You might also like
- Diode PDFDocument37 pagesDiode PDFgleensolis100% (1)
- EIS BoukampDocument97 pagesEIS BoukampMiraldaNo ratings yet
- Me 482 ENERGY CONSERVATION AND MANAGENET Text Book Prepared by Faris KK FOR KTU S8Document103 pagesMe 482 ENERGY CONSERVATION AND MANAGENET Text Book Prepared by Faris KK FOR KTU S8vpzfaris85% (13)
- Cisco HyperFlex Systems Technical DeckDocument81 pagesCisco HyperFlex Systems Technical Deckkinan_kazuki104No ratings yet
- Ac To DC Conversion (Rectifier) : Power Electronics and Drives (Version 3-2003), Dr. Zainal Salam, 2003 1Document41 pagesAc To DC Conversion (Rectifier) : Power Electronics and Drives (Version 3-2003), Dr. Zainal Salam, 2003 1İbrahim KayğanNo ratings yet
- Rectifier PDFDocument40 pagesRectifier PDFrahmanrestu33% (3)
- Ac To DC Conversion (Rectifier) : Power Electronics and Drives (Version 3-2003), Dr. Zainal Salam, 2003 1Document41 pagesAc To DC Conversion (Rectifier) : Power Electronics and Drives (Version 3-2003), Dr. Zainal Salam, 2003 1hdrzaman9439No ratings yet
- Simple and Accurate Formula For Calculating The Conduction Angle of Single Phase RectifierDocument3 pagesSimple and Accurate Formula For Calculating The Conduction Angle of Single Phase RectifierMichele Oconnor0% (1)
- UNIT II - PE - Control - 1PFWRectifiers PDFDocument24 pagesUNIT II - PE - Control - 1PFWRectifiers PDFramaNo ratings yet
- Dioda Beban RDocument10 pagesDioda Beban RDamar Putra BriliawanNo ratings yet
- 2 Diode RectifierDocument63 pages2 Diode RectifierKaltoum Robleh jiirNo ratings yet
- CH 09Document66 pagesCH 09Praveen Kumar Kilaparthi0% (1)
- Chapter 2 - RectifiersDocument59 pagesChapter 2 - RectifiersTàu NguyễnNo ratings yet
- Lec 9Document27 pagesLec 9ahmed ragabNo ratings yet
- Chapter 8Document48 pagesChapter 8hamzaNo ratings yet
- Transmission Lines in Frequency Domain and Space DomainDocument38 pagesTransmission Lines in Frequency Domain and Space DomainDeepak MakhijaNo ratings yet
- Chopper Basic PDFDocument12 pagesChopper Basic PDFSoumya DuttaNo ratings yet
- 2 Rangkaian Penyesuai ImpedansiDocument9 pages2 Rangkaian Penyesuai ImpedansiDicky DarmawanNo ratings yet
- Half Wave Rectifier - Edited With Full WaveDocument68 pagesHalf Wave Rectifier - Edited With Full WavedeivaNo ratings yet
- 20 - L-9 (DK) (Pe) ( (Ee) Nptel)Document1 page20 - L-9 (DK) (Pe) ( (Ee) Nptel)GagneNo ratings yet
- MK Elda PenyearahTerkendali2017Document51 pagesMK Elda PenyearahTerkendali2017satryaNo ratings yet
- Analog Electronics Lecture-27-21032024Document24 pagesAnalog Electronics Lecture-27-21032024Sayam SanchetiNo ratings yet
- Module 2Document21 pagesModule 2Anandu DipukumarNo ratings yet
- Transmission Lines by Sarthak SinghalDocument46 pagesTransmission Lines by Sarthak SinghalPratibha YadavNo ratings yet
- Chapter 1-Part 1: Half-Wave RectifiersDocument50 pagesChapter 1-Part 1: Half-Wave RectifiersWeehao SiowNo ratings yet
- Where Do You Need This?: 1.maintenance Engineer 2.energy Management System 3.energy ManagerDocument46 pagesWhere Do You Need This?: 1.maintenance Engineer 2.energy Management System 3.energy Managerconference RequirementsNo ratings yet
- EE3104 - L1 TL and Telegrapher EquationDocument29 pagesEE3104 - L1 TL and Telegrapher EquationDerek WangNo ratings yet
- Half Wave Rectifier With Mathematical AnalysisDocument13 pagesHalf Wave Rectifier With Mathematical AnalysisKJMWebsite.xyz100% (9)
- Lecture 3Document12 pagesLecture 3geofrey fungoNo ratings yet
