You might also like
- PLC工 WS2N-10MR-Z V1.3Document16 pagesPLC工 WS2N-10MR-Z V1.3splinter inc50% (2)
- Converteam Adp21 DPDocument89 pagesConverteam Adp21 DPWhendi BmNo ratings yet
- JX493 Engine Parts ManualDocument118 pagesJX493 Engine Parts ManualГригорий Усачёв100% (2)
- 红外发射说明书V1.0 2010-12-25Document12 pages红外发射说明书V1.0 2010-12-25chqfu2002No ratings yet
- XMJA 8000流量积算仪使用说明书 PDFDocument20 pagesXMJA 8000流量积算仪使用说明书 PDFRoy Naldo NapitupuluNo ratings yet
- SAMA (Basic Logic)Document47 pagesSAMA (Basic Logic)Yosi Hervindo KurniawanNo ratings yet
- Modbus Io16tDocument22 pagesModbus Io16tRaffaeleNo ratings yet
- FK3U 24MT 6AI2AO使用手册Document12 pagesFK3U 24MT 6AI2AO使用手册Nguyễn Đăng Đức100% (1)
- 2015 健行盃高中職循線及避障自走車競賽 Arduino車講義 1Document111 pages2015 健行盃高中職循線及避障自走車競賽 Arduino車講義 1laserstationNo ratings yet
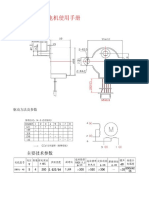
- 24BYJ48 步进电机使用手册Document7 pages24BYJ48 步进电机使用手册cqlNo ratings yet
- (V1.4)SDI0829-X1系列(SDI0809 19 29-X1 24位低电压模数转换器 Dec11 17 (CDS)Document13 pages(V1.4)SDI0829-X1系列(SDI0809 19 29-X1 24位低电压模数转换器 Dec11 17 (CDS)AnkitShingalaNo ratings yet
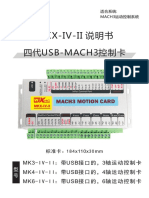
- MACH3 Control Cord Manual-MKX-IV-IIDocument18 pagesMACH3 Control Cord Manual-MKX-IV-IIDaniel NituNo ratings yet
- 第6章Document51 pages第6章banzhu095No ratings yet
- Mini红外避障传感器用户手册V1.0 2010-10-15Document11 pagesMini红外避障传感器用户手册V1.0 2010-10-15chqfu2002No ratings yet
- Fy 900Document9 pagesFy 900謝秉儒No ratings yet
- ADM 4280 C - V2说明书Document5 pagesADM 4280 C - V2说明书l1f3b00kNo ratings yet
- Sy 3011Document24 pagesSy 3011Trie WahyudiNo ratings yet
- 红外遥控接收模块套件用户手册2010 10 25Document14 pages红外遥控接收模块套件用户手册2010 10 25chqfu2002No ratings yet
- DS NVEM CH-新Document31 pagesDS NVEM CH-新abelmil123No ratings yet
- SDI0819用户手册(S版) V2Document8 pagesSDI0819用户手册(S版) V2Agus GPNo ratings yet
- AN00226-Rotary Cutter RevD CNDocument10 pagesAN00226-Rotary Cutter RevD CNRaco LocoNo ratings yet
- GY 955V2手册Document6 pagesGY 955V2手册ramiresSNo ratings yet
- XIZI OTIS - HAMCB Manual1540371679193Document103 pagesXIZI OTIS - HAMCB Manual1540371679193Tes Voreak80% (5)
- Controlador de Vibração CUHDocument43 pagesControlador de Vibração CUHMaria Helena Ludovico SoledadeNo ratings yet
- arduino学习笔记Document212 pagesarduino学习笔记wenyuanzhifengNo ratings yet
- 170方向盘舵机使用手册-标准(V1 3)Document26 pages170方向盘舵机使用手册-标准(V1 3)Jose Vilc.No ratings yet
- DMS-055A说明书v1 0Document28 pagesDMS-055A说明书v1 0許駿瑋No ratings yet
- R Series Brushless DC Motor DrivesDocument2 pagesR Series Brushless DC Motor DrivespinokioNo ratings yet
- MACH3控制卡: MK3-I V: 带USB接 口 的 ,3轴 运 动 控 制 卡 MK4- I V: 带USB接 口 的 ,4轴 运 动 控 制 卡 MK6- I V: 带USB接 口 的 ,6轴 运 动 控 制 卡Document19 pagesMACH3控制卡: MK3-I V: 带USB接 口 的 ,3轴 运 动 控 制 卡 MK4- I V: 带USB接 口 的 ,4轴 运 动 控 制 卡 MK6- I V: 带USB接 口 的 ,6轴 运 动 控 制 卡carlos israel g. wiebeckNo ratings yet
- FY2200S系列用户手册V2 5Document11 pagesFY2200S系列用户手册V2 5Ahmad DriverNo ratings yet
- MS1112Document24 pagesMS1112Dashuai WuNo ratings yet
- IRC5系统机器人培训Document152 pagesIRC5系统机器人培训TensaigaNo ratings yet
