You might also like
- TBEM CII Exim Bank Award ComparisonDocument38 pagesTBEM CII Exim Bank Award ComparisonSamNo ratings yet
- Fire Safety Measures For Schools 2Document33 pagesFire Safety Measures For Schools 2kavitaNo ratings yet
- NTPC Safety PolicyDocument15 pagesNTPC Safety PolicySamNo ratings yet
- Presentation On Presentation On Plant Controls & Inst. Overview OF GGSR - Bathinda (CPP) GGS (C) Owner: M/S Hmel PMC: M/S EILDocument34 pagesPresentation On Presentation On Plant Controls & Inst. Overview OF GGSR - Bathinda (CPP) GGS (C) Owner: M/S Hmel PMC: M/S EILGunadevan ChandrasekaranNo ratings yet
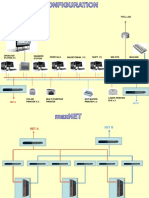
- ConfigurationDocument2 pagesConfigurationDeepak GuptaNo ratings yet
- Sagar Pandey AtpDocument44 pagesSagar Pandey AtpIshankNo ratings yet
- 09 ATRS - STDDocument45 pages09 ATRS - STDSam100% (1)
- ST - MaintenanceDocument26 pagesST - MaintenanceHayderr HassNo ratings yet
- Final PPT For BhelDocument16 pagesFinal PPT For BhelChandni Sharma0% (1)
- SCED Pilot Study Lowers Generation Costs by Rs. 2.59 Cr DailyDocument11 pagesSCED Pilot Study Lowers Generation Costs by Rs. 2.59 Cr DailyPRAGNo ratings yet
- Rel 4 TPP431 - 11 Rev F0 MaxDNA Functions and Features - P20Document21 pagesRel 4 TPP431 - 11 Rev F0 MaxDNA Functions and Features - P20ArjunNo ratings yet
- NPTIDocument2 pagesNPTIarijitlgspNo ratings yet
- Maxdna: The Industry Standard Process Control and Enterprise Management SystemDocument72 pagesMaxdna: The Industry Standard Process Control and Enterprise Management Systemvinayaniv984No ratings yet
- Digital Control System of Plant Gyanendra Sharma NPTI DelhiDocument128 pagesDigital Control System of Plant Gyanendra Sharma NPTI DelhiNPTINo ratings yet
- Multimedia CBTDocument4 pagesMultimedia CBTsesharamanaNo ratings yet
- Ug Cable Types & UseDocument25 pagesUg Cable Types & UseS K DHALNo ratings yet
- Turbine FundamentalDocument18 pagesTurbine FundamentalHamid ArizNo ratings yet
- Boiler & Heater Group Widest Range of Boilers & Fired HeatersDocument40 pagesBoiler & Heater Group Widest Range of Boilers & Fired Heatersmanupaul123No ratings yet
- FD ID Logic System Gyanendra Sharma NPTI DelhiDocument40 pagesFD ID Logic System Gyanendra Sharma NPTI DelhiNPTINo ratings yet
- Voltage Control Gyanendra Sharma Npti DelhiDocument56 pagesVoltage Control Gyanendra Sharma Npti DelhiNPTINo ratings yet
- Turbovisory SystemDocument2 pagesTurbovisory SystemLily Sharma100% (1)
- Thermal Power StationsDocument36 pagesThermal Power StationsSubhasis SenNo ratings yet
- Electric multi-turn actuators integral controlsDocument56 pagesElectric multi-turn actuators integral controlsJoel CatubayNo ratings yet
- FLUKE - PDM OverviewDocument5 pagesFLUKE - PDM OverviewofedulloNo ratings yet
- Introduction to Machine Protection FunctionsDocument14 pagesIntroduction to Machine Protection FunctionsAbdelsalam ElhaffarNo ratings yet
- 3 GT AuxiliariesDocument18 pages3 GT AuxiliariesSam100% (1)
- 135 MW TGSDocument19 pages135 MW TGSPrudhvi RajNo ratings yet
- Micom General Catalogue PDFDocument52 pagesMicom General Catalogue PDFnguyen sonNo ratings yet
- Coal plant flexibility options and challengesDocument32 pagesCoal plant flexibility options and challengesVeerabhadra Rao KorimilliNo ratings yet
- BHEL Haridwar Tarining Report Block IV Electrical EngineeringDocument37 pagesBHEL Haridwar Tarining Report Block IV Electrical EngineeringAnimesh Verma100% (8)
