You might also like
- Manual de Instrucciones NI35 r2 1Document2 pagesManual de Instrucciones NI35 r2 1eduardoNo ratings yet
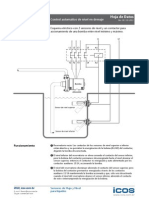
- Control Nivel Drenaje IcosDocument1 pageControl Nivel Drenaje IcosIcos Sensores para LíquidosNo ratings yet
- RE22R1AMR On-delay Timing Relay DatasheetDocument7 pagesRE22R1AMR On-delay Timing Relay DatasheetjalexivanNo ratings yet
- CROUZET Control de Nivel de Un TanqueDocument3 pagesCROUZET Control de Nivel de Un TanqueMabe PerezNo ratings yet
- WEG Guia Practico de Capacitacion Tecnico Comercial 50026117 Catalogo EspanolDocument16 pagesWEG Guia Practico de Capacitacion Tecnico Comercial 50026117 Catalogo EspanolAndré Aranzamendi La TorreNo ratings yet
- Bobinado excéntrico bipolar 24 ranurasDocument29 pagesBobinado excéntrico bipolar 24 ranurasLeo Alda Uyg100% (1)
- Catalogo DIRIS A20Document4 pagesCatalogo DIRIS A20nico_v180No ratings yet
- Proyecto2.1. Temporizadores On-Delay y Off-Delay (Reparado)Document29 pagesProyecto2.1. Temporizadores On-Delay y Off-Delay (Reparado)Fernando TejadaNo ratings yet
- Informe de Practica - Convertidor Micromaster 420 de SIEMENSDocument8 pagesInforme de Practica - Convertidor Micromaster 420 de SIEMENSreanto87No ratings yet
- Motores Asincronos - VDFDocument23 pagesMotores Asincronos - VDFCesar MusepNo ratings yet
- Multibombas Control Fijo/Proyecto Final Cfw-11 Control Fijo MultibombasDocument2 pagesMultibombas Control Fijo/Proyecto Final Cfw-11 Control Fijo MultibombasRobin Vargas FloresNo ratings yet
- WEG Multimedidor de Grandezas Electricas MMW03 y Controlador Automatico Del Factor de Potencia 50085303 EsDocument44 pagesWEG Multimedidor de Grandezas Electricas MMW03 y Controlador Automatico Del Factor de Potencia 50085303 EsfelipeNo ratings yet
- Problema 7.2 - Diseñar El Programa Lógico Que Efectúe El Control de La Mezcla Realizada en El Depósito Destinado Al Efecto, Cuyo Esquema Mostramos en La FiguraDocument2 pagesProblema 7.2 - Diseñar El Programa Lógico Que Efectúe El Control de La Mezcla Realizada en El Depósito Destinado Al Efecto, Cuyo Esquema Mostramos en La Figuradiegofernandodiego0% (2)
- Allen Bradley - Uso de Disyuntores en Variadores de Frecuencia PDFDocument8 pagesAllen Bradley - Uso de Disyuntores en Variadores de Frecuencia PDFRotsen Altuve100% (1)
- Diferenciales Uso Tetra Como TriDocument1 pageDiferenciales Uso Tetra Como TriGabriel210364No ratings yet
- Practica Con Pulsadores y Contactores 33Document5 pagesPractica Con Pulsadores y Contactores 33José Luis Vásquez SilvaNo ratings yet
- T - 01 - Introducción y Generalidades - 01 - 2014 PDFDocument40 pagesT - 01 - Introducción y Generalidades - 01 - 2014 PDFNICOLÁS MARÍN SAAVEDRANo ratings yet
- WEG cfw11 Manual de Programacion 0899.5842 2.0x Manual Espanol PDFDocument290 pagesWEG cfw11 Manual de Programacion 0899.5842 2.0x Manual Espanol PDFEl PapiNo ratings yet
- Reles de Tiempo 7PU + 3UGDocument2 pagesReles de Tiempo 7PU + 3UGalperdaNo ratings yet
- Problemas de Circuito de Mando 1 2020Document5 pagesProblemas de Circuito de Mando 1 2020Torito MoreNo ratings yet
- Manual de Instrucciones Arrancador SSW-06 PDFDocument159 pagesManual de Instrucciones Arrancador SSW-06 PDFrodolfoNo ratings yet
- SPA - Ver Openlab PDFDocument46 pagesSPA - Ver Openlab PDFFrancisco HernandezNo ratings yet
- Tablero TDN 3p.a1Document1 pageTablero TDN 3p.a1HINo ratings yet
- Manual de BobinadosDocument43 pagesManual de BobinadosnelsonNo ratings yet
- Tarea 01 PLC I A4 UltDocument4 pagesTarea 01 PLC I A4 UltFranco Cirineo MedinaNo ratings yet
- Curso de PLC Twido Basico 5ta ParteDocument83 pagesCurso de PLC Twido Basico 5ta ParteCristhian Peña CastilloNo ratings yet
- Solucionario IEInteriores Muestra Ud1 PDFDocument8 pagesSolucionario IEInteriores Muestra Ud1 PDFMarPau 78No ratings yet
- Foro Temático de Transformadores.Document15 pagesForo Temático de Transformadores.AJoel Facundo TCNo ratings yet
