You might also like
- Cuaderno de actividades prácticas en neurofacilitaciónFrom EverandCuaderno de actividades prácticas en neurofacilitaciónNo ratings yet
- Guía de atención a personas con trauma raquimedular cervical: Enfoque desde la terapia ocupacionalFrom EverandGuía de atención a personas con trauma raquimedular cervical: Enfoque desde la terapia ocupacionalNo ratings yet
- Control MotorDocument50 pagesControl MotorRodrigo Muñoz Caroca85% (13)
- BobathDocument79 pagesBobathOmar Alvarado Ibarra100% (4)
- Bobath PediatricoDocument25 pagesBobath PediatricoEstrada JesusNo ratings yet
- TestValoracion-Fisiot PediatriaDocument5 pagesTestValoracion-Fisiot PediatriaAlba Gimeno ViudezNo ratings yet
- AlbertaDocument25 pagesAlbertaEduardo Figueroa100% (2)
- Control y Aprendizaje MotorDocument35 pagesControl y Aprendizaje MotorTamara Rojas JadueNo ratings yet
- Bobath Evaluacion y Tto 2020Document78 pagesBobath Evaluacion y Tto 2020javier andrade100% (1)
- Tecnicas en Neurorehabilitacion Que Se Emplean en El Control PosturalDocument14 pagesTecnicas en Neurorehabilitacion Que Se Emplean en El Control PosturalJefferAronesNo ratings yet
- Clase 8 Modelo Control MotorDocument34 pagesClase 8 Modelo Control MotorMakarena Diaz AlfaroNo ratings yet
- Concepto Le MétayerDocument4 pagesConcepto Le MétayerJose Alberto GarciaNo ratings yet
- Teorias Sobre El Control MotorDocument49 pagesTeorias Sobre El Control MotorRobertinaota100% (2)
- Expo KatonaDocument23 pagesExpo KatonaArmando Rodríguez GómezNo ratings yet
- Síndrome Hipotónico PDFDocument42 pagesSíndrome Hipotónico PDFSaul Yerena100% (3)
- GMFM TraducidoDocument3 pagesGMFM TraducidoGina HuamaniNo ratings yet
- El Concepto Bobath (Libro Capitulo 1)Document17 pagesEl Concepto Bobath (Libro Capitulo 1)Soli CasDe100% (1)
- Introduccion A La Fisioterapia Neurologica e InfantilDocument12 pagesIntroduccion A La Fisioterapia Neurologica e InfantilESTHER MARTINEZNo ratings yet
- Métodos de Rehabilitación en PCIDocument19 pagesMétodos de Rehabilitación en PCILety CatariNo ratings yet
- Clasificación de La Paralisis CerebralDocument3 pagesClasificación de La Paralisis Cerebralmaría picoNo ratings yet
- Alteraciones Del Tono MuscularDocument34 pagesAlteraciones Del Tono MuscularConsultec Paraguay80% (5)
- Neurodesarrollo - Concepto BobathDocument24 pagesNeurodesarrollo - Concepto BobathCandee MartinuzziNo ratings yet
- Metodo BobathDocument14 pagesMetodo Bobathsomar1967No ratings yet
- Paralisis Cerebral y HemiparesiaDocument47 pagesParalisis Cerebral y HemiparesiaYesenia OchoaNo ratings yet
- Eva Neurokine en PCDocument48 pagesEva Neurokine en PCFernanda PuellesNo ratings yet
- Tema 14. Terapia Ocupacional en La Parálisis Cerebral InfantilDocument51 pagesTema 14. Terapia Ocupacional en La Parálisis Cerebral InfantilAracely Morales100% (1)
- "Rehabilitación en Pacientes Con Lesiones Medulares".: Ekyf Escuela de Kinesiología Y Fisioterapia/FCMDocument63 pages"Rehabilitación en Pacientes Con Lesiones Medulares".: Ekyf Escuela de Kinesiología Y Fisioterapia/FCMMaryRuiz100% (1)
- VOJTADocument46 pagesVOJTAYAZMINNo ratings yet
- Metodo TardieuDocument20 pagesMetodo TardieuPaul Santiago25% (4)
- Le MetayerDocument46 pagesLe MetayerMiguel González VázquezNo ratings yet
- Hipotonía e HipertoníaDocument21 pagesHipotonía e HipertoníaSandra Soledad Rosas Saavedra50% (2)
