet
- Planning Problem StripsDocument16 pagesPlanning Problem StripsRaghu SomuNo ratings yet
- Combinatorics 11695Document41 pagesCombinatorics 11695Klaus BudaNo ratings yet
- Num Computing Notes OnlyDocument102 pagesNum Computing Notes OnlyKelvin SudaniNo ratings yet
- Perceptron Example (Practice Que)Document26 pagesPerceptron Example (Practice Que)uijnNo ratings yet
- Minimum Refueling Stops: Problem 8Document24 pagesMinimum Refueling Stops: Problem 8ZainNo ratings yet
- Solving Problems by SearchingDocument37 pagesSolving Problems by Searchingdragon smallNo ratings yet
- Future For Scientific Computing Using PythonDocument7 pagesFuture For Scientific Computing Using PythonSaraswathi ANo ratings yet
- FIR Filtering and ConvolutionDocument32 pagesFIR Filtering and ConvolutionThành Vinh PhạmNo ratings yet
- Quick Interpretation of The DataDocument5 pagesQuick Interpretation of The DatathrivetherapycollectiveNo ratings yet
- The 0-1 Knapsack Problem: An Introductory SurveyDocument13 pagesThe 0-1 Knapsack Problem: An Introductory SurveyRahma JabriNo ratings yet
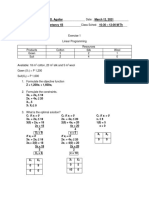
- AEC4 - Aguilar, Hayna Marie - BSA1B - Exercise1Document3 pagesAEC4 - Aguilar, Hayna Marie - BSA1B - Exercise1Hayna Marie AguilarNo ratings yet
- Laboratory Exercise 3: Discrete-Time Signals: Frequency-Domain RepresentationsDocument18 pagesLaboratory Exercise 3: Discrete-Time Signals: Frequency-Domain RepresentationsNguyễn HưngNo ratings yet
- Activations, Loss Functions & Optimizers in MLDocument29 pagesActivations, Loss Functions & Optimizers in MLAniket DharNo ratings yet
- Principles of Numerical Weather Prediction and Modeling-7 by Prof.A.S.N.MurtyDocument14 pagesPrinciples of Numerical Weather Prediction and Modeling-7 by Prof.A.S.N.MurtyPantulu MurtyNo ratings yet
- Machine Learning For Beginners PDFDocument29 pagesMachine Learning For Beginners PDFfrankyNo ratings yet
- Numerical Methods OptimizationDocument19 pagesNumerical Methods Optimizationahmad ramdanNo ratings yet
- Segment-6 Discrete Fourier Transform (DFT) & Fast Fourier Transform (FFT)Document32 pagesSegment-6 Discrete Fourier Transform (DFT) & Fast Fourier Transform (FFT)mghabirNo ratings yet
- Dumisani Maths Prac AssignmentDocument6 pagesDumisani Maths Prac AssignmentDumisani Tawanda DubeNo ratings yet
- Chapter 11Document14 pagesChapter 11abdullah aboamarahNo ratings yet
- Otras Soluciones Algebraicas A Las Ecuaciones Polinomicas de Tercer y Cuarto GradoDocument7 pagesOtras Soluciones Algebraicas A Las Ecuaciones Polinomicas de Tercer y Cuarto GradoLuis Rami CastNo ratings yet
- TP Oc2 S2 2022Document2 pagesTP Oc2 S2 2022Mohamed HamritNo ratings yet
- EGM6365: Structural Optimization EGM6365: Structural OptimizationDocument9 pagesEGM6365: Structural Optimization EGM6365: Structural OptimizationSamer ElabdNo ratings yet
- Runge Phenomenon AnalysisDocument29 pagesRunge Phenomenon AnalysisGaston GonzalezNo ratings yet
- MATLAB programs for numerical solutionsDocument9 pagesMATLAB programs for numerical solutionsfaizan soudagarNo ratings yet
- MIDPOINTDocument12 pagesMIDPOINTEvan Earl Santiago CasanayanNo ratings yet
- Numerical Optimization: Lecture Notes #24 Nonlinear Least Squares - Orthogonal Distance RegressionDocument21 pagesNumerical Optimization: Lecture Notes #24 Nonlinear Least Squares - Orthogonal Distance RegressionemwlupeNo ratings yet