You might also like
- El Libro de Urantia y Sus Predicciones Cientc3adficasDocument15 pagesEl Libro de Urantia y Sus Predicciones Cientc3adficasJose Luis Gallego100% (4)
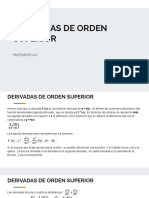
- Derivadas de Orden Superior y Derivadas ImplicitasDocument42 pagesDerivadas de Orden Superior y Derivadas ImplicitasJavier VallejosNo ratings yet
- Curvas de nivel y derivadas parciales de funciones de varias variablesDocument42 pagesCurvas de nivel y derivadas parciales de funciones de varias variablesDavidNo ratings yet
- Integrales de La Forma y TCP PDFDocument6 pagesIntegrales de La Forma y TCP PDFAngeles Hernández TapiaNo ratings yet
- Tarea 4Document17 pagesTarea 4Juan Diego Castro ArevaloNo ratings yet
- Realidades Paralelas y Como Hacer El SaltoDocument12 pagesRealidades Paralelas y Como Hacer El SaltoAnonymous 08LGXiSa100% (1)
- (Portafolio) Unidad 2. Curvas en R2 y Ecuaciones ParamétricasDocument30 pages(Portafolio) Unidad 2. Curvas en R2 y Ecuaciones ParamétricasJesus Emmanuel Moreno CotaNo ratings yet
- Unidad 4 Solucion Por Series de Potencia - Nov20Document27 pagesUnidad 4 Solucion Por Series de Potencia - Nov20Melissa AldacoNo ratings yet
- Ejercicios Procesos EstocásticosDocument5 pagesEjercicios Procesos EstocásticosCintia RodriguezNo ratings yet
- Taller Calculo3 Integrales de LineaDocument2 pagesTaller Calculo3 Integrales de LineaDanielNo ratings yet
- Tarea 04 - Ecuaciones ExactasDocument2 pagesTarea 04 - Ecuaciones ExactasPAOLA RODRIGUEZ ALVAREZNo ratings yet
- Ejercicios Resueltos2Document18 pagesEjercicios Resueltos2Julieta Azpur MenesesNo ratings yet
- Calculo 2Document15 pagesCalculo 2Junior Jair Luna TejadaNo ratings yet
- Método de Bisección. Código en C++Document1 pageMétodo de Bisección. Código en C++valNo ratings yet
- Calculo III-tema 3Document63 pagesCalculo III-tema 3Cristian Albino FretelNo ratings yet
- El Axioma de Completez de Los Números Reales para Demostrar La Existencia de Numero IrracionalesDocument10 pagesEl Axioma de Completez de Los Números Reales para Demostrar La Existencia de Numero IrracionalesMauricio YepezNo ratings yet
- Analisis Combinatorio 11Document17 pagesAnalisis Combinatorio 11Julio Peña GalindoNo ratings yet
- Variables Aleatorias Bidimensionales PDFDocument34 pagesVariables Aleatorias Bidimensionales PDFDavid Sánchez67% (3)
- Ejemplo de Volumen Con Integrales Dobles PDFDocument2 pagesEjemplo de Volumen Con Integrales Dobles PDFwatakshi varios copy 2No ratings yet
- Superficies cilíndricas, de revolución y cuádricasDocument23 pagesSuperficies cilíndricas, de revolución y cuádricasLuis FernandoNo ratings yet
- Taller 2 Termodinamica 2.0Document10 pagesTaller 2 Termodinamica 2.0Ana Karolina Valeria PalenciaNo ratings yet
- 2009-08-21 - Practicas Semestre II 2009Document59 pages2009-08-21 - Practicas Semestre II 2009edward034No ratings yet
- Formulario de elasticidad y resistencia de materialesDocument4 pagesFormulario de elasticidad y resistencia de materialesalterlaboroNo ratings yet
- Practica 2 - TermodinamicaDocument22 pagesPractica 2 - TermodinamicaKatibel GraellNo ratings yet
- Distribución de Laplace: densidad, función y aplicacionesDocument4 pagesDistribución de Laplace: densidad, función y aplicacioneskiraNo ratings yet
- Informe de Experimento de FlotacionDocument4 pagesInforme de Experimento de FlotacionClaudia Cañon100% (1)
- 5-Integración MúltipleDocument116 pages5-Integración Múltiplemimarumo25No ratings yet
- Laboratorio 5Document5 pagesLaboratorio 5Jose ChoqueNo ratings yet