- Balance y Propiocepcion Claudio OyarzoDocument8 pagesBalance y Propiocepcion Claudio Oyarzoburgoschile100% (2)
- Modelo Control Motor en PediatríaDocument10 pagesModelo Control Motor en PediatríaFranciscaNo ratings yet
- Clase 2. Desarrollo PsicomotorDocument68 pagesClase 2. Desarrollo PsicomotorFiorella Chambi100% (1)
- Manual de Fabricacion de Ayudas Tecnicas y Asistencias Tecnologicas A Bajo CostoDocument56 pagesManual de Fabricacion de Ayudas Tecnicas y Asistencias Tecnologicas A Bajo CostoDarien Soriano100% (1)
- Control MotorDocument27 pagesControl Motorsarah100% (1)
- TFG Metodo Le Métayer, Tratamiento de La Paralisis Cerebral Infantal (Revision Bibliografica) PDFDocument47 pagesTFG Metodo Le Métayer, Tratamiento de La Paralisis Cerebral Infantal (Revision Bibliografica) PDFDigoDiegoBuendia100% (2)
- KatonaDocument5 pagesKatonaDarknien ST100% (1)
- Reacciones PosturalesDocument35 pagesReacciones PosturalesCLAUDIANo ratings yet
- Sistema de Clasificación de La Función Motora GruesaDocument11 pagesSistema de Clasificación de La Función Motora GruesaMIGCELI XIOMARA OXSA BRAÑEZNo ratings yet
- Desarrollo Desde El Neonato Hasta Los Doce MesesDocument7 pagesDesarrollo Desde El Neonato Hasta Los Doce MesesMarySol VaLencia100% (1)
- Modelo NeurodesarrolloDocument20 pagesModelo NeurodesarrolloClaudia TorrijosNo ratings yet
- METODO BrunnstromDocument2 pagesMETODO BrunnstromCecilia Montes100% (1)
- Marco de Referencia Control MotorDocument21 pagesMarco de Referencia Control MotorMaría Fernanda Villaseca0% (1)
- Método PerfettiDocument10 pagesMétodo PerfettiPablo A Hernandez GonzalezNo ratings yet
- Escala Motora Del Infante de Alberta AIMSDocument53 pagesEscala Motora Del Infante de Alberta AIMStecnicas neuroNo ratings yet
- Desarrollo Del Control PosturalDocument36 pagesDesarrollo Del Control PosturalEduardo Quezada Venegas0% (1)
- PC EspasticaaaDocument44 pagesPC EspasticaaasairaNo ratings yet
- c6 Control MotorDocument50 pagesc6 Control Motorabby100% (2)
- Le MetayerDocument229 pagesLe MetayerAna Isabel100% (1)
- Control Motor BobathDocument39 pagesControl Motor Bobathフェルナンダ マリア100% (4)
- Resumen Capitulo 3 Fisologia Del Control MotorDocument8 pagesResumen Capitulo 3 Fisologia Del Control MotorCatalina Mahecha CubillosNo ratings yet
- VojtaDocument15 pagesVojtaKarolina Quintana HermosillaNo ratings yet
- VojtaDocument72 pagesVojtaFridza AB100% (3)
- Guía Parálisis Cerebral. FinalDocument40 pagesGuía Parálisis Cerebral. FinalAngiiB MuñozNo ratings yet
- Modelo Control Motor y NeurodesarrolloDocument9 pagesModelo Control Motor y NeurodesarrolloDominique PonceNo ratings yet
- Fundamentos Básicos de Neurorrehabilitación (Autoguardado)Document12 pagesFundamentos Básicos de Neurorrehabilitación (Autoguardado)Perla Rojas BetancourtNo ratings yet
- Integración Sensorial en Niños Con PCDocument16 pagesIntegración Sensorial en Niños Con PCsk9703No ratings yet
- 2002 Tratamiento y Rehabilitación de Las Lesiones de Los Nervios PeriféricosDocument15 pages2002 Tratamiento y Rehabilitación de Las Lesiones de Los Nervios PeriféricosManuel StangeNo ratings yet
- BOBATHDocument32 pagesBOBATHCarolinaLlamasSalas100% (2)
- Trabajo Práctico 1Document11 pagesTrabajo Práctico 1Paula Ximena PazosNo ratings yet
- Terapia Familiar Sistémica. Bases Teóricas y EscuelasDocument26 pagesTerapia Familiar Sistémica. Bases Teóricas y EscuelasClaudia Perez RosasNo ratings yet