- Lec01 1Document63 pagesLec01 1awabnasirahmednasirNo ratings yet
- Diode RectifiersDocument32 pagesDiode RectifiersMahmoud AfifyNo ratings yet
- 1.15.crystal Diode As A Rectifier:: Is Zero. Both The Load Voltage and Current Are of Are Shown in Figure 1.29Document10 pages1.15.crystal Diode As A Rectifier:: Is Zero. Both The Load Voltage and Current Are of Are Shown in Figure 1.29Robert EvansNo ratings yet
- محاضرة الاسبوع الاولDocument7 pagesمحاضرة الاسبوع الاولMohammad alhaboob2030No ratings yet
- EEE 1287-Fall 2019-Topic 07Document46 pagesEEE 1287-Fall 2019-Topic 07Ahnaf AmerNo ratings yet
- CHAP3.Arus Bolak BalikDocument35 pagesCHAP3.Arus Bolak BalikOmi Luthfia RahmanNo ratings yet
- AC Voltage ControllerDocument6 pagesAC Voltage ControllerTuhin ShahNo ratings yet
- Basics: TOPIC: (2) There Are Two Scinario We Will Encounter in The Network TheoryDocument9 pagesBasics: TOPIC: (2) There Are Two Scinario We Will Encounter in The Network TheorynaveensilveriNo ratings yet
- Half Wave and Full Wave RectifiersDocument5 pagesHalf Wave and Full Wave RectifiersRajesh PylaNo ratings yet
- Homework 1Document8 pagesHomework 1Yooncheul JeungNo ratings yet
- 15 - L-9 (DK) (Pe) ( (Ee) Nptel)Document1 page15 - L-9 (DK) (Pe) ( (Ee) Nptel)GagneNo ratings yet
- Selection of SCR Rating For Fully Controlled Rectifier: - Prepared ByDocument11 pagesSelection of SCR Rating For Fully Controlled Rectifier: - Prepared ByRahul SinghNo ratings yet
- DT - NU-EEE342-Lecture 3-Transmission Lines 2017 PDFDocument54 pagesDT - NU-EEE342-Lecture 3-Transmission Lines 2017 PDFSabit ShaihollaNo ratings yet
- Alternating CurrentDocument11 pagesAlternating Currentjayaditya soniNo ratings yet
- Single Phase Half Bridge InverterDocument29 pagesSingle Phase Half Bridge InverterGnanaseharan Arunachalam100% (1)
- Power Electronics - Chapter 3Document50 pagesPower Electronics - Chapter 3av_00115240100% (8)
- Lecture 8Document8 pagesLecture 8Centvie Joie F. AlbeosNo ratings yet
- 05 Applications of DiodesDocument46 pages05 Applications of Diodes陳浚維No ratings yet
- Alternating Current RL Circuits: 1 ObjectivesDocument7 pagesAlternating Current RL Circuits: 1 ObjectivesElliott M.No ratings yet
- PDO Course 2Document67 pagesPDO Course 21MM1R HL'No ratings yet
- Section 2: Power System Mathematics and Physics, Three-Phase, Power FactorDocument65 pagesSection 2: Power System Mathematics and Physics, Three-Phase, Power FactorKhuram TabassomNo ratings yet
- Symmetrical Faults PDFDocument27 pagesSymmetrical Faults PDFHassan LalaNo ratings yet
- 1PH Half Bridge InverterDocument31 pages1PH Half Bridge InvertertintuvrNo ratings yet
- Lec 11Document42 pagesLec 11ahmed ragabNo ratings yet
- Ac The Impedance WayDocument38 pagesAc The Impedance WayLabib RaFiNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- Easy(er) Electrical Principles for General Class Ham License (2019-2023)From EverandEasy(er) Electrical Principles for General Class Ham License (2019-2023)No ratings yet
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2From EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2No ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1No ratings yet
- Lecture NotesDocument1 pageLecture NotesHassan SayedNo ratings yet
- CII User ManualDocument51 pagesCII User Manualabhinavgiri17No ratings yet
- Naac SSRDocument137 pagesNaac SSRvpzfarisNo ratings yet
