You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Sampul Cable CalculationDocument1 pageSampul Cable CalculationmrusdiantoNo ratings yet
- Linear Programming - SolverDocument34 pagesLinear Programming - SolvermrusdiantoNo ratings yet
- Purchasing ExamplesDocument11 pagesPurchasing ExamplesArunabha SahaNo ratings yet
- Scheduling ExamplesDocument18 pagesScheduling ExamplesArunabha SahaNo ratings yet
- Production ExamplesDocument12 pagesProduction ExamplesVibhuti BatraNo ratings yet
- Cable CalculationDocument14 pagesCable CalculationmrusdiantoNo ratings yet
- Distribution ExamplesDocument16 pagesDistribution ExamplesVivek KatyalNo ratings yet
- Finance ExamplesDocument15 pagesFinance ExamplesJuanArturoBeltránSánchezNo ratings yet
- R E V I E W: Presented by MR Teguh HandokoDocument4 pagesR E V I E W: Presented by MR Teguh HandokomrusdiantoNo ratings yet
- MatlabDocument7 pagesMatlabmrusdiantoNo ratings yet
- Tipe Document: List Jadwal Kalibrasi Peralatan Tahun 2019 Section of Line Elins FM 4/5 MaintenanceDocument1 pageTipe Document: List Jadwal Kalibrasi Peralatan Tahun 2019 Section of Line Elins FM 4/5 MaintenancemrusdiantoNo ratings yet
- Forecast ReallllDocument9 pagesForecast ReallllmrusdiantoNo ratings yet
- FB 500 Company Analysis: Team 1Document14 pagesFB 500 Company Analysis: Team 1mrusdiantoNo ratings yet
- MatlabDocument1 pageMatlabmrusdiantoNo ratings yet
- Carbon Brush - Coal Mill Main DriveDocument2 pagesCarbon Brush - Coal Mill Main DrivemrusdiantoNo ratings yet
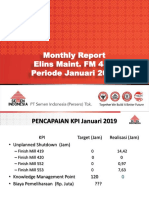
- Monthly Report Elins Maint. FM 4&5 Periode Januari 2019Document6 pagesMonthly Report Elins Maint. FM 4&5 Periode Januari 2019mrusdiantoNo ratings yet
- Regenerative TechnologyDocument8 pagesRegenerative TechnologymrusdiantoNo ratings yet
- Blood Pressure ChartDocument8 pagesBlood Pressure ChartmrusdiantoNo ratings yet
- Hasil Pengukuran Total Harmonics Distortion ER57Document4 pagesHasil Pengukuran Total Harmonics Distortion ER57mrusdiantoNo ratings yet
- Mount Rinjani Volcano Trekking PackageDocument4 pagesMount Rinjani Volcano Trekking PackagemrusdiantoNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- NIOS Configuration Class: Course SummaryDocument2 pagesNIOS Configuration Class: Course SummaryforeverbikasNo ratings yet
- SQL NotesDocument42 pagesSQL NoteskumarNo ratings yet
- MS - BDA Lec - Recommendation Systems IDocument31 pagesMS - BDA Lec - Recommendation Systems IJasura HimeNo ratings yet
- Kriging InterpolationDocument49 pagesKriging InterpolationJimmy MaharadjaNo ratings yet
- Solid 186Document23 pagesSolid 186structure123No ratings yet
- Rangkuman OB Chapter 15 by MSS FEUIDocument7 pagesRangkuman OB Chapter 15 by MSS FEUICahyaning SatykaNo ratings yet
- Bar Coding Tubular ProductsDocument4 pagesBar Coding Tubular ProductsGusti PanjaitanNo ratings yet
- Literary Research Essay: Conformity and RebellionDocument2 pagesLiterary Research Essay: Conformity and Rebellioneliza025No ratings yet
- Waste Electrical and Electronic Equipment (WEEE) Disposal FormDocument2 pagesWaste Electrical and Electronic Equipment (WEEE) Disposal FormJake HurleyNo ratings yet
- Sir Josiah Stamp, The Science of Social AdjustmentDocument191 pagesSir Josiah Stamp, The Science of Social Adjustmentmaivin2No ratings yet
- Meta BK Behavioral Genet.2014-12Document36 pagesMeta BK Behavioral Genet.2014-12fazle100% (1)
- Csec It June 2010 QaDocument16 pagesCsec It June 2010 QaLisa B Arnold50% (2)
- Lecture15 Analysis of Single PilesDocument32 pagesLecture15 Analysis of Single PilesJulius Ceasar SanorjoNo ratings yet
- Vroom - Classic CitationDocument1 pageVroom - Classic CitationbarguilfNo ratings yet
- Power Point Exercise IDocument6 pagesPower Point Exercise IAze FerriolsNo ratings yet
- Newest CV Rhian 2016Document2 pagesNewest CV Rhian 2016api-317547058No ratings yet
- Cenizas de Izalco - Capitulos 1 Al 15Document26 pagesCenizas de Izalco - Capitulos 1 Al 15Gafriel100% (3)
- Def ReadingDocument1 pageDef ReadingJembus WedutNo ratings yet
- STM32 P407Document32 pagesSTM32 P407iker97wNo ratings yet
- PSD - Trilok - Kalyan Medicals - June 29, 17 - Business Proposal Ver 1Document7 pagesPSD - Trilok - Kalyan Medicals - June 29, 17 - Business Proposal Ver 1papuNo ratings yet
- General Biology 2 Midterms GRASPSDocument2 pagesGeneral Biology 2 Midterms GRASPSAlbert RoseteNo ratings yet
- Informatica Certification Prep ListDocument5 pagesInformatica Certification Prep ListRabindra P.SinghNo ratings yet
- A Project Report ON Smart Knowledge Provider: Under The Supervision Of: Submitted byDocument10 pagesA Project Report ON Smart Knowledge Provider: Under The Supervision Of: Submitted byPrince YadavNo ratings yet
- MOUNTAINDocument8 pagesMOUNTAINlara_sin_crof6873No ratings yet
- Working With DatabaseDocument105 pagesWorking With DatabaseTara Marie Robinson WhiteNo ratings yet
- A Survey On Existing Food Recommendation SystemsDocument3 pagesA Survey On Existing Food Recommendation SystemsIJSTENo ratings yet
- HRM ThreeshortcasesDocument4 pagesHRM ThreeshortcaseskhanmohsinjamilNo ratings yet
- Industrial PsychologyDocument4 pagesIndustrial PsychologyNeo VeloriaNo ratings yet
- Mets 6-8 129586 7Document3 pagesMets 6-8 129586 7api-218300695No ratings yet
- Intermediate Statistics Test Sample 2Document19 pagesIntermediate Statistics Test Sample 2muralidharan0% (1)