- Statutory Records To Be Maintained Under Factories ActDocument4 pagesStatutory Records To Be Maintained Under Factories ActShiv KumarNo ratings yet
- Governor TutorialDocument13 pagesGovernor TutorialWalid Fattah100% (1)
- Outage Management ProcessDocument2 pagesOutage Management ProcessSofian NasrNo ratings yet
- Rakesh Kumar: BHEL HaridwarDocument25 pagesRakesh Kumar: BHEL Haridwarparth038No ratings yet
- Turbine Protection Class at AnparaDocument41 pagesTurbine Protection Class at Anparabiju singh100% (1)
- Turbo Supervisory SystemDocument41 pagesTurbo Supervisory SystemJagadeesan SaiNo ratings yet
- Design of Low Power and Area Efficient Test Pattern Generator Using AluDocument32 pagesDesign of Low Power and Area Efficient Test Pattern Generator Using Aluselvi0412No ratings yet
- NTPC Vindhyachal ReportDocument13 pagesNTPC Vindhyachal Reportblackswan_07No ratings yet
- FW HeaterDocument93 pagesFW HeateridigitiNo ratings yet
- CII Excellence in Energy Management 2015 - RP-Sanjiv Goenka Group's 118 Year Old Power UtilityDocument12 pagesCII Excellence in Energy Management 2015 - RP-Sanjiv Goenka Group's 118 Year Old Power Utilitypsk.pranesh5520No ratings yet
- SWYD FundamentalDocument47 pagesSWYD FundamentalSamNo ratings yet
- 115 Flexibility Report WEBDocument116 pages115 Flexibility Report WEBThanasate PrasongsookNo ratings yet
- Vol1 12Document41 pagesVol1 12keerthi dayarathnaNo ratings yet
- Water Treatment Training Dakhni Expansion Project P J Sulfur Recovery UnitDocument15 pagesWater Treatment Training Dakhni Expansion Project P J Sulfur Recovery Unitnasir_engrNo ratings yet
- Boiler Notes 2Document42 pagesBoiler Notes 2Balakrishnan KannanNo ratings yet
- Spturbine Rolling CriteriasDocument26 pagesSpturbine Rolling CriteriasSANDEEP PATEL100% (1)
- Cable JointsDocument2 pagesCable Jointsneha061089No ratings yet
- OnM Best Practices MPPGCLDocument42 pagesOnM Best Practices MPPGCLJithinAbraham100% (1)
- Indian Electricity Act 2003 & Amendments: Presented By: Sanket Samantray NIT RourkelaDocument34 pagesIndian Electricity Act 2003 & Amendments: Presented By: Sanket Samantray NIT RourkelaAayushNo ratings yet
- Gen Write-Up 200MWDocument49 pagesGen Write-Up 200MWanon_862746578No ratings yet
- Power Test Code-Centrifugals PTC10Document3 pagesPower Test Code-Centrifugals PTC10Ashitava SenNo ratings yet
- FHC Prototype Modules at Electronics Corporation of India LtdDocument30 pagesFHC Prototype Modules at Electronics Corporation of India LtdTirumala Venkatesh100% (1)
- SUMMER VOCATIONAL TRAINING REPORT (BSEB, SCADA Patna)Document45 pagesSUMMER VOCATIONAL TRAINING REPORT (BSEB, SCADA Patna)Parwez Alam0% (1)
- Power System Automation: Eminar EportDocument16 pagesPower System Automation: Eminar EportAnurajNo ratings yet
- Scada IeeeDocument5 pagesScada IeeeVarsha PaiNo ratings yet
- Sachin Resume AutomationDocument3 pagesSachin Resume AutomationSachin KumarNo ratings yet
- Study and Implementation of Automation Projects in UtilitiesDocument39 pagesStudy and Implementation of Automation Projects in UtilitiesxyzzzzzNo ratings yet
- Project Report: PLC & ScadaDocument44 pagesProject Report: PLC & ScadaAhmed SamiNo ratings yet
- REMOTE MONITORING AND CONTROL OF SMART MICRO-GRID SYSTEMDocument13 pagesREMOTE MONITORING AND CONTROL OF SMART MICRO-GRID SYSTEMRahulNo ratings yet
