You might also like
- McCormick X60 Series (2011-2014) - RP67 - X60.50 Tractor Service Repair Manual PDFDocument25 pagesMcCormick X60 Series (2011-2014) - RP67 - X60.50 Tractor Service Repair Manual PDFfjkkekmdmNo ratings yet
- Forward KinematicsDocument4 pagesForward KinematicsZafer Gök100% (1)
- HHT Alpha MethodDocument22 pagesHHT Alpha MethodSasi Sudhahar ChinnasamyNo ratings yet
- Hiab 320Document152 pagesHiab 320Jasbir Jammu Repairing & Maintence LLCNo ratings yet
- Body Bulder Guide New GIGADocument272 pagesBody Bulder Guide New GIGAMuhammad Hanif FuadiNo ratings yet
- Matrix ConverterDocument41 pagesMatrix ConverterHoài Nam100% (1)
- Quantum Computing For Computer Scientists (PDFDrive - Com) (092-120)Document29 pagesQuantum Computing For Computer Scientists (PDFDrive - Com) (092-120)Johann Steven BogotàNo ratings yet
- Material 5 - Time Domain Response Analysis-1Document6 pagesMaterial 5 - Time Domain Response Analysis-1Ninggar TitanNo ratings yet
- Linear System Theory: Controllable, Uncontrollable, Observable and Unobservable.Document13 pagesLinear System Theory: Controllable, Uncontrollable, Observable and Unobservable.Thanh NguyenNo ratings yet
- Mathematical Modeling of 1st and 2nd Order Systems in MATLABDocument7 pagesMathematical Modeling of 1st and 2nd Order Systems in MATLABAbdul Rehman AfzalNo ratings yet
- Asymptotic properties of solutions to hyperbolic equationsDocument10 pagesAsymptotic properties of solutions to hyperbolic equationsDandi BachtiarNo ratings yet
- Center Manifold ReductionDocument8 pagesCenter Manifold Reductionsunoval2013100% (2)
- Control System TMADocument19 pagesControl System TMAIdiots IdiotssNo ratings yet
- StabilityDocument8 pagesStabilityGianco VillarrealNo ratings yet
- HW2 PDFDocument4 pagesHW2 PDFAshishNo ratings yet
- XT Atxt TT: Systems & Control Theory Systems & Control TheoryDocument12 pagesXT Atxt TT: Systems & Control Theory Systems & Control TheoryWilber PinaresNo ratings yet
- Adrc Arm ControlDocument12 pagesAdrc Arm ControlSaurabh SinghNo ratings yet
- CH-3-Multiple Linear RegressionDocument13 pagesCH-3-Multiple Linear Regressiongenetg428No ratings yet
- EE 8950 - Homework 3Document4 pagesEE 8950 - Homework 3euclid cloudNo ratings yet
- ReportDocument4 pagesReportNathan ParsonsNo ratings yet
- Elasticity ME5413-Lecture1Document36 pagesElasticity ME5413-Lecture1Parag AhsanNo ratings yet
- hw10 2021solsDocument28 pageshw10 2021solsluigui123No ratings yet
- Paper 23-A New Type Method For The Structured Variational Inequalities ProblemDocument4 pagesPaper 23-A New Type Method For The Structured Variational Inequalities ProblemEditor IJACSANo ratings yet
- Co-Simulation Control of Robot Arm Dynamics in ADAMS and MATLABDocument6 pagesCo-Simulation Control of Robot Arm Dynamics in ADAMS and MATLABMarlon Andres Cajamarca VegaNo ratings yet
- C5.MDOF1 Compatibility Mode PDFDocument16 pagesC5.MDOF1 Compatibility Mode PDFArThur BangunNo ratings yet
- The Structure of Determining Matrices For Single-Delay Autonomous Linear Neutral Control SystemsDocument17 pagesThe Structure of Determining Matrices For Single-Delay Autonomous Linear Neutral Control SystemsinventionjournalsNo ratings yet
- DIGITAL CONTROL SYSTEM STATE SPACE EQUATIONSDocument19 pagesDIGITAL CONTROL SYSTEM STATE SPACE EQUATIONSAmad ALiNo ratings yet
- SISO Feedback LinearizationDocument24 pagesSISO Feedback LinearizationTarek BmrNo ratings yet
