You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Capacitors Investigatory ProjectDocument18 pagesCapacitors Investigatory Projectrajan k singh65% (63)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- DCD 435Document1 pageDCD 435ojhabreNo ratings yet
- FIFODocument13 pagesFIFOrenju91No ratings yet
- Technology: ControlsDocument32 pagesTechnology: ControlsAli Hossain AdnanNo ratings yet
- H-Bridge PPDocument16 pagesH-Bridge PPMohammed HediaNo ratings yet
- Voltage Surge (Voltage Spikes) : A Voltage Surge Is A Voltage Impulse or Wave Which IsDocument19 pagesVoltage Surge (Voltage Spikes) : A Voltage Surge Is A Voltage Impulse or Wave Which IsMonik Mishra100% (1)
- Fiitjee: JEE (Main), 2014Document23 pagesFiitjee: JEE (Main), 2014Gnana Deepak JuvvaNo ratings yet
- Nt991G Mk2 Gyro/Mag AutopilotDocument2 pagesNt991G Mk2 Gyro/Mag AutopilotAshish DharjiyaNo ratings yet
- AQA AS Physics A Chapter 4 Textbook AnswersDocument4 pagesAQA AS Physics A Chapter 4 Textbook AnswerscathylisterNo ratings yet
- University of Engineering and Technology: Power Supply and BreadboardDocument7 pagesUniversity of Engineering and Technology: Power Supply and BreadboardEtsham Amjad100% (1)
- L - 02 - Calibration of The Testing SystemDocument60 pagesL - 02 - Calibration of The Testing SystemSanjaya PereraNo ratings yet
- Datos D Emotor DC WGMDocument1 pageDatos D Emotor DC WGMjosue perezNo ratings yet
- Kreatryx Analog Circuits PDFDocument43 pagesKreatryx Analog Circuits PDFshubhamNo ratings yet
- Cac+ Rac Submittal-A4848Document179 pagesCac+ Rac Submittal-A4848MUBASHIRNo ratings yet
- Hill Hold ControlDocument4 pagesHill Hold ControlacairalexNo ratings yet
- Siemens Se 55a590-45 Sgs57m12ff17 Reparation-ManualDocument67 pagesSiemens Se 55a590-45 Sgs57m12ff17 Reparation-ManualD²EMNo ratings yet
- Power System Protection: Noornabi ShaikhDocument10 pagesPower System Protection: Noornabi ShaikhSadam MemonNo ratings yet
- MJPDocument22 pagesMJPJatin BangaliNo ratings yet
- Week 1 Part I Capacitors June 05Document41 pagesWeek 1 Part I Capacitors June 05Marty J. SmithNo ratings yet
- Tabela SMDDocument80 pagesTabela SMDUdenir Jeus de moraisNo ratings yet
- LCD InterfacingDocument5 pagesLCD InterfacingRokibul hasanNo ratings yet
- Aviva Project Main PDFDocument76 pagesAviva Project Main PDFSucharita Dashing SuchuNo ratings yet
- DGT Quick Setup 07.03 13.03 ENDocument1 pageDGT Quick Setup 07.03 13.03 ENseabellNo ratings yet
- Silo Weight & Volume CalculationDocument18 pagesSilo Weight & Volume CalculationYogesh PatilNo ratings yet
- Data Sheet 3VM1110-3EE32-0AA0: ModelDocument4 pagesData Sheet 3VM1110-3EE32-0AA0: ModelJanaina SouzaNo ratings yet
- Buchholz Relay in Transformer - Buchholz Relay Operation and Principle - Electrical EngineeringDocument3 pagesBuchholz Relay in Transformer - Buchholz Relay Operation and Principle - Electrical EngineeringfurkandarNo ratings yet
- Transducers - 2.1 Sensors and Actuators - IOT2x Courseware - EdXDocument4 pagesTransducers - 2.1 Sensors and Actuators - IOT2x Courseware - EdXzaheeruddin_mohdNo ratings yet
- Thermoelectric Module TEC1-12706Document4 pagesThermoelectric Module TEC1-12706reis emperorNo ratings yet
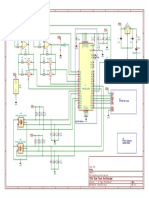
- Title: Dual Trace Oscilloscope: U5 ST7735s TFT ScreenDocument1 pageTitle: Dual Trace Oscilloscope: U5 ST7735s TFT ScreenAbdelkader Mechernene100% (2)
- AFLDocument4 pagesAFLoadipphone7031No ratings yet