- Modelos y predicción en cálculo diferencial e integralDocument9 pagesModelos y predicción en cálculo diferencial e integralCarlos MartinezNo ratings yet
- Guia de Ejercicios Prueba 2 Esp. Vect.Document7 pagesGuia de Ejercicios Prueba 2 Esp. Vect.Franco Gnecco GonzálezNo ratings yet
- TallerDocument3 pagesTallerAstrid Mina GallardoNo ratings yet
- Diferencias métodos depresiónDocument5 pagesDiferencias métodos depresiónJose PancorboNo ratings yet
- Modellus 4.01Document18 pagesModellus 4.01Mario Alberto BianchiNo ratings yet
- SolucionesDocument41 pagesSolucionesMauricio Arguello Solano100% (1)
- Calculo - Longitud de ArcoDocument15 pagesCalculo - Longitud de ArcoJulio César LópezNo ratings yet
- Colgesan Guia 09 Talleresmat 11 S 2Document4 pagesColgesan Guia 09 Talleresmat 11 S 2Cristian Libardo Quintero CastañedaNo ratings yet
- EJERCICIOSDocument3 pagesEJERCICIOSVaneza Torres AlmironNo ratings yet
- DJIDocument10 pagesDJIDaimely GonzalezNo ratings yet
- Cinemática - Problemas de Movimiento en Dos DimensionesDocument6 pagesCinemática - Problemas de Movimiento en Dos DimensionesLANDEROS QUIROZ JAZMIN CRISTALNo ratings yet
- Componentes Tangencial y Normal de La AceleracionDocument5 pagesComponentes Tangencial y Normal de La AceleracionGuiselle Palmas MoralesNo ratings yet
- Regresión RidgeDocument17 pagesRegresión Ridgecamilassoto_roNo ratings yet
- Geometría vectorial: vectores, rectas y planosDocument5 pagesGeometría vectorial: vectores, rectas y planosDiego7120No ratings yet
- 3.1 Rectas en El EspacioDocument14 pages3.1 Rectas en El Espacio2021 Act HERNANDEZ MOTA LUIS FERNANDONo ratings yet
- Ingenieria de Control Moderna Ogata 5a EdDocument15 pagesIngenieria de Control Moderna Ogata 5a EdCesarCFNo ratings yet
- Vectores y valores propios de aplicaciones linealesDocument3 pagesVectores y valores propios de aplicaciones linealesadri9421No ratings yet
- Nota de Clase - 2Document49 pagesNota de Clase - 2HEIDY CAMILA SILVA TOLEDONo ratings yet
- Taller Interés Compuesto 23.06.2021Document3 pagesTaller Interés Compuesto 23.06.2021camilaNo ratings yet
- Fundamentos EstadísticaDocument92 pagesFundamentos Estadísticaandres_hernandez_30No ratings yet
- Ejercicios de integrales múltiplesDocument32 pagesEjercicios de integrales múltiplesjose2182No ratings yet
- Problemas con valores iniciales y condiciones fronteraDocument17 pagesProblemas con valores iniciales y condiciones fronteraJuan PerezNo ratings yet
- Calculadora de Integrales (Antiderivadas) - SymbolabDocument2 pagesCalculadora de Integrales (Antiderivadas) - SymbolabNeider Atencia100% (1)
- ( X) - SQRT (5) ( (X 3-2) - (X 3+2) ) - Calculadora de Derivadas Parciales - SymbolabDocument2 pages( X) - SQRT (5) ( (X 3-2) - (X 3+2) ) - Calculadora de Derivadas Parciales - SymbolabJesús Manuel CRNo ratings yet
- Laboratorio 4 Fisica1Document9 pagesLaboratorio 4 Fisica1franklinNo ratings yet
- Informe de Medicion de LongitudDocument4 pagesInforme de Medicion de Longitudorlando3marti-144932No ratings yet
- Trayectorias en r3Document27 pagesTrayectorias en r3AMYNNXXXXNo ratings yet
- Funcion VectorialDocument24 pagesFuncion VectorialLenin RojasNo ratings yet
- Calculo Vectorial Colley Cap3Document55 pagesCalculo Vectorial Colley Cap3Génesis MoránNo ratings yet
- 01 PD (Eeaa) PDFDocument18 pages01 PD (Eeaa) PDFBrenda BogarinNo ratings yet
- Curvas: Derivadas, Tangentes y LongitudDocument8 pagesCurvas: Derivadas, Tangentes y LongitudKatherine Quispe AguilarNo ratings yet
- Libro Cálculo Multivariable Capítulo IVDocument50 pagesLibro Cálculo Multivariable Capítulo IVAnthony Carranza AnguloNo ratings yet