- List of ExperimentsDocument1 pageList of Experimentsherokaboss1987No ratings yet
- NBA Accreditation & OBE Awareness ProgrammeDocument2 pagesNBA Accreditation & OBE Awareness Programmeherokaboss1987No ratings yet
- Nba WorkshopDocument4 pagesNba Workshopherokaboss1987No ratings yet
- Research Promotion Scheme (RPS)Document6 pagesResearch Promotion Scheme (RPS)herokaboss1987No ratings yet
- Revised PG PH.D Curriculam PDFDocument239 pagesRevised PG PH.D Curriculam PDFherokaboss1987No ratings yet
- Smart Grid Turn 2 Online QuestionDocument4 pagesSmart Grid Turn 2 Online Questionherokaboss1987No ratings yet
- Time Table Electrical Engineering ClassDocument17 pagesTime Table Electrical Engineering Classherokaboss1987No ratings yet
- 19th Exam ProspectusDocument28 pages19th Exam Prospectusherokaboss1987No ratings yet
- Research Promotion Scheme (RPS)Document6 pagesResearch Promotion Scheme (RPS)herokaboss1987No ratings yet
- 19th Exam ProspectusDocument28 pages19th Exam Prospectusherokaboss1987No ratings yet
- Truth Behind Ashok Gehlot's Yojna.Document7 pagesTruth Behind Ashok Gehlot's Yojna.herokaboss1987No ratings yet
- Govt Rolls Back Decision Over Faculty Recruitment in Engg Colleges - Times of IndiaDocument4 pagesGovt Rolls Back Decision Over Faculty Recruitment in Engg Colleges - Times of Indiaherokaboss1987No ratings yet
- PMU and Wide Area NetworkingDocument22 pagesPMU and Wide Area Networkingherokaboss1987No ratings yet
- AC to AC Converters Classification Includes Voltage Controllers Power CircuitsDocument26 pagesAC to AC Converters Classification Includes Voltage Controllers Power Circuitsherokaboss1987No ratings yet
- OutlineDocument18 pagesOutlineherokaboss1987No ratings yet
- 05594397Document5 pages05594397herokaboss1987No ratings yet
- 01677817Document7 pages01677817herokaboss1987No ratings yet
- 06364518Document5 pages06364518herokaboss1987No ratings yet
- Orthogonal Space-Time Block Coding PIC DetectorDocument5 pagesOrthogonal Space-Time Block Coding PIC Detectorherokaboss1987No ratings yet
- Entry Form For LaadliDocument3 pagesEntry Form For Laadliherokaboss1987No ratings yet
- T-29 A FormDocument14 pagesT-29 A Formherokaboss1987No ratings yet
- 04737448Document5 pages04737448herokaboss1987No ratings yet
- 06239627Document11 pages06239627herokaboss1987No ratings yet
- $ 1ryho 8solqn 5hfhlyhu Iru 60 (' (6/Vwhpv ZLWK 2uwkrjrqdo 6xe &kdqqho) HdwxuhDocument5 pages$ 1ryho 8solqn 5hfhlyhu Iru 60 (' (6/Vwhpv ZLWK 2uwkrjrqdo 6xe &kdqqho) Hdwxuhherokaboss1987No ratings yet
- Ncpeic Conference 5 RevDocument2 pagesNcpeic Conference 5 Revherokaboss1987No ratings yet
- ICORE-2010 Discusses Green Energy as the Energy Source of the FutureDocument1 pageICORE-2010 Discusses Green Energy as the Energy Source of the Futureherokaboss1987No ratings yet
- Recruitment Rules For Non Teaching Posts in National Institutes of TechnologyDocument38 pagesRecruitment Rules For Non Teaching Posts in National Institutes of Technologygmaruthi_1No ratings yet
- 10-09 GreenBldg PPTDocument72 pages10-09 GreenBldg PPTherokaboss1987No ratings yet
- Ncpeic Conference 5 RevDocument2 pagesNcpeic Conference 5 Revherokaboss1987No ratings yet
- Particle Swarm Optimization-Based RBF Neural Network Load Forecasting ModelDocument4 pagesParticle Swarm Optimization-Based RBF Neural Network Load Forecasting Modelherokaboss1987No ratings yet