- Guión InstruccionalDocument15 pagesGuión InstruccionalAlex VikezNo ratings yet
- TGS 2014 PDFDocument5 pagesTGS 2014 PDFWillian RiveraNo ratings yet
- Proyecto de TifDocument17 pagesProyecto de TifirinaNo ratings yet
- Trabajo FinalDocument8 pagesTrabajo FinalMaría Camila JaimesNo ratings yet
- Investiga2 PDFDocument100 pagesInvestiga2 PDFNery CarolinaNo ratings yet
- Honneth - La Lucha Por El ReconocimientoDocument48 pagesHonneth - La Lucha Por El ReconocimientoToni Rizolo BurgosNo ratings yet
- RA1 El Signo Lingüístico y La ComunicaciónDocument17 pagesRA1 El Signo Lingüístico y La Comunicación'Salvador Rojas'No ratings yet
- Bases de La Epistemología A Comienzos Del Siglo XxiDocument23 pagesBases de La Epistemología A Comienzos Del Siglo XxiAnderCollantesNo ratings yet
- Estrategias para Enseñar y Aprender A Pensar Rosa LDocument38 pagesEstrategias para Enseñar y Aprender A Pensar Rosa LOliver-io GonzálezNo ratings yet
- Ensayo de El Hombre y El Mono Psicologia ComparadaDocument8 pagesEnsayo de El Hombre y El Mono Psicologia ComparadaAlpuing Margarita Xcitlaly0% (1)
- Programa Mision SucreDocument17 pagesPrograma Mision SucreRuben ReverolNo ratings yet
- Didactica PDFDocument158 pagesDidactica PDFguata2603gmailcomNo ratings yet
- Planificación Microempresa de AlmohadasDocument9 pagesPlanificación Microempresa de AlmohadasdanielaNo ratings yet
- Counselling - BermejoDocument376 pagesCounselling - BermejoHenrry Chack100% (1)
- Diferencias Entre Autoconcepto y AutoestimaDocument121 pagesDiferencias Entre Autoconcepto y AutoestimaRichard Ismael Jimenez LabajosNo ratings yet
- Actividad # 7Document5 pagesActividad # 7Jimmy Arley AGUDELO SALAZARNo ratings yet
- Modelo de Ocupación Humana 2011Document15 pagesModelo de Ocupación Humana 2011Javier Ignacio Aravena Sanhueza100% (2)
- 1 GLOSARIO Perspectivas AdministraciónDocument2 pages1 GLOSARIO Perspectivas Administracióntitoazed100% (1)
- Etica y ValoresDocument6 pagesEtica y ValoresAnonymous D3RnJG1sNo ratings yet
- Emociones e InstintosDocument3 pagesEmociones e InstintosAlexander MarcoNo ratings yet
- Tecnicas ProyectivasDocument3 pagesTecnicas ProyectivasjekitaNo ratings yet
- Abraham H. Maslow - La Amplitud de La Naturaleza Humana PDFDocument202 pagesAbraham H. Maslow - La Amplitud de La Naturaleza Humana PDFjacoscarabal86% (14)
- Cap 2 ResumenDocument12 pagesCap 2 ResumenFrancisca Salinas VenegasNo ratings yet
- Influencia de Las Emociones en La Toma de DecisionesDocument10 pagesInfluencia de Las Emociones en La Toma de Decisionesalejandra rodriguezNo ratings yet
- Resiliencia Clase - CreatividadDocument30 pagesResiliencia Clase - CreatividadNatalia BellosiNo ratings yet
- El Desarrollo Psicomotor y El Cuidado Del Cuerpo El Desarrollo Psicomotor y El Aprender a Cuidarse Para Mantener Una Buena Salud Física y Emocional Son Aspectos Importantes en La Formación Integral de Los NiñosDocument2 pagesEl Desarrollo Psicomotor y El Cuidado Del Cuerpo El Desarrollo Psicomotor y El Aprender a Cuidarse Para Mantener Una Buena Salud Física y Emocional Son Aspectos Importantes en La Formación Integral de Los NiñosNidiaGiovannaAlvaradoHuallullo100% (1)
- Demanda de DineroDocument15 pagesDemanda de DineroChristianDiestraBulnesNo ratings yet
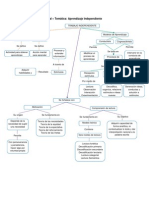
- Mapa Conceptual - Temática: Aprendizaje IndependienteDocument3 pagesMapa Conceptual - Temática: Aprendizaje IndependienteYuli M. DiazNo ratings yet