- Condensadores Varplus M1-Varlogic r6Document14 pagesCondensadores Varplus M1-Varlogic r6Luis Miguuel Sallo MaytaNo ratings yet
- WEG SSW900 Manual Del Usuario 10005616439 EsDocument77 pagesWEG SSW900 Manual Del Usuario 10005616439 EsLuis MurNo ratings yet
- Manual Prácticas de MotoresDocument63 pagesManual Prácticas de MotoresLeonardo VC100% (1)
- Labo1 ContactorDocument12 pagesLabo1 ContactorMarco Antonio Fernández SalazarNo ratings yet
- Curso de Easy - Clase1Document20 pagesCurso de Easy - Clase1Jhonny AspiNo ratings yet
- GUIA Control y AutomatizacionDocument46 pagesGUIA Control y AutomatizacionFranzJavierHuarachiNo ratings yet
- Lista de Precios Energia LaumayerDocument308 pagesLista de Precios Energia LaumayerJuan Felipe LondoñoNo ratings yet
- Arranque SHUNTDocument10 pagesArranque SHUNTAlexander Valencia100% (1)
- Manual Variador Frecuencia PowerFlex40Document13 pagesManual Variador Frecuencia PowerFlex40julio javier gonzales gonzalesNo ratings yet
- FinalDocument50 pagesFinalafredo quispe perezNo ratings yet
- Autotransformadores: concepto, tipos, aplicaciones y conexionesDocument55 pagesAutotransformadores: concepto, tipos, aplicaciones y conexionesArlington Ademir Horna MegoNo ratings yet
- No 02-2 Arranque Directo Con Inversion de Giro Del Motor de Induccion TrifasicoDocument28 pagesNo 02-2 Arranque Directo Con Inversion de Giro Del Motor de Induccion TrifasicoEduard Nayef Baltazar IbarraNo ratings yet
- Arranque Directo M3f Con Enclavamiento y SeñalizaciónDocument1 pageArranque Directo M3f Con Enclavamiento y Señalizacióngeav25653855No ratings yet
- CFW-11 V5.8X Manual de ProgramaciónDocument305 pagesCFW-11 V5.8X Manual de ProgramaciónDiana Alejandra Aragon CeballosNo ratings yet
- Taller electro neumática secuencia pulsadorDocument4 pagesTaller electro neumática secuencia pulsadorAlejandraNo ratings yet
- Solucion 5Document1 pageSolucion 5Junior Tejada SanchezNo ratings yet
- Análisis del comportamiento estrella triangulo para motores asíncronosDocument41 pagesAnálisis del comportamiento estrella triangulo para motores asíncronosmpereyraNo ratings yet
- Accionamientos ElectromagnéticosDocument14 pagesAccionamientos Electromagnéticosjorgealberto61No ratings yet
- HYD-2300 Spn-4Document17 pagesHYD-2300 Spn-4MANUEL CASTILLONo ratings yet
- Ie - 01 Predios Unifamiliares y MultifamiliaresDocument18 pagesIe - 01 Predios Unifamiliares y MultifamiliaresKatherine María Zambrano Casas100% (1)
- Problemas de Electrotecnia 8-13 Cap 5Document6 pagesProblemas de Electrotecnia 8-13 Cap 5GiancarloMlmNo ratings yet
- Prácticas ATV312Document61 pagesPrácticas ATV312Sergio Galán NúñezNo ratings yet
- Manual de Curso de Automatizacion Industrial IiiDocument43 pagesManual de Curso de Automatizacion Industrial IiiJonathan CardenasNo ratings yet
- Bombas PedrolloDocument29 pagesBombas PedrolloKratos2711No ratings yet
- CD 8453 PDFDocument247 pagesCD 8453 PDFCristian GuevaraNo ratings yet
- Arranque de Motores ElectricosDocument34 pagesArranque de Motores ElectricosGerardo Reyes Muñoz100% (1)
- Guía de Prácticas CI-JMOLINADocument40 pagesGuía de Prácticas CI-JMOLINANelson Rodrigo Zapata VillacisNo ratings yet
- Diseño circuitos control eléctricoDocument34 pagesDiseño circuitos control eléctricoCris Monse Ochoa AlbujaNo ratings yet
- Practicas Control IndustrialDocument33 pagesPracticas Control IndustrialhugoerasmoNo ratings yet
- Laboratorio Control IndustrialDocument27 pagesLaboratorio Control Industrialrnystn2392No ratings yet
- Circuitos de control industrialDocument35 pagesCircuitos de control industrialraulernesto28No ratings yet
- Practicas Control IndustrialDocument14 pagesPracticas Control IndustrialDiego Lalaleo0% (2)
- Análisis de pequeña señal de sistemas de regulación de velocidad y turbinas hidroeléctricasDocument157 pagesAnálisis de pequeña señal de sistemas de regulación de velocidad y turbinas hidroeléctricasJaol1976No ratings yet