- Formación Humana. ValoresDocument3 pagesFormación Humana. ValoresMiguel FloresNo ratings yet
- Beneficios de La Ingenieria MecanicaDocument2 pagesBeneficios de La Ingenieria MecanicaMiguel FloresNo ratings yet
- Caracteristicas de Un Buen LiderDocument9 pagesCaracteristicas de Un Buen LiderMiguel FloresNo ratings yet
- Futuro Con La Ingenieria MecanicaDocument2 pagesFuturo Con La Ingenieria MecanicaMiguel FloresNo ratings yet
- Niveles de LecturaDocument3 pagesNiveles de LecturaMiguel FloresNo ratings yet
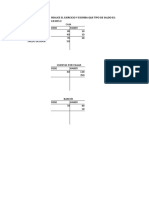
- Ejercicios Partida Doble Tipos de Saldo Deudor Acreedor Saldo CeroDocument2 pagesEjercicios Partida Doble Tipos de Saldo Deudor Acreedor Saldo CeroMiguel FloresNo ratings yet
- Syllabus de Emprendimiento Segundo Bachillerato. WordDocument1 pageSyllabus de Emprendimiento Segundo Bachillerato. WordMiguel FloresNo ratings yet
- Nociones Básicas de LecturaDocument2 pagesNociones Básicas de LecturaMiguel FloresNo ratings yet
- Taller Individual Conceptos de Contabilidad.Document2 pagesTaller Individual Conceptos de Contabilidad.Miguel FloresNo ratings yet
- Tipos de EnsayoDocument3 pagesTipos de EnsayoMiguel FloresNo ratings yet
- Ejercicio de C Alculo de Impuesto A La RentaDocument3 pagesEjercicio de C Alculo de Impuesto A La RentaMiguel FloresNo ratings yet
- Syllabus de Emprendimiento Tercero BachilleratoDocument2 pagesSyllabus de Emprendimiento Tercero BachilleratoMiguel FloresNo ratings yet
- Tipos de Emprendimiento y LiderazgoDocument7 pagesTipos de Emprendimiento y LiderazgoMiguel FloresNo ratings yet
- Taller Tablas Dinamicas.Document1 pageTaller Tablas Dinamicas.Miguel FloresNo ratings yet
- Investigacion EmprendimientoDocument3 pagesInvestigacion EmprendimientoMiguel FloresNo ratings yet
- Taller Emprendimiento. ScribDocument2 pagesTaller Emprendimiento. ScribMiguel FloresNo ratings yet
- Investigacion de Costos Fijos Variables Semifijjos para TallerDocument3 pagesInvestigacion de Costos Fijos Variables Semifijjos para TallerMiguel FloresNo ratings yet
- Tipos de EmprendimientoDocument5 pagesTipos de EmprendimientoMiguel FloresNo ratings yet
- Syllabus de Emprendimiento Tercero BachilleratoDocument2 pagesSyllabus de Emprendimiento Tercero BachilleratoMiguel FloresNo ratings yet
- Taller Ingresos Gastos InversionDocument2 pagesTaller Ingresos Gastos InversionMiguel FloresNo ratings yet
- Taller Cuestionario Matriz de La Situación de MercadoDocument3 pagesTaller Cuestionario Matriz de La Situación de MercadoMiguel FloresNo ratings yet
- Taller Individual Qué Son Las Niif.Document1 pageTaller Individual Qué Son Las Niif.Miguel FloresNo ratings yet
- Dia de La Cultura Tributaria - ScribDocument1 pageDia de La Cultura Tributaria - ScribMiguel FloresNo ratings yet
- Taller 1 de Conceptos FinancierosDocument2 pagesTaller 1 de Conceptos FinancierosMiguel FloresNo ratings yet
- Syllabus de Emprendimiento Segundo BachilleratoDocument1 pageSyllabus de Emprendimiento Segundo BachilleratoMiguel FloresNo ratings yet
- Exposición de Ciudadania Luis OñateDocument1 pageExposición de Ciudadania Luis OñateMiguel FloresNo ratings yet
- Investigación Transito AmaguañaDocument2 pagesInvestigación Transito AmaguañaMiguel FloresNo ratings yet
- Taller Cuestionario Matriz de La Situación de MercadoDocument3 pagesTaller Cuestionario Matriz de La Situación de MercadoMiguel FloresNo ratings yet
- Taller Evaluación GeneralDocument2 pagesTaller Evaluación GeneralMiguel FloresNo ratings yet
