You might also like
- Motion ReportDocument2 pagesMotion Reportmikeb-erau100% (2)
- RFID Based Car Parking SystemDocument27 pagesRFID Based Car Parking SystemKrishna Kant Sashi100% (3)
- Lg938l - Operation & Maintenance ManualDocument114 pagesLg938l - Operation & Maintenance ManualMuhammad Nadim MakhlufNo ratings yet
- ICFYCC Robot for Industrial SafetyDocument8 pagesICFYCC Robot for Industrial SafetyManoj KumarNo ratings yet
- War Field Spying Robot With Night Vision Wireless Camera: Submitted byDocument26 pagesWar Field Spying Robot With Night Vision Wireless Camera: Submitted byankita dhengaleNo ratings yet
- Unique Id Based Smart Car Parking System: Mrs - RevathiDocument32 pagesUnique Id Based Smart Car Parking System: Mrs - Revathikuppala dineshNo ratings yet
- Rfid Security Access Control System: Submitted byDocument20 pagesRfid Security Access Control System: Submitted byVale Conde CuatzoNo ratings yet
- Literature Survey On Automatic Campus CabDocument5 pagesLiterature Survey On Automatic Campus CabGowtham S ShettyNo ratings yet
- File 1406270302Document25 pagesFile 1406270302rupeshNo ratings yet
- Metal Detector Robot Controlled RemotelyDocument25 pagesMetal Detector Robot Controlled RemotelyDarshan ParmarNo ratings yet
- Presented By: Group No:8Document16 pagesPresented By: Group No:8Priyanka TrivediNo ratings yet
- A Project Report On: RF Id Access Control SystemDocument16 pagesA Project Report On: RF Id Access Control Systemharshraj086No ratings yet
- Vehicle Speed Control Using RF CommunicationDocument20 pagesVehicle Speed Control Using RF CommunicationRaina John100% (2)
- Seminar Report On Missile Detection SystemDocument26 pagesSeminar Report On Missile Detection SystemSaurabh SinghNo ratings yet
- SPEED CHECKER FOR HI-WAsYSDocument26 pagesSPEED CHECKER FOR HI-WAsYSAbhinav KumaarNo ratings yet
- GSM Based System Design For Industrial AutomationDocument8 pagesGSM Based System Design For Industrial AutomationAnurag DalviNo ratings yet
- Submitted To: Submitted byDocument13 pagesSubmitted To: Submitted byajayNo ratings yet
- Speed Control with RFID TagsDocument27 pagesSpeed Control with RFID TagsAnonymous L9fB0XUNo ratings yet
- Automatic Cab Signaling System For Rail EnginesDocument20 pagesAutomatic Cab Signaling System For Rail Enginessvijay_790No ratings yet
- Mobile Robot Navigation Using RFDocument6 pagesMobile Robot Navigation Using RFJDNET TECHNOLOGIESNo ratings yet
- Wireless Operated Fire Extinguisher Vehicles With Water Jet SprayDocument25 pagesWireless Operated Fire Extinguisher Vehicles With Water Jet SprayRaushanVijaySinghNo ratings yet
- Hand Gesture Control Robot PDFDocument3 pagesHand Gesture Control Robot PDFMd IrfanNo ratings yet
- LGEC002 Door Lock System Using RFDocument8 pagesLGEC002 Door Lock System Using RFShivani MehrotraNo ratings yet
- WarField Land Rover That Alerts On Sensing Panted Land MinesDocument32 pagesWarField Land Rover That Alerts On Sensing Panted Land MinesPavan KPNo ratings yet
- Android Application Controlled Remote Robot Operation: Under The Guidance ofDocument36 pagesAndroid Application Controlled Remote Robot Operation: Under The Guidance ofAndrew ValentineNo ratings yet
- Supraja DocumentDocument73 pagesSupraja DocumentAnonymous gWVMMa588pNo ratings yet
- Speed Control of Induction Motor by Using IR11Document16 pagesSpeed Control of Induction Motor by Using IR11Anuj TripathiNo ratings yet
- 1) Remote Control Electrical Switch Board.Document6 pages1) Remote Control Electrical Switch Board.Javed KarigarNo ratings yet
- Qa-00447 - Vehicle Accident Prevention Using Eye Blink SensorDocument15 pagesQa-00447 - Vehicle Accident Prevention Using Eye Blink Sensorvasanth sparkNo ratings yet
- Speed Checker To Detect Rash Driving oDocument22 pagesSpeed Checker To Detect Rash Driving oSrikaraniNo ratings yet
- Software For Visually ImpairedDocument19 pagesSoftware For Visually ImpairedRutwik DoleNo ratings yet
- ArthrobotDocument33 pagesArthrobotakshay120No ratings yet
- Wireless Equipment Control Using At89C51: Technical SpecificationsDocument5 pagesWireless Equipment Control Using At89C51: Technical SpecificationsHamed RazaNo ratings yet
- Fire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologyDocument13 pagesFire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologypraveenaNo ratings yet
- Fire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologyDocument13 pagesFire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologypraveenaNo ratings yet
- File 1389426553Document25 pagesFile 1389426553Er Amarsinh RNo ratings yet
- Wireless Ac Motor Speed Control Using RF CommunitionDocument2 pagesWireless Ac Motor Speed Control Using RF CommunitionAnil ReddyNo ratings yet
- Automatic Railway Gate Control SystemDocument10 pagesAutomatic Railway Gate Control SystemKailash Kandpal100% (1)