- Test in Automatics at DistanceDocument1 pageTest in Automatics at DistanceImane ShaqirNo ratings yet
- Tutorial 2-3. ContentsDocument20 pagesTutorial 2-3. ContentsjawaidaligNo ratings yet
- Analysis of Three-Freedom Degree SystemDocument31 pagesAnalysis of Three-Freedom Degree SystemIsnardo CadenaNo ratings yet
- Fuzzy Sliding Mode Control and EKF for Noisy Chemical ReactorsDocument7 pagesFuzzy Sliding Mode Control and EKF for Noisy Chemical ReactorsHildebrando CastroNo ratings yet
- Lab 2Document16 pagesLab 2KINGS entertainment KHANNo ratings yet
- RevisedDocument6 pagesRevisedPaulina MarquezNo ratings yet
- QendrueshmeriDocument11 pagesQendrueshmeriPune InxhiniereshNo ratings yet
- Lecture 13 Ece4330tDocument54 pagesLecture 13 Ece4330tHamza AteeqNo ratings yet
- UCK 363E Automatic Control II Lecture Notes 10 State Space Control of Servo Mechanism Linear Quadratic Regulator (LQR) Control DesignDocument6 pagesUCK 363E Automatic Control II Lecture Notes 10 State Space Control of Servo Mechanism Linear Quadratic Regulator (LQR) Control DesignCeren DENİZNo ratings yet
- Hasbun PosterDocument21 pagesHasbun PosterSuhailUmarNo ratings yet
- LagrangeDocument16 pagesLagrangeMuhammad AdnanNo ratings yet
- Lab 03 Simulink 2018 Part 2Document12 pagesLab 03 Simulink 2018 Part 2Reem GheithNo ratings yet
- Frequency-Adaptive Current ControlDocument11 pagesFrequency-Adaptive Current ControlRizka BimartaNo ratings yet
- Natural Frequency Analysis of Multi-Degree SystemsDocument87 pagesNatural Frequency Analysis of Multi-Degree SystemswanpudinNo ratings yet
- Lecture 3 Kinematic ManipulatorDocument8 pagesLecture 3 Kinematic ManipulatorRamkumar RamaiahNo ratings yet
- Exposicion Ejercicio 3-3 y 3-5.Document15 pagesExposicion Ejercicio 3-3 y 3-5.Eliana Castillo Vergara0% (2)
- Kinematics and Dynamics of Lower Body of Autonomous Humanoid Biped RobotDocument6 pagesKinematics and Dynamics of Lower Body of Autonomous Humanoid Biped RobotDeepak BharadwajNo ratings yet
- MDOF Structural Vibration ModesDocument52 pagesMDOF Structural Vibration ModesHalil ZeyrekNo ratings yet
- Fuzzy Adaptive H Control For A Class of Nonlinear SystemsDocument6 pagesFuzzy Adaptive H Control For A Class of Nonlinear SystemsnguyenquangduocNo ratings yet
- SSA Beginners Guide v9Document22 pagesSSA Beginners Guide v9viktor6No ratings yet
- Phys 101 - Chapter-V (1) ..Document27 pagesPhys 101 - Chapter-V (1) ..MD NAYM MIANo ratings yet
- Mechanics of Solids Week 10 LecturesDocument9 pagesMechanics of Solids Week 10 LecturesFlynn GouldNo ratings yet
- Chapter 2Document44 pagesChapter 2محمد فائزNo ratings yet
- Stability analysis and LMI conditionsDocument4 pagesStability analysis and LMI conditionsAli DurazNo ratings yet
- Load Flow - 3 - 2Document13 pagesLoad Flow - 3 - 2rauf2063036No ratings yet
- 7 - Analysis Based On State SpaceDocument44 pages7 - Analysis Based On State SpaceJosueNo ratings yet
- T6lekk Mmbmro HF1 PDFDocument11 pagesT6lekk Mmbmro HF1 PDFBenci MonoriNo ratings yet
- System Simulation Using Matlab, State Plane PlotsDocument7 pagesSystem Simulation Using Matlab, State Plane PlotsmosictrlNo ratings yet
- 1 s2.0 S0895717710001743 MainDocument7 pages1 s2.0 S0895717710001743 MainAhmad DiabNo ratings yet
- m4l30 Lesson 30 The Direct Stiffness Method: Plane FramesDocument23 pagesm4l30 Lesson 30 The Direct Stiffness Method: Plane FramesVitor Vale100% (1)