- Plan de TesisDocument6 pagesPlan de TesisJaime M Barrera CastilloNo ratings yet
- Pid PDFDocument5 pagesPid PDFJaime M Barrera CastilloNo ratings yet
- PidDocument10 pagesPidFernandoi IdrovoNo ratings yet
- A Mi Mamita QueridaDocument1 pageA Mi Mamita QueridaJaime M Barrera CastilloNo ratings yet
- Análisis de pequeña señal de sistemas de regulación de velocidadDocument12 pagesAnálisis de pequeña señal de sistemas de regulación de velocidadJaime M Barrera CastilloNo ratings yet
- Perfil Proyecto - V9Document23 pagesPerfil Proyecto - V9geulateNo ratings yet
- Test para Renovar Licencia para Conducir-EcuadorDocument31 pagesTest para Renovar Licencia para Conducir-Ecuadorecastorres100% (3)
- Practica7 VariableBinomial BinomialNegativaDocument27 pagesPractica7 VariableBinomial BinomialNegativaGenesis PluasNo ratings yet
- GlosarioDocument5 pagesGlosarioALYSON DARIANA ZARAZUA MERINONo ratings yet
- UIS Mecánica Medio ContinuoDocument5 pagesUIS Mecánica Medio ContinuoAndrea LuciaNo ratings yet
- Analisis Electrogravimétrico y Coulombimétrico.Document24 pagesAnalisis Electrogravimétrico y Coulombimétrico.Luz SoriaNo ratings yet
- Parcial 01.01.20.03Document1 pageParcial 01.01.20.03Daniel AlvarezNo ratings yet
- Sistema Ficheros WindowsDocument22 pagesSistema Ficheros WindowsS.D.SNo ratings yet
- Geometría plana: Puntos de corte de rectasDocument7 pagesGeometría plana: Puntos de corte de rectasRonny Condori DiazNo ratings yet
- Keyence FS-N40 SeriesDocument24 pagesKeyence FS-N40 SeriesGuillermo Urrutia0% (1)
- PTS-PH-MM046 Montaje de Primario Transmisión Hoist R9Document10 pagesPTS-PH-MM046 Montaje de Primario Transmisión Hoist R9maocaleirlNo ratings yet
- Movimiento Circular UniformeDocument3 pagesMovimiento Circular UniformeSoloAventurasNadaMazNo ratings yet
- Resumen Compo Fede G-1Document173 pagesResumen Compo Fede G-1EdwinTolentinoNo ratings yet
- In Uencia de La Autoestima y La Atención en El Rendimiento Académico Del Alumnado de La ESO y FPBDocument9 pagesIn Uencia de La Autoestima y La Atención en El Rendimiento Académico Del Alumnado de La ESO y FPBMario Herrera CartesNo ratings yet
- Correccion EstadisticaDocument23 pagesCorreccion EstadisticaOscar Dario100% (1)
- Introduccion Bioestadistica UCOPressDocument142 pagesIntroduccion Bioestadistica UCOPresslorenzoNo ratings yet
- Balance de Masa y Energia MatlabDocument0 pagesBalance de Masa y Energia MatlabMartin IztapalapaNo ratings yet
- Organizadores Graficos 1Document11 pagesOrganizadores Graficos 1romeoNo ratings yet
- Ensayo ReguladoresDocument9 pagesEnsayo ReguladoresEddy SabanNo ratings yet
- Cálculo de presiones en tanque esférico y diferencia de presión en manómetroDocument18 pagesCálculo de presiones en tanque esférico y diferencia de presión en manómetroESTEBAN DIONICIO JAN EDWIN100% (1)
- Potencial Eléctrico y Superficies EquipotencialesDocument5 pagesPotencial Eléctrico y Superficies EquipotencialesAndres Tuiran MartinezNo ratings yet
- Mat1-U8-Sesion 10Document6 pagesMat1-U8-Sesion 10José Díaz AchoNo ratings yet
- Xerox Phaser 8550Document14 pagesXerox Phaser 8550Mr. Kleier100% (1)
- Guia Tecnica Valery Julio 2001Document11 pagesGuia Tecnica Valery Julio 2001Youkkat SamiNo ratings yet
- Ejercicios Unidad IIIDocument5 pagesEjercicios Unidad IIIniqueponerNo ratings yet
- Análisis variables altura carga velocidadDocument1 pageAnálisis variables altura carga velocidadJhean TurpoNo ratings yet
- Fundamentos mecánica UNalDocument4 pagesFundamentos mecánica UNalAndre Calderón GonzálezNo ratings yet
- POROSIDADDocument7 pagesPOROSIDADbenjaminNo ratings yet
- Gestión de Proyectos de MantenimientoDocument62 pagesGestión de Proyectos de Mantenimientovictor100% (1)
- UMX49 61 ESP Rev ADocument8 pagesUMX49 61 ESP Rev AZiel DistanteNo ratings yet
- CuestionarioDocument10 pagesCuestionarioANDER EDUARDO CASTILLO VALLEJOSNo ratings yet
- 5.2.2 - 5.2.3 Control y TecnicasDocument3 pages5.2.2 - 5.2.3 Control y TecnicasJavier Lara FloresNo ratings yet