- 3 Sidor Från Digital Protection For Power SystemsDocument21 pages3 Sidor Från Digital Protection For Power SystemsManirajPerumalNo ratings yet
- Seventh Semester B.Tech - First Series Examamination: Part B: Answer Any Three Questions 3×10 30 MarksDocument4 pagesSeventh Semester B.Tech - First Series Examamination: Part B: Answer Any Three Questions 3×10 30 MarksvpzfarisNo ratings yet
- 5C014C64F1709Document1 page5C014C64F1709vpzfarisNo ratings yet
- Speed Control of Wound Rotor Induction Motor Using Rotor Resistance Control AimDocument5 pagesSpeed Control of Wound Rotor Induction Motor Using Rotor Resistance Control AimvpzfarisNo ratings yet
- Network Theory EC201 NoteDocument70 pagesNetwork Theory EC201 NotevpzfarisNo ratings yet
- EE206 Material ScienceDocument2 pagesEE206 Material Sciencevpzfaris50% (2)
- Emd First Module PDFDocument35 pagesEmd First Module PDFvpzfarisNo ratings yet
- EC 307 Power Electronics and Instrumentation Lecture Notes, Module 6Document21 pagesEC 307 Power Electronics and Instrumentation Lecture Notes, Module 6vpzfaris100% (1)
- M6-EE409 Electrical Machine Design NotesDocument7 pagesM6-EE409 Electrical Machine Design NotesvpzfarisNo ratings yet
- DC Motors and Generatos QuestionsDocument2 pagesDC Motors and Generatos QuestionsvpzfarisNo ratings yet
- 2017 Current AffairsDocument11 pages2017 Current AffairsvpzfarisNo ratings yet
- Experiment No. 1 Load Test On Squirrel Cage Induction MotorDocument1 pageExperiment No. 1 Load Test On Squirrel Cage Induction MotorvpzfarisNo ratings yet
- 10 Hve mqp1476880070Document3 pages10 Hve mqp1476880070vpzfarisNo ratings yet
- Air Bearing 1Document1 pageAir Bearing 1vpzfarisNo ratings yet
- GO (P) No 07-2016-Fin Dated 20.01.16 With Index PDFDocument359 pagesGO (P) No 07-2016-Fin Dated 20.01.16 With Index PDFvpzfarisNo ratings yet
- Al-Ameen Engineering College Department of Electrical and Electronics EngineeringDocument1 pageAl-Ameen Engineering College Department of Electrical and Electronics EngineeringvpzfarisNo ratings yet
- Academic Calendar 16-17 - B.tech-Even SemDocument2 pagesAcademic Calendar 16-17 - B.tech-Even SemAkshayGovindNo ratings yet
- EE333 Electrical Machines Lab IIDocument2 pagesEE333 Electrical Machines Lab IIvpzfarisNo ratings yet
- Course Plan EnergyDocument8 pagesCourse Plan EnergyvpzfarisNo ratings yet
- Benefits of Power FactorDocument7 pagesBenefits of Power FactorNitin SundriyalNo ratings yet
- What Is Electron MicrosDocument6 pagesWhat Is Electron MicrosvpzfarisNo ratings yet
- ECDocument132 pagesECAkhil Paul VNo ratings yet
- Clamp MeterDocument3 pagesClamp MetervpzfarisNo ratings yet
- ECDocument132 pagesECAkhil Paul VNo ratings yet
- Total Harmonic DistortionDocument4 pagesTotal Harmonic DistortionVivek KaushikNo ratings yet
- Scheme - and - Syl - Electronics - and - Electrical - 2014 1 PDFDocument127 pagesScheme - and - Syl - Electronics - and - Electrical - 2014 1 PDFvpzfarisNo ratings yet
- Defects in Fusion WeldingDocument83 pagesDefects in Fusion WeldingBalakumar100% (1)
- Design-of-Experiments Study To Examine The Effect of Polarity On Stud WeldingDocument8 pagesDesign-of-Experiments Study To Examine The Effect of Polarity On Stud WeldingtazzorroNo ratings yet
- Python (Dictionary)Document54 pagesPython (Dictionary)shahrukhkr.gptNo ratings yet
- Wärtsilä NOXDocument35 pagesWärtsilä NOXDeepesh MerchantNo ratings yet