- Bhoumik - Econ 7800 - PS3Document7 pagesBhoumik - Econ 7800 - PS3Lopa BhowmikNo ratings yet
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Matrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")From EverandMatrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Rating: 3 out of 5 stars3/5 (4)
- Basics of Pumps Training ModuleDocument54 pagesBasics of Pumps Training ModulesuprateemNo ratings yet
- PSXX OMR0002 PDFDocument64 pagesPSXX OMR0002 PDFLupeNo ratings yet
- CYTJ45-2 Specification - KAMACH 18UDocument8 pagesCYTJ45-2 Specification - KAMACH 18UJhonatan rincon martinezNo ratings yet
- Chapter-1, Simple StressDocument71 pagesChapter-1, Simple Stresssherlockhisham100% (2)
- Sachin Solanki CNC/IPC/13 Summary SupportDocument61 pagesSachin Solanki CNC/IPC/13 Summary Supportshivam modanwalNo ratings yet
- Unrestrained Beam With End MomentsDocument9 pagesUnrestrained Beam With End MomentsNikos StathoulopoulosNo ratings yet
- Adjusting Max Displacement HPR-02Document3 pagesAdjusting Max Displacement HPR-02ArleyTrujillo1224No ratings yet
- IEA A43 PR2 A16 Reference Cooling Tower EES Model CASJL PhAJL080108Document6 pagesIEA A43 PR2 A16 Reference Cooling Tower EES Model CASJL PhAJL080108saeedalipourNo ratings yet
- Newco Product Line BrochureDocument8 pagesNewco Product Line BrochureshahganNo ratings yet
- Astm A788Document10 pagesAstm A788Lucas Prezotto Puertas ErnandesNo ratings yet
- (Datasheet) Eriks - Ketron Peek-1000Document2 pages(Datasheet) Eriks - Ketron Peek-1000Carlos AlbertoNo ratings yet
- Catalogo Aurora PneumaticDocument84 pagesCatalogo Aurora PneumaticSam MarmorNo ratings yet
- Bagatelle Showroom Structural AnalysisDocument15 pagesBagatelle Showroom Structural AnalysisDhiraj BeechooNo ratings yet
- Carbs 101Document5 pagesCarbs 101Ashwin KumarNo ratings yet
- Manual NovaturnDocument86 pagesManual NovaturnVictor SerranoNo ratings yet
- Die Casting Machines Core Pins & Ejector PinsDocument1 pageDie Casting Machines Core Pins & Ejector PinsJayden BarnesNo ratings yet
- Characteristics of the Hydraulic Jump LabDocument10 pagesCharacteristics of the Hydraulic Jump LabnaeemNo ratings yet
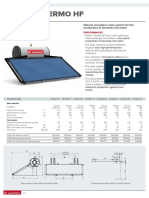
- Kairos Thermo HF Natural Circulation Solar System for Domestic Hot Water ProductionDocument4 pagesKairos Thermo HF Natural Circulation Solar System for Domestic Hot Water ProductionFILID MADNo ratings yet
- Steam Turbines Basic Information - Power Generation in PakistanDocument12 pagesSteam Turbines Basic Information - Power Generation in Pakistannomi607No ratings yet
- EmDocument6 pagesEmGonzalo Antonio Mamani PayeNo ratings yet
- AUMA, Assembly InstructionsDocument2 pagesAUMA, Assembly InstructionsGordinhorsNo ratings yet
- 06 Instructions Manual Hagglunds Eximtec - CEI CollahuasiDocument261 pages06 Instructions Manual Hagglunds Eximtec - CEI CollahuasiJorge RiveraNo ratings yet
- 4 UreviewDocument34 pages4 Ureviewumchemist2No ratings yet
- STM WDocument18 pagesSTM WEdgardo GambandeNo ratings yet
- Form Forecast Order Tools Ahass 2020Document9 pagesForm Forecast Order Tools Ahass 2020Ahass Sukomoro MotorNo ratings yet
- WinPet BrochureDocument2 pagesWinPet BrochureTamil KumarNo ratings yet
- Spigot Product Spec Sheet 1614023137Document1 pageSpigot Product Spec Sheet 1614023137Cojuhari SergiuNo ratings yet