You might also like
- Placas Base Perfil TubularDocument6 pagesPlacas Base Perfil TubularJonathan RubioNo ratings yet
- Tema 14 Cálc Mec TuberíasDocument48 pagesTema 14 Cálc Mec TuberíasRommel ValladaresNo ratings yet
- Proyecto de placa de cimentaciónDocument7 pagesProyecto de placa de cimentaciónJorge Loayza RamosNo ratings yet
- Acero - Diseno de Conexiones de Corte Agosto 09Document16 pagesAcero - Diseno de Conexiones de Corte Agosto 09JaniiiiooooNo ratings yet
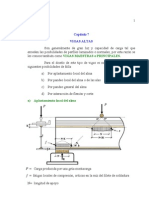
- Cap.7 Vigas AltasDocument63 pagesCap.7 Vigas AltasLissette Segovia MoralesNo ratings yet
- (PDF) 4.-Porticos Especiales A Momento-Smf - CompressDocument63 pages(PDF) 4.-Porticos Especiales A Momento-Smf - Compresssoledad rojas megoNo ratings yet
- Fórmulas prácticas para diseño de placas circulares delgadas con grandes deflexionesDocument20 pagesFórmulas prácticas para diseño de placas circulares delgadas con grandes deflexionesGaston VilchesNo ratings yet
- Diseño de Columnas A Flexion BiaxialDocument1 pageDiseño de Columnas A Flexion BiaxialDorian AranibarNo ratings yet
- Fundacion Equipo VibratorioDocument22 pagesFundacion Equipo VibratoriopeyostailNo ratings yet
- Estudio de Sección Doblemente Armada A FlexiónDocument35 pagesEstudio de Sección Doblemente Armada A Flexiónjoel zapanaNo ratings yet
- Anclajes acero-concreto ACI 318S-08Document318 pagesAnclajes acero-concreto ACI 318S-08mlamourNo ratings yet
- Lineamientos proyecto concreto armadoDocument10 pagesLineamientos proyecto concreto armadoBoby BrownNo ratings yet
- 2.10 - Diseno Por Corte en Viga de Sistema SMFDocument12 pages2.10 - Diseno Por Corte en Viga de Sistema SMFVictor MuñozNo ratings yet
- Diseño Geotecnico y Estructural de Pilote A Cargas Laterales (Arena)Document38 pagesDiseño Geotecnico y Estructural de Pilote A Cargas Laterales (Arena)carlosbelmar.bigNo ratings yet
- Costaneras ExplicadoDocument6 pagesCostaneras ExplicadoRodrigo ManquelafquenNo ratings yet
- AAA Recomend Completo301 1Document239 pagesAAA Recomend Completo301 1Jorge CondoriNo ratings yet
- Conexiones PrecalificadasDocument7 pagesConexiones Precalificadasmedardo77No ratings yet
- Tipsmamposetria Confinadacon EtabsDocument30 pagesTipsmamposetria Confinadacon EtabsMultiproposito MultipropositoNo ratings yet
- Ejemplo de Placa Base A TensiónDocument6 pagesEjemplo de Placa Base A TensiónHenry Pérez CanchéNo ratings yet
- Capitulo 2Document14 pagesCapitulo 2Diiego RuiizNo ratings yet
- 07 Planchas BaseDocument48 pages07 Planchas BaseHelver Fuentes SanchezNo ratings yet
- Conexiones de Plancha Extrema en TubularesDocument7 pagesConexiones de Plancha Extrema en TubularesCassandra WallerNo ratings yet
- Diseño de Muros A FlexocompresionDocument12 pagesDiseño de Muros A FlexocompresionCarlos Alberto Pozo Sabournin100% (1)
- Diseño de miembros en flexión y corteDocument19 pagesDiseño de miembros en flexión y corteRoberth Tandazo PalacioNo ratings yet
- Cálculo de anclajes a posteriori con Profis AnchorDocument45 pagesCálculo de anclajes a posteriori con Profis AnchorManuel100% (1)
- Material Curso EtabsDocument49 pagesMaterial Curso Etabsnorberto fernandezNo ratings yet
- Puente Tipo Viga Losa de Luz 12.00 MDocument31 pagesPuente Tipo Viga Losa de Luz 12.00 MRichar ArosteguiNo ratings yet
- Hormigón Pretensado - FlexiónDocument40 pagesHormigón Pretensado - FlexiónMaria Cecilia Suarez RubiNo ratings yet
- A3 - Ginangeli Mimo - Diseño de Losa de FundacionDocument20 pagesA3 - Ginangeli Mimo - Diseño de Losa de FundacionGinamimoNo ratings yet