- Chapter 2 Alumni Management System DraftDocument12 pagesChapter 2 Alumni Management System DraftJohn Adrian RegaladoNo ratings yet
- Chapter 1Document11 pagesChapter 1pkuranjeNo ratings yet
- Fti Reference GuideDocument170 pagesFti Reference Guidepankaj1986pankNo ratings yet
- 10.7 Owncloud Admin ManualDocument641 pages10.7 Owncloud Admin ManualYansane MoustaphaNo ratings yet
- Design A DatabaseDocument65 pagesDesign A Databasemelkamu endaleNo ratings yet
- E-Commerce Client Server ArchitectureDocument29 pagesE-Commerce Client Server ArchitectureVipul MaheshwariNo ratings yet
- International Journal of Management (Ijm) : ©iaemeDocument7 pagesInternational Journal of Management (Ijm) : ©iaemeIAEME PublicationNo ratings yet
- CPP106-MODULE - 9 - 2ndSEM - Data - Modelling (1) (20230504171831)Document9 pagesCPP106-MODULE - 9 - 2ndSEM - Data - Modelling (1) (20230504171831)Ivan HermosillaNo ratings yet
- SQL Project With CodingsDocument53 pagesSQL Project With CodingsAnuj SharmaNo ratings yet
- Wakanda Studio Ref Guide v1 BetaDocument249 pagesWakanda Studio Ref Guide v1 Betarnbd12No ratings yet
- Ps10x Import and Export User GuideDocument109 pagesPs10x Import and Export User GuideAugusto Sotomayor MarrujoNo ratings yet
- Web3: The Next Internet RevolutionDocument12 pagesWeb3: The Next Internet RevolutionClaudioNo ratings yet
- Xavier Institute of Social Service: Assignment On Performance Management SystemDocument10 pagesXavier Institute of Social Service: Assignment On Performance Management SystemDeeksha SinghNo ratings yet
- Apress Procedural Programming With PostgreSQLDocument326 pagesApress Procedural Programming With PostgreSQLheartbleed.exeNo ratings yet
- Production Support Estimation WhitepaperDocument10 pagesProduction Support Estimation Whitepaperpanv_5254100% (1)
- Record For NewDocument128 pagesRecord For Newvikas donthulaNo ratings yet
- Oracle HRMS FundamentalsDocument398 pagesOracle HRMS FundamentalssourabhparandeNo ratings yet
- TOAD SQL Loader OverviewDocument21 pagesTOAD SQL Loader Overviewsmruti_2012No ratings yet
- PgmanagerDocument2 pagesPgmanagerOlegOlegNo ratings yet
- Blackboard Manage Data SourcesDocument52 pagesBlackboard Manage Data SourcesAlexToaderNo ratings yet
- Data MiningDocument53 pagesData MiningMysti QueNo ratings yet
- Track Smart Buses in Real-Time with Android AppDocument14 pagesTrack Smart Buses in Real-Time with Android AppMadhuraNo ratings yet
- Step NCDocument30 pagesStep NCEng M G ElkhateebNo ratings yet
- GPS Track Final ProposalDocument19 pagesGPS Track Final ProposalJC MoralbaNo ratings yet
- Bca405P - Visual Programming Lab: Bangalore University BCA ProgramDocument2 pagesBca405P - Visual Programming Lab: Bangalore University BCA ProgramManoj BENo ratings yet
- PM 4 DataDocument6 pagesPM 4 DataSyed Muzammiel100% (1)
- Database Transactional Event Queues and Advanced Queuing Users GuideDocument546 pagesDatabase Transactional Event Queues and Advanced Queuing Users GuideNikolya SmirnoffNo ratings yet
- AXIS Camera Station Installation and Migration Guide: User ManualDocument7 pagesAXIS Camera Station Installation and Migration Guide: User ManualCORAL ALONSONo ratings yet
- Software Requirements Specification (SRS)Document14 pagesSoftware Requirements Specification (SRS)Rahul SharmaNo ratings yet
- Data Communication Basics CH 7Document27 pagesData Communication Basics CH 7Ukasha MohammednurNo ratings yet