You might also like
- MatlabDocument48 pagesMatlabMayur RamavatNo ratings yet
- MainDocument342 pagesMainchipulinoNo ratings yet
- Fortran ProgramDocument9 pagesFortran ProgramSandip PaulNo ratings yet
- Fourier Series PDFDocument15 pagesFourier Series PDFVemula RamakrishnareddyNo ratings yet
- Numerical Analysis SolutionDocument19 pagesNumerical Analysis SolutionPradip AdhikariNo ratings yet
- Practical guide to solving real-life optimal control problemsDocument39 pagesPractical guide to solving real-life optimal control problemschaitanya_awast9336No ratings yet
- Newton Gauss MethodDocument37 pagesNewton Gauss MethodLucas WeaverNo ratings yet
- Newton's Divided Difference Interpolation FormulaDocument31 pagesNewton's Divided Difference Interpolation FormulaAnuraj N VNo ratings yet
- Mathworks Matlab7 - Toolbox - System Identification Toolbox User's GuideDocument566 pagesMathworks Matlab7 - Toolbox - System Identification Toolbox User's Guideturgaykale100% (1)
- Gec220 Lecture 2 Total Differential Chain Rule Implicit Function PDFDocument14 pagesGec220 Lecture 2 Total Differential Chain Rule Implicit Function PDFnyenookeNo ratings yet
- Finite-Element Method For Elastic Wave PropagationDocument10 pagesFinite-Element Method For Elastic Wave Propagationbahar1234No ratings yet
- Circular Tank Radius CalculationDocument25 pagesCircular Tank Radius CalculationQamar AbbasNo ratings yet
- 8 OdesDocument86 pages8 Odesprashanthreddy26No ratings yet
- Difference Between DFS and BFS ExplainedDocument14 pagesDifference Between DFS and BFS Explainedranadip dasNo ratings yet
- Octave Programming and Linear AlgebraDocument17 pagesOctave Programming and Linear AlgebraVictor MiclovichNo ratings yet
- Mscthesis Matlab CodeDocument80 pagesMscthesis Matlab CodecentkiloNo ratings yet
- Reynolds - Ordinary and Partial Differential EquationsDocument416 pagesReynolds - Ordinary and Partial Differential Equationsjoepcr64100% (1)
- MATLAB App BuildingDocument490 pagesMATLAB App Building胡小波No ratings yet
- Advanced Engineering Math SolutionsDocument7 pagesAdvanced Engineering Math Solutionsblazinlyfe42No ratings yet
- Introduction To MATLAB For Engineers, Third Edition: An Overview of MATLABDocument47 pagesIntroduction To MATLAB For Engineers, Third Edition: An Overview of MATLABSeyed SadeghNo ratings yet
- Fortran Program For Solving 2Document15 pagesFortran Program For Solving 2Abhijit Kushwaha100% (1)
- Introduction To MatlabDocument286 pagesIntroduction To MatlabXxbugmenotxXNo ratings yet
- Soil Moisture Sensor Calibration Procedure SenzMateDocument6 pagesSoil Moisture Sensor Calibration Procedure SenzMateShan SangarNo ratings yet
- Multistep Methods: Appendix IDocument24 pagesMultistep Methods: Appendix Imukarram169No ratings yet
- MATLAB Code For Digital Modulation TechniquesDocument10 pagesMATLAB Code For Digital Modulation TechniqueshariharankalyanNo ratings yet
- Example of Hessenberg ReductionDocument21 pagesExample of Hessenberg ReductionMohammad Umar RehmanNo ratings yet
- Fluid ProjectDocument45 pagesFluid ProjectDhiraj Nayak0% (1)
- Problems Chaptr 1 PDFDocument4 pagesProblems Chaptr 1 PDFcaught inNo ratings yet
- Measuring The Coefficient of Restitution of A Table Tennis BallDocument8 pagesMeasuring The Coefficient of Restitution of A Table Tennis BallEd Moss100% (1)
- 2D Lid Diven Cavity Final Report PDFDocument24 pages2D Lid Diven Cavity Final Report PDFVivek JoshiNo ratings yet
- Applied Linear Algebra and Differential EquationsDocument143 pagesApplied Linear Algebra and Differential EquationsJohn ChanNo ratings yet