- Zapatas AmarradasDocument5 pagesZapatas AmarradasMarianny S. Diaz MejiaNo ratings yet
- Momento Curvatura Sap 2000 v14Document24 pagesMomento Curvatura Sap 2000 v14Dixon Antonio Maradiaga100% (1)
- Diseño de vigas y viguetas en concretoDocument21 pagesDiseño de vigas y viguetas en concretoEdgar PrietoNo ratings yet
- Andres Silva1 PY4Document53 pagesAndres Silva1 PY4AndresSilvaNo ratings yet
- Análisis de sección perfil L 100x100X10Document3 pagesAnálisis de sección perfil L 100x100X10Jesus Jaimes ManceraNo ratings yet
- Conexiones de AceroDocument7 pagesConexiones de Acerojasbleidy lopezNo ratings yet
- 4.adherencia NSR-10Document15 pages4.adherencia NSR-10Ever LeonardoNo ratings yet
- IA - PAA-Ejemplo Tubular A Flexión y Corte-R1Document10 pagesIA - PAA-Ejemplo Tubular A Flexión y Corte-R1luist2483No ratings yet
- LECCIÓN 10 - 1 PLACAS - ModifDocument25 pagesLECCIÓN 10 - 1 PLACAS - ModifPedroAgustínRodríguezIzquierdoNo ratings yet
- Diseño de Porticos Resistentes A Momento en Conc. Armado-R0 PDFDocument28 pagesDiseño de Porticos Resistentes A Momento en Conc. Armado-R0 PDFYoskamGranillaHNo ratings yet
- COLD-ForMED STEEL N6. Propiedades Mecánicas de Secciones Tubulares. AISI MANUAL-08Document8 pagesCOLD-ForMED STEEL N6. Propiedades Mecánicas de Secciones Tubulares. AISI MANUAL-08Angel ManriqueNo ratings yet
- Conexiones de acero atornilladas y soldadasDocument24 pagesConexiones de acero atornilladas y soldadasAndrés Juárez SánchezNo ratings yet
- Formulario Diseño Estructural PDFDocument6 pagesFormulario Diseño Estructural PDFJavier RiverosNo ratings yet
- L Tablas de PerfilesDocument1 pageL Tablas de PerfilesGeorNo ratings yet
- Calculo de Conectores de Corte Colaboracion Parcial - TIPODocument5 pagesCalculo de Conectores de Corte Colaboracion Parcial - TIPOyessica godoyNo ratings yet
- Analisis Modal EspectralDocument13 pagesAnalisis Modal EspectralJunior Armando CanepaNo ratings yet
- Resumen ClasesDocument16 pagesResumen ClasesJoshua AhumadaNo ratings yet
- Proyecto Analisis de Viento en BodegaDocument90 pagesProyecto Analisis de Viento en BodegaJULIA LILIANA REYES FIERRONo ratings yet
- Posgrados Ingeniería Civil análisis diseño estructuralDocument5 pagesPosgrados Ingeniería Civil análisis diseño estructuralCamilo CarvajalNo ratings yet
- Guia-Para-La-Evaluacion-De-La-Resistencia-Al-Fuego-Con-Entrepisos-Metaldeck ACESCO PDFDocument60 pagesGuia-Para-La-Evaluacion-De-La-Resistencia-Al-Fuego-Con-Entrepisos-Metaldeck ACESCO PDFAlex MolinaNo ratings yet
- AISC 341-10 - Chequeo de Seccion Compacta SismicamenteDocument3 pagesAISC 341-10 - Chequeo de Seccion Compacta SismicamenteJoselinNo ratings yet
- Derivadas parciales en coordenadas esféricasDocument6 pagesDerivadas parciales en coordenadas esféricasAlfredo FloresNo ratings yet
- Sec4 Cambio VariableDocument17 pagesSec4 Cambio VariableYerko Benjamín Estrada RomeroNo ratings yet
- ApendiceDocument6 pagesApendicecatalinaNo ratings yet
- Tarea 4MMDocument6 pagesTarea 4MMEmmanuel S. JimenezNo ratings yet
- 1 4 B 5Document4 pages1 4 B 5maximiliano_zambriniNo ratings yet
- BcorregidoDocument7 pagesBcorregidoGabriel Alfonso Alvarado FigueroaNo ratings yet
- Curso de cálculo vectorial: Introducción a las coordenadas polaresDocument14 pagesCurso de cálculo vectorial: Introducción a las coordenadas polaresDIANA GOMEZNo ratings yet
- Catalogo Tecnico Esparragos y BulonesDocument131 pagesCatalogo Tecnico Esparragos y BulonesDamian LeonardoNo ratings yet
- Aceros Aleados Alta TempDocument1 pageAceros Aleados Alta Tempmatiasruiz78No ratings yet