- Embedded System for Robot ControlDocument13 pagesEmbedded System for Robot Controllucky jNo ratings yet
- Wireless Digital Codelock SystemDocument2 pagesWireless Digital Codelock Systemamitrana86No ratings yet
- Line Following RobotDocument54 pagesLine Following RobotGautam RaaviNo ratings yet
- V7i4 0235Document4 pagesV7i4 0235Irlandi MuhammadNo ratings yet
- Corporate Security SystemDocument8 pagesCorporate Security SystemAshit RathoreNo ratings yet
- Main PPT Speed Control System With Rfid Equipped VehicleDocument27 pagesMain PPT Speed Control System With Rfid Equipped VehicleSujatha GoliNo ratings yet
- Rfid Interface TO 8051: Deepak GuptaDocument4 pagesRfid Interface TO 8051: Deepak Guptamohitdaya14No ratings yet
- Alcohol Detector Mini 1Document29 pagesAlcohol Detector Mini 1Vishal KukrejaNo ratings yet
- PIRMEC PresentationDocument41 pagesPIRMEC PresentationmanuieeeNo ratings yet
- GSM Security SystemDocument5 pagesGSM Security SystemPreru PreranaNo ratings yet
- GSM Security SystemDocument5 pagesGSM Security SystemVivek Chandra YadavNo ratings yet
- Black BoxDocument5 pagesBlack Boxshiyasm_1No ratings yet
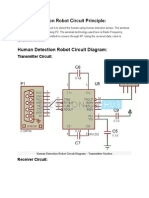
- Human Detection Robot Circuit PrincipleDocument4 pagesHuman Detection Robot Circuit PrincipleAli KhanNo ratings yet
- Gokaraju Rangaraju Institute of Engineering and Technology (Autonomous) Project ReportDocument28 pagesGokaraju Rangaraju Institute of Engineering and Technology (Autonomous) Project ReportJeevan KumarNo ratings yet
- Smart Traffic Control: Divyabharathi.S, Logapriya.V, Karthick.RDocument6 pagesSmart Traffic Control: Divyabharathi.S, Logapriya.V, Karthick.RLogapriya ViswanathanNo ratings yet
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDFrom EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNo ratings yet
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Radio Frequency Transistors: Principles and practical applicationsFrom EverandRadio Frequency Transistors: Principles and practical applicationsRating: 4 out of 5 stars4/5 (3)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- January2016page1to36 Layout 1Document36 pagesJanuary2016page1to36 Layout 1c737No ratings yet
- Devoir 2 Arsalan 2SM BIOFDocument3 pagesDevoir 2 Arsalan 2SM BIOFphytanjaNo ratings yet
- Caterpillar 914GDocument28 pagesCaterpillar 914GForomaquinas100% (3)
- Motorola's TQM Journey to Six Sigma QualityDocument19 pagesMotorola's TQM Journey to Six Sigma QualityKatya Avdieienko100% (1)
- Que Dice Ese Gesto Descargar GratisDocument2 pagesQue Dice Ese Gesto Descargar GratisjavierNo ratings yet
- For Steel Cage Lapping by Using U-ClipDocument4 pagesFor Steel Cage Lapping by Using U-Cliptin aungtunNo ratings yet
- ReleDocument3 pagesRelevitor4santos_6No ratings yet
- Iraqi Code for Reinforced Concrete StructuresDocument71 pagesIraqi Code for Reinforced Concrete Structuresmamandawe50% (2)
- How rock layers are formedDocument3 pagesHow rock layers are formedAlemar AllecerNo ratings yet
- Unit Conversion Heat TransferDocument5 pagesUnit Conversion Heat TransferFamela GadNo ratings yet
- GOT2000 - UserManual Monitor - SH 081196 I PDFDocument614 pagesGOT2000 - UserManual Monitor - SH 081196 I PDFFanny Achmad Hindrarta KusumaNo ratings yet
- Dewatering SystemDocument124 pagesDewatering SystemSpyros NannosNo ratings yet
- Structural Systems Engineering GuideDocument67 pagesStructural Systems Engineering Guidejucar fernandezNo ratings yet
- 50TJDocument56 pages50TJHansen Henry D'souza100% (2)
- Setting vpn1Document10 pagesSetting vpn1Unink AanNo ratings yet
- JU P-Tool Engineering DataDocument1 pageJU P-Tool Engineering Dataazze bouzNo ratings yet
- Fajs FSXDocument8 pagesFajs FSXJunhy Bandeira CassandraNo ratings yet
- Zener DataDocument2 pagesZener Dataapi-27149887No ratings yet
- Lithography GuideDocument29 pagesLithography GuidezanibtahiraNo ratings yet
- Computaris - Top Testing Suite (Quick Demonstration)Document10 pagesComputaris - Top Testing Suite (Quick Demonstration)ioana_diaNo ratings yet
- Ceramic Terminal BlocksDocument1 pageCeramic Terminal BlockselijbbNo ratings yet
- Siemens-Relee de Timp PDFDocument2 pagesSiemens-Relee de Timp PDFChioibasNicolaeNo ratings yet
- Adaptive ArchitectureDocument27 pagesAdaptive ArchitectureSanjeev BumbNo ratings yet
- Wrangling Logs With Logstash and ElasticSearch PresentationDocument38 pagesWrangling Logs With Logstash and ElasticSearch PresentationMohammad Syafiq Bin HussainNo ratings yet
- Struts by Kamalakar DanduDocument237 pagesStruts by Kamalakar DanduKamalakar DanduNo ratings yet
- Quotation 615-4078 BabulalDocument14 pagesQuotation 615-4078 Babulaldevrajan631No ratings yet
- 2022 Manufacture AnswerDocument8 pages2022 Manufacture AnswerChampika V SamarasighaNo ratings yet
- Easygen-3000 Series (Package P1) Genset Control: InterfaceDocument102 pagesEasygen-3000 Series (Package P1) Genset Control: InterfacejinameNo ratings yet