You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Assignment - 1 HCI: Task - 1Document3 pagesAssignment - 1 HCI: Task - 1Education materialNo ratings yet
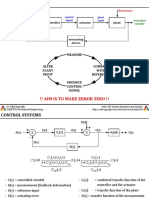
- CONTROL SYSTEMS: MINIMIZING ERRORSDocument11 pagesCONTROL SYSTEMS: MINIMIZING ERRORScapturemrahNo ratings yet
- SOP Overview Presentation 1 21 11Document52 pagesSOP Overview Presentation 1 21 11yvanmmNo ratings yet
- CJV150 - CJV300 - CJV330 - Cutting Adjustment Guide D501067 Ver.2.0Document16 pagesCJV150 - CJV300 - CJV330 - Cutting Adjustment Guide D501067 Ver.2.0BrandonNo ratings yet
- Traffic MGMT QFXDocument1,196 pagesTraffic MGMT QFXmohamad septianto nugrohoNo ratings yet
- Impact of Computer Security System On The Job Performance of The Office TechnologistDocument10 pagesImpact of Computer Security System On The Job Performance of The Office TechnologistIjasini Banga GabrielNo ratings yet
- Appid Yahoo Mail Neo&wssid EZ7 MR Zti M4 J&ymreqid Bec 69Document10 pagesAppid Yahoo Mail Neo&wssid EZ7 MR Zti M4 J&ymreqid Bec 69Juliana R. B. AlmeidaNo ratings yet
- DB2 Command Line Processor Tips and TricksDocument8 pagesDB2 Command Line Processor Tips and Tricksapi-3701299100% (1)
- Signal Generator With Arduino Using DDS and Pico - Hackster - IoDocument9 pagesSignal Generator With Arduino Using DDS and Pico - Hackster - IoAhmed Abdel AzizNo ratings yet
- 2 2 T T T T M T 1 1 T 2 T 2 2 2 2 2 1 2 1 T 1 T 3 T 1 2 1! 2 2! 4 3!Document48 pages2 2 T T T T M T 1 1 T 2 T 2 2 2 2 2 1 2 1 T 1 T 3 T 1 2 1! 2 2! 4 3!AndersonHaydarNo ratings yet
- Flac3d 600 ModelingDocument405 pagesFlac3d 600 ModelingRodolfo Morales GálvezNo ratings yet
- CSE403 Network SecurityDocument2 pagesCSE403 Network SecurityrajatNo ratings yet
- 9-11. The Vicsim ReportDocument1 page9-11. The Vicsim ReportRoger NesralNo ratings yet
- 02b - 27001LA en Day2 V8.2.2 20130730EL UnlockedDocument124 pages02b - 27001LA en Day2 V8.2.2 20130730EL UnlockedBuffalo AveNo ratings yet
- 1000-400-933 - D-X8000 Light Source Service GuideDocument84 pages1000-400-933 - D-X8000 Light Source Service GuideHichem NaghmouchiNo ratings yet
- Curso Execution in SAP Transportation Management - Modulo 1Document67 pagesCurso Execution in SAP Transportation Management - Modulo 1reibeltorresNo ratings yet
- Peak SolutionsDocument9 pagesPeak SolutionsAdeel AhmadNo ratings yet
- Presented By: Ashok Kumar G Pradeep Kumar BDocument10 pagesPresented By: Ashok Kumar G Pradeep Kumar BAmit TyagiNo ratings yet
- DX DiagDocument13 pagesDX DiagSpinnersPeterNo ratings yet
- Subnetting Class C IP AddDocument1 pageSubnetting Class C IP AddKeenly PasionNo ratings yet
- AR Research PaperDocument18 pagesAR Research PaperShresh KumarNo ratings yet
- Report Card Management Project CompleteDocument30 pagesReport Card Management Project CompleteThakur Vishal100% (1)
- محاضرة اختبار صلاحية تدريسDocument8 pagesمحاضرة اختبار صلاحية تدريسZiad Qais100% (1)
- Integrated Bridge System 3Document4 pagesIntegrated Bridge System 3Simon AvramenkoNo ratings yet
- Fuzzy LogicDocument6 pagesFuzzy Logicl_boy93No ratings yet
- Spotify RhythmDocument23 pagesSpotify Rhythmblahblahblah12233496100% (1)
- PMD Overwievrev - 6Document17 pagesPMD Overwievrev - 6shawky allamNo ratings yet
- Shop audit report with appliance brand and model detailsDocument4 pagesShop audit report with appliance brand and model detailsfadhel nurmidinNo ratings yet
- 10 eSCO-IoT-ch6-v4Document32 pages10 eSCO-IoT-ch6-v4Yahya HajaliNo ratings yet
- 114 CodeInspectorDocument28 pages114 CodeInspectorAbhishek KumarNo ratings yet