- Taller Evaluación General 3Document1 pageTaller Evaluación General 3Miguel FloresNo ratings yet
- Acfrogaqm3u Bzvnlsolrgudsbkftoama9okgptwypycgxnabbdat Ektsveoofhk8szbxs7sgrvkeyl Mkbloqbvpzsr8rf3ksaa Itmkzysynb 51ueukz3wcfifqmjb5nkwa5nnm R1ixrchDocument10 pagesAcfrogaqm3u Bzvnlsolrgudsbkftoama9okgptwypycgxnabbdat Ektsveoofhk8szbxs7sgrvkeyl Mkbloqbvpzsr8rf3ksaa Itmkzysynb 51ueukz3wcfifqmjb5nkwa5nnm R1ixrchBrecia Fernanda Mamani AlanocaNo ratings yet
- La Circunferencia Tema CompletoDocument15 pagesLa Circunferencia Tema CompletoAntonioGutierrezRosello100% (1)
- Trabajo Autónomo 02 - Vectores - Parte 1 FisicaDocument5 pagesTrabajo Autónomo 02 - Vectores - Parte 1 Fisicaochoaalicia1987No ratings yet
- Relaciones Métricas de TriángulosDocument3 pagesRelaciones Métricas de TriángulosMaricel Anahi Carbajal SantacruzNo ratings yet
- Geometria 1Document20 pagesGeometria 1Unai Durán RicoNo ratings yet
- Espacios VectorialesDocument16 pagesEspacios VectorialesTefa De la TorreNo ratings yet
- Topología - Clase 8 - Dos Axiomas de SeparaciónDocument11 pagesTopología - Clase 8 - Dos Axiomas de SeparaciónJuan S. PalmaNo ratings yet
- Fisica Experimentos 5Document12 pagesFisica Experimentos 5Diego Alexander Checa GodoyNo ratings yet
- Diferencial Dif. Sucesivas TVMCD Generalizaciòn Dif.1Document10 pagesDiferencial Dif. Sucesivas TVMCD Generalizaciòn Dif.1Sofí TaberaNo ratings yet
- GIROSDocument14 pagesGIROSAnthony Gonzales MiñopeNo ratings yet
- Tippens Fisica 7e Diapositivas 21Document26 pagesTippens Fisica 7e Diapositivas 21Bog RodriguezNo ratings yet
- Ayudantias Mecanica Clasica Cadiz PDFDocument201 pagesAyudantias Mecanica Clasica Cadiz PDFBenjamin CohenNo ratings yet
- Física Básica I - Cinemática Unidimensional y BidimensionalDocument7 pagesFísica Básica I - Cinemática Unidimensional y BidimensionalK. Rodrigo Patty FrancoNo ratings yet
- Plan de Asignatura NovenoDocument9 pagesPlan de Asignatura NovenoRDOAUL MADIENo ratings yet
- 19481134-Manual Expresión Gráfica PDFDocument293 pages19481134-Manual Expresión Gráfica PDFManuNo ratings yet
- Trigonometria-Angulos Notables, Cuadrantales y SignosDocument9 pagesTrigonometria-Angulos Notables, Cuadrantales y SignosRobertoEdmundoRamirezNo ratings yet
- Problemas Rectas y Planos GAV PDFDocument11 pagesProblemas Rectas y Planos GAV PDFPhilip RamirezNo ratings yet
- Sistemas de Ecuaciones Con Dos Incógnitas LECTURA 3Document16 pagesSistemas de Ecuaciones Con Dos Incógnitas LECTURA 3Valeria RendonNo ratings yet
- Guia Congruencia en Cuadrilateros y PoligonosDocument5 pagesGuia Congruencia en Cuadrilateros y PoligonosxbttoxNo ratings yet
- Evaluacion Final AlgebraDocument14 pagesEvaluacion Final AlgebraFabian Bohorquez100% (1)
- Unidad 2. Cinematica.Document31 pagesUnidad 2. Cinematica.Onerquis EspinalNo ratings yet
- Uagrm Informe MruvDocument13 pagesUagrm Informe MruvStephanie Denyss Lozano VilcapomaNo ratings yet
- II-Geom 5TO Grado 3RADocument7 pagesII-Geom 5TO Grado 3RALuis FilioNo ratings yet
- A. Korzibsky. El Papel Del Lenguaje en Los Procesos PerceptivosDocument33 pagesA. Korzibsky. El Papel Del Lenguaje en Los Procesos PerceptivosxaxtainNo ratings yet
- Teoria RodaduraDocument5 pagesTeoria Rodaduradaniel191286No ratings yet
- GuzmanAguilar FelipeGuillermo M19S2AI3Document7 pagesGuzmanAguilar FelipeGuillermo M19S2AI3felipe guillermo guzman aguilarNo ratings yet
- Artículo - Movimiento Circular UniformeDocument7 pagesArtículo - Movimiento Circular UniformeANA MARIA MONCADA CRESPO100% (1)
- DOCUMENTO7M0Document319 pagesDOCUMENTO7M0Pedro ReyesNo ratings yet