- MIKE11 UserManualDocument544 pagesMIKE11 UserManualcioranu_ion100% (1)
- Unit 4: Linear Transformation: V T U T V U T U CT Cu TDocument28 pagesUnit 4: Linear Transformation: V T U T V U T U CT Cu TFITSUM SEIDNo ratings yet
- Differentiation Methods With Numerical Computing and Python Programming Language.12Document13 pagesDifferentiation Methods With Numerical Computing and Python Programming Language.1248MUHAMMAD ARIEF MULYANANo ratings yet
- Numerical Methods To Solve Systems of Equations in PythonDocument12 pagesNumerical Methods To Solve Systems of Equations in Pythontheodor_munteanuNo ratings yet
- Applied Linear Algebra Solutions Errata (Olver)Document3 pagesApplied Linear Algebra Solutions Errata (Olver)Lisha50% (2)
- Digital Signal Processing: Solved HW For Day 9Document20 pagesDigital Signal Processing: Solved HW For Day 9Cuau SuarezNo ratings yet
- 6002 Notes 07 L16Document27 pages6002 Notes 07 L16Mandar PatilNo ratings yet
- Homework Solutions - MATLABDocument27 pagesHomework Solutions - MATLABachuethNo ratings yet
- Partial Differential Equations in MATLAB 7.0Document28 pagesPartial Differential Equations in MATLAB 7.0ah_madadiNo ratings yet
- Crank Nicolson MethodDocument4 pagesCrank Nicolson MethodSankhaNo ratings yet
- Least Square Equation SolvingDocument22 pagesLeast Square Equation Solvingnguyen_anh_126No ratings yet
- Math2069 Lecture NotesDocument204 pagesMath2069 Lecture NotesJonathan SkeltonNo ratings yet
- Nonlinear Systems - Newton MethodDocument4 pagesNonlinear Systems - Newton MethodFadel AlfarouqNo ratings yet
- PsoDocument17 pagesPsoKanishka SahniNo ratings yet
- Numerical Method: AssignmentDocument7 pagesNumerical Method: AssignmentAnonymous GUExuPNo ratings yet
- Crank Nicolson Scheme: X U C T UDocument9 pagesCrank Nicolson Scheme: X U C T UChandan GargNo ratings yet
- 10 02 Parabolic PDE IntroDocument26 pages10 02 Parabolic PDE IntroJohn Bofarull GuixNo ratings yet
- Singly Linked Iist Programme As in "Understanding Pointers in C"-By Yashwant KanetkarDocument5 pagesSingly Linked Iist Programme As in "Understanding Pointers in C"-By Yashwant Kanetkararunesh198No ratings yet
- Engineering Optimization: An Introduction with Metaheuristic ApplicationsFrom EverandEngineering Optimization: An Introduction with Metaheuristic ApplicationsNo ratings yet
- Iterative Solution of Nonlinear Equations in Several VariablesFrom EverandIterative Solution of Nonlinear Equations in Several VariablesNo ratings yet
- Tables of Laguerre Polynomials and Functions: Mathematical Tables Series, Vol. 39From EverandTables of Laguerre Polynomials and Functions: Mathematical Tables Series, Vol. 39No ratings yet
- Inequalities for Differential and Integral EquationsFrom EverandInequalities for Differential and Integral EquationsNo ratings yet
- Elliptic Problem SolversFrom EverandElliptic Problem SolversMartin H. SchultzNo ratings yet
- Dynamical Systems Method for Solving Nonlinear Operator EquationsFrom EverandDynamical Systems Method for Solving Nonlinear Operator EquationsRating: 5 out of 5 stars5/5 (1)
- Factorization Methods for Discrete Sequential EstimationFrom EverandFactorization Methods for Discrete Sequential EstimationNo ratings yet
- Numerical Solutions of Boundary Value Problems for Ordinary Differential EquationsFrom EverandNumerical Solutions of Boundary Value Problems for Ordinary Differential EquationsA.K. AzizNo ratings yet
- Contoh Analisis Swot Penyelenggaraan DiklatDocument16 pagesContoh Analisis Swot Penyelenggaraan DiklatIdwan Roshid100% (1)