- Cirsoc 301 05Document273 pagesCirsoc 301 05matiasruiz78No ratings yet
- Accesorios OutletsDocument7 pagesAccesorios OutletsOscar David Benavides CastilloNo ratings yet
- El Derecho InformaticoDocument6 pagesEl Derecho InformaticoProgrms LunaNo ratings yet
- 2022 Matriz de Incidentes Críticos y RúbricaDocument4 pages2022 Matriz de Incidentes Críticos y RúbricaRodrigo Núñez VargasNo ratings yet
- Biografía relámpago de BelzuDocument367 pagesBiografía relámpago de BelzuRodrigo H Chaparro Montaña100% (2)
- TAREA OO1 SenatiDocument10 pagesTAREA OO1 Senatijair100% (7)
- Estandar SH de Reporte e Investigacion de Incidentes - 1sep15 SPDocument21 pagesEstandar SH de Reporte e Investigacion de Incidentes - 1sep15 SPJorgeNo ratings yet
- CUADERNILLO - 03 - Líos Entre Letras ProfesorDocument18 pagesCUADERNILLO - 03 - Líos Entre Letras ProfesorCUMBRES CHETUMALNo ratings yet
- Novocentro Final FinalDocument72 pagesNovocentro Final FinalLiz BalbinNo ratings yet
- Mapa Mental Comunicacion EscritaDocument1 pageMapa Mental Comunicacion EscritaJenny Esperanza Prieto Pulido0% (1)
- Text GobDocument36 pagesText GobGabriel Fabricio Rojas SalazarNo ratings yet
- Codigo de Etica Docente MejoradoDocument7 pagesCodigo de Etica Docente Mejoradoviki matos50% (2)
- Revista Anthropologika Año 1 Numero 1Document264 pagesRevista Anthropologika Año 1 Numero 1api-3720098100% (2)
- Schumpeter, Joseph, Diez Grandes Economistas. Capítulo 4Document23 pagesSchumpeter, Joseph, Diez Grandes Economistas. Capítulo 4Ricardo RamírezNo ratings yet
- 11-1. CyT Elabormos Compost en FamiliaDocument7 pages11-1. CyT Elabormos Compost en FamiliaRudi Rosales HuarocoNo ratings yet
- 4.4.1 Modelo de MintzbergDocument8 pages4.4.1 Modelo de MintzbergLizbeth GaliciaNo ratings yet
- FrankensteinDocument6 pagesFrankensteinhectormontero18No ratings yet
- Biólogos de HondurasDocument10 pagesBiólogos de HondurasBenigno Reyes LagosNo ratings yet
- Atención de enfermería en la Universidad Politécnica Estatal del CarchiDocument3 pagesAtención de enfermería en la Universidad Politécnica Estatal del CarchiAislyn GuerronNo ratings yet
- Reglamento de Transito Del Municipio Libre de San Luis Potosi PDFDocument85 pagesReglamento de Transito Del Municipio Libre de San Luis Potosi PDFPorfilio Slp50% (2)
- Guia Basica MinecraftDocument3 pagesGuia Basica MinecraftEduardo ContrerasNo ratings yet
- Historia Del Diseño Gráfico Parcial 1 GavitoDocument13 pagesHistoria Del Diseño Gráfico Parcial 1 GavitoFelipeNavarroNo ratings yet
- Estadística inferencial: Importancia del muestreo en investigaciónDocument10 pagesEstadística inferencial: Importancia del muestreo en investigaciónKenverth Mvm67% (3)
- Ah 51Document98 pagesAh 51Vanessa Rodriguez100% (1)
- La Cuenca Petrolífera Del Lago de MaracaiboDocument50 pagesLa Cuenca Petrolífera Del Lago de MaracaiboLuisaVillamizar100% (1)
- Unidad 1 RefrigeracionDocument16 pagesUnidad 1 RefrigeracionNuñez Zamora IrvingNo ratings yet
- Guion de Ciudadania GlobalDocument3 pagesGuion de Ciudadania GlobalJoel bocanegraNo ratings yet
- Writing FceDocument6 pagesWriting FceFonsi Arc Rs100% (1)
- Clasificación factores riesgo químicosDocument90 pagesClasificación factores riesgo químicosOscar SotoNo ratings yet
- Diágnóstico ArtesaníaDocument27 pagesDiágnóstico ArtesaníaDesco Programa Selva CentralNo ratings yet
- Sombra Del ParaísoDocument26 pagesSombra Del ParaísoAleALNo ratings yet
- Programación General AnualDocument68 pagesProgramación General AnualCEIP PABLO PICASSONo ratings yet