- 2022 Cayley Contest: The Centre For Education in Mathematics and Computing Cemc - Uwaterloo.caDocument282 pages2022 Cayley Contest: The Centre For Education in Mathematics and Computing Cemc - Uwaterloo.catony dooNo ratings yet
- Opsis Technique Eng 2007Document4 pagesOpsis Technique Eng 2007sukumariicbNo ratings yet
- Canal RegulatorDocument13 pagesCanal RegulatorBibhuti Bhusan Sahoo100% (1)
- Elemental Analysis of Crude OilsDocument8 pagesElemental Analysis of Crude OilsMirzan Alexandra Torres LaraNo ratings yet
- Product Position and Overview: Infoplus.21 Foundation CourseDocument22 pagesProduct Position and Overview: Infoplus.21 Foundation Courseursimmi100% (1)
- DDR3 and LPDDR3 Measurement and Analysis: 6 Series MSO Opt. 6-CMDDR3 and Opt. 6-DBDDR3 Application DatasheetDocument14 pagesDDR3 and LPDDR3 Measurement and Analysis: 6 Series MSO Opt. 6-CMDDR3 and Opt. 6-DBDDR3 Application DatasheetNaveenNo ratings yet
- About Ramfs Rootfs InitramfsDocument7 pagesAbout Ramfs Rootfs InitramfsNavaneethNo ratings yet
- Exam I: Turabo University School of Engineering Department of Mechanical Engineering MEEN 621 Boundary LayersDocument2 pagesExam I: Turabo University School of Engineering Department of Mechanical Engineering MEEN 621 Boundary LayersJoseph O. Camacho IrizarryNo ratings yet
- Study of Selected Petroleum Refining Residuals Industry StudyDocument60 pagesStudy of Selected Petroleum Refining Residuals Industry StudyOsama AdilNo ratings yet
- Notes 240105 063345 933Document6 pagesNotes 240105 063345 933Rachel MaharaniNo ratings yet
- Ecs448 Chapter 5a ArchDocument28 pagesEcs448 Chapter 5a Archdixn__No ratings yet
- Stress Gradients in AlbertaDocument22 pagesStress Gradients in AlbertaBehzadDastjerdyNo ratings yet
- Read Me: Pro Tools 10.3.2 and Pro Tools HD 10.3.2 On Windows 7Document26 pagesRead Me: Pro Tools 10.3.2 and Pro Tools HD 10.3.2 On Windows 7jvenvenNo ratings yet
- NuPolar Quality Testing and ComparisonsDocument12 pagesNuPolar Quality Testing and Comparisonsou82muchNo ratings yet
- Rational Algebraic Expressions: ObjectivesDocument11 pagesRational Algebraic Expressions: ObjectivesSonny ArgolidaNo ratings yet
- Sen2022 Software Engineering Analysis and DesignDocument84 pagesSen2022 Software Engineering Analysis and DesignElif KaraatlıNo ratings yet
- Lipid TestDocument4 pagesLipid TestHak KubNo ratings yet
- Engineeringinterviewquestions Com RCC Structures Design Multiple Choice QuestionDocument87 pagesEngineeringinterviewquestions Com RCC Structures Design Multiple Choice QuestionRajeev BansalNo ratings yet
- Object Kpis For The Digital Transformation: June 2020Document12 pagesObject Kpis For The Digital Transformation: June 2020MUHAMMAD FIKRI DEVIANESNo ratings yet
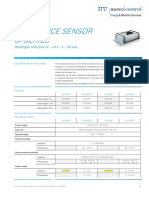
- DB Irradiance Sensor Si-Series en 20171016Document3 pagesDB Irradiance Sensor Si-Series en 20171016Solar ProjectsNo ratings yet
- CAPTAIN250DITEINCOMPLETEAug 2020Document15 pagesCAPTAIN250DITEINCOMPLETEAug 2020billal toufik BendjimaNo ratings yet
- Addressable Loop Isolator Module AI 520Document2 pagesAddressable Loop Isolator Module AI 520ராஜா கிருஷ்ணன்No ratings yet
- Basic of Statistical DataDocument15 pagesBasic of Statistical DatacataiceNo ratings yet
- FFT Analysis of Poorly Organized NanoporesDocument5 pagesFFT Analysis of Poorly Organized NanoporesJuly Gonzalez BonagasNo ratings yet
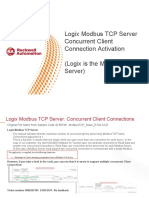
- Change To ModbusTCP Slave R102Document8 pagesChange To ModbusTCP Slave R102Евгений МалыченкоNo ratings yet