- Recurrence Relation Presentation MEERADocument27 pagesRecurrence Relation Presentation MEERAKruti0% (1)
- Further Pure Mathematics 2Document4 pagesFurther Pure Mathematics 2r_s_kediaNo ratings yet
- Statistics Year 2 (A Level) Unit Test 1: Regression and Correlation Mark SchemeDocument9 pagesStatistics Year 2 (A Level) Unit Test 1: Regression and Correlation Mark SchemeRory SimkinsNo ratings yet
- The Statistical Tools - CompleteDocument29 pagesThe Statistical Tools - CompleteJake CanlasNo ratings yet
- QUARTER - 3 - / SEMESTER - 2nd - Week 7Document10 pagesQUARTER - 3 - / SEMESTER - 2nd - Week 7Tristan Paul PagalananNo ratings yet
- RELIABILITY ENGINEERING COURSEDocument2 pagesRELIABILITY ENGINEERING COURSERoNo ratings yet
- Guided NotesDocument5 pagesGuided Notesapi-529400469No ratings yet
- Iteration Question'sDocument17 pagesIteration Question'sAyra MujibNo ratings yet
- CourseIntroduce ST MAS202Document12 pagesCourseIntroduce ST MAS202(FU HCM) Trần Thanh HiệpNo ratings yet
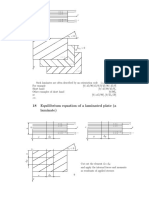
- 18 Equilibrium Equation of A Laminated Plate (A Laminate)Document8 pages18 Equilibrium Equation of A Laminated Plate (A Laminate)Khalil DeghoumNo ratings yet
- Chapter 3 - Forecasting - EXCEL TEMPLATESDocument14 pagesChapter 3 - Forecasting - EXCEL TEMPLATESKirsten Claire BurerosNo ratings yet
- Calculus Cheat Sheet LimitsDocument2 pagesCalculus Cheat Sheet LimitsArn Stefhan JimenezNo ratings yet
- Machine Learning Andrew NG Week 5 Quiz 1Document3 pagesMachine Learning Andrew NG Week 5 Quiz 1Hương ĐặngNo ratings yet
- Lesson 4 - Measures of VariationDocument3 pagesLesson 4 - Measures of VariationMeleza Joy Satur100% (1)
- Chapter 14 Principle of Neutralization TDocument29 pagesChapter 14 Principle of Neutralization TS. MartinezNo ratings yet
- Tuning Workshop PID Controllers: Shell Global SolutionsDocument33 pagesTuning Workshop PID Controllers: Shell Global SolutionsSunil SinghNo ratings yet
- Lesson 1 Differential Calculus IntroductionDocument73 pagesLesson 1 Differential Calculus IntroductionAngelica Marie DiegoNo ratings yet
- OPMAN Activity 5Document4 pagesOPMAN Activity 5Lalosa Fritz Angela R.No ratings yet
- Turkish Natural Language Processing StudiesDocument7 pagesTurkish Natural Language Processing StudiesEditor IJTSRDNo ratings yet
- Chapter 1Document15 pagesChapter 1Muhammad Awais0% (1)
- Today's Topic: 1st Derivative TestDocument15 pagesToday's Topic: 1st Derivative TestMd. Shafiqul Haque BhuiyanNo ratings yet
- QA20091 Em2 23 - 3Document4 pagesQA20091 Em2 23 - 3api-25895802No ratings yet
- StatisticDocument6 pagesStatisticCess Ann RongalerioNo ratings yet
- Kuang Delay DEsDocument12 pagesKuang Delay DEsLakshmi BurraNo ratings yet
- Lesson 31 Linear Differential Equation of Higher Order: Module 3: Ordinary Differential EquationsDocument6 pagesLesson 31 Linear Differential Equation of Higher Order: Module 3: Ordinary Differential EquationsJoseph NjugunaNo ratings yet
- Extremal Functions On Generalized Weinstein SoboleDocument19 pagesExtremal Functions On Generalized Weinstein SoboleThe SangeNo ratings yet
- 05 2016 - 2017 H2 Maths Differentiation Techniques TutorialDocument3 pages05 2016 - 2017 H2 Maths Differentiation Techniques TutorialihohsrogsNo ratings yet
- CR Equations CompleteDocument22 pagesCR Equations CompleteManav MehtaNo ratings yet
- Topic 3a (Moment Distribution Method Beam)Document22 pagesTopic 3a (Moment Distribution Method Beam)Nazrul IzdhamNo ratings yet