- Alim RD6006Document63 pagesAlim RD6006Charles DelajouxNo ratings yet
- Beijing-Fanuc 技术部Document59 pagesBeijing-Fanuc 技术部Tony ChangNo ratings yet
- arduino 常用語說明Document6 pagesarduino 常用語說明Eric ThengNo ratings yet
- HL3000 China PDFDocument57 pagesHL3000 China PDFCường MchwNo ratings yet
- 20120523151656DSSD332 DTSD342-1B型电压电流表使用说明书 - 硬件:开关电源1V1.0三行液晶120312 -Document26 pages20120523151656DSSD332 DTSD342-1B型电压电流表使用说明书 - 硬件:开关电源1V1.0三行液晶120312 -muhammad nazirNo ratings yet
- 28071Document97 pages28071labrosse.maintenanceNo ratings yet
- AX1s/1n/2n系列PLC 使用手册Document90 pagesAX1s/1n/2n系列PLC 使用手册julianNo ratings yet
- hcm 编译原理 第15讲 代码优化 20221024Document80 pageshcm 编译原理 第15讲 代码优化 20221024qiaoaikuNo ratings yet
- 三菱PLC A系列 模拟输入输出模块A1S66ADA PDFDocument46 pages三菱PLC A系列 模拟输入输出模块A1S66ADA PDF杨建华No ratings yet
- BL1616 EtcDocument9 pagesBL1616 EtckibriaNo ratings yet
- DF9011精密瞬态转速仪Document16 pagesDF9011精密瞬态转速仪Aziz SaputraNo ratings yet
- A4B-A Electric Control ManualDocument10 pagesA4B-A Electric Control Manualfatiminha.mvdaNo ratings yet
- 电子综合设计元宝Document14 pages电子综合设计元宝jyuanbao24No ratings yet
- Arduino最全的中文教程Document47 pagesArduino最全的中文教程paperlesswormNo ratings yet
- ATK-HC05蓝牙串口模块使用说明 (NANO F1) - AN1802Document18 pagesATK-HC05蓝牙串口模块使用说明 (NANO F1) - AN1802JIAYI LIUNo ratings yet
- Umw-C347376Document8 pagesUmw-C347376Andres GvNo ratings yet
- XM004Document15 pagesXM004mr.dominic3415No ratings yet
- 传人记 三菱PLC的指令系统Document11 pages传人记 三菱PLC的指令系统vv ppNo ratings yet
- SCMT介绍手册Document14 pagesSCMT介绍手册John YuNo ratings yet
- MACH3运动控制卡使用说明手册V1 1Document43 pagesMACH3运动控制卡使用说明手册V1 1Daniel NituNo ratings yet
- A11 三轴机械雕刻控制系统 - 中文接线手册Document17 pagesA11 三轴机械雕刻控制系统 - 中文接线手册Ahmed UtabNo ratings yet
- 完整DV900说明书 PDFDocument107 pages完整DV900说明书 PDFWilly NursalimNo ratings yet
- Ec10 ManualDocument8 pagesEc10 Manualnaseer449No ratings yet
- IMASO11Document3 pagesIMASO11huichuan wangNo ratings yet
- Fonte ChonesDocument12 pagesFonte ChonesRichard DenteNo ratings yet
- O O O O M M M M P P P P 6666 0000 刀 刀 刀 刀 具 具 具 具 量 量 量 量 測 測 測 測 系 系 系 系 統 統 統 統 中 中 中 中 文 文 文 文 技 技 技 技 術 術 術 術 資 資 資 資 料 料 料 料Document24 pagesO O O O M M M M P P P P 6666 0000 刀 刀 刀 刀 具 具 具 具 量 量 量 量 測 測 測 測 系 系 系 系 統 統 統 統 中 中 中 中 文 文 文 文 技 技 技 技 術 術 術 術 資 資 資 資 料 料 料 料Ziyang XieNo ratings yet
- 轧机Document9 pages轧机liuxin6166711No ratings yet
- FX2LPDocument54 pagesFX2LPem330No ratings yet
- 研究生應有的學習態度Document34 pages研究生應有的學習態度em330No ratings yet
- USB 2.0 高速裝置設計Document45 pagesUSB 2.0 高速裝置設計em330No ratings yet
- 壓電材料能量擷取Document13 pages壓電材料能量擷取em330No ratings yet
- A Regression Neural Model For In-Process Surface RoughnessDocument10 pagesA Regression Neural Model For In-Process Surface Roughnessem330100% (1)
- Verilog HDLDocument32 pagesVerilog HDLem330No ratings yet
- 3304矿车教材Document30 pages3304矿车教材zlNo ratings yet
- 悍將125 (HB12T、V) 系列零件目錄Document91 pages悍將125 (HB12T、V) 系列零件目錄自由No ratings yet
- JK-8569 Parts BookDocument74 pagesJK-8569 Parts Bookjoe jacksonNo ratings yet
- 桥式起重机啃道受力分析与控制Document6 pages桥式起重机啃道受力分析与控制Jay ChanNo ratings yet