Professional Documents
Culture Documents
Automatism o
Uploaded by
Cinthya EstudilloCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Automatism o
Uploaded by
Cinthya EstudilloCopyright:
Available Formats
AUTOMATISMO 1.1.
INTRODUCCION
La automatizacin de una mquina o proceso productivo simple tiene como consecuencia la liberacin fsica y mental del hombre de dicha labor. Se denomina automatismo al dispositivo fsico que realiza esta funcin controlando su funcionamiento. Los aparatos de conexin y los auxiliares automticos de mando son los que principalmente realizan esta funcin (UNE 21-302-78 y 20-109-81). 1.2. PRINCIPIO DE UN SISTEMA AUTOMATICO Todo sistema automtico por simple que ste sea se basa en el concepto de bucle o lazo. tal y como se representa en la Figura I.l.
EI siguiente ejemplo de un automatismo en lgica cableada nos ayuda a su comprensin. Sea una taladradora (Figura 1.2) compuesta por: Un motor B de traslacin con dos sentidos de marcha, bajada y subida, accionado por dos contactores, K3 y K4, respectivamente. Un motor A de rotacin de la broca, con dos sentidos de giro: derecha e izquierda, accionado por dos contactores. Kl y K2, respectivamente. Dos finales de carrera: FCl de puesta en marcha para realizar el taladro y FC2 de final del mismo. Pulsadores de marcha y paro, protecciones, temporizadores, sealizaciones, etc.
El funcionamiento de esta taladradora sera el que describimos a continuacin. En la posicin inicial y accionando el pulsador de marcha, con FCI cerrado. Se activan KI y K3 inicindose el descenso y giro a derechas de la broca y ejecutndose el taladro. A1 final del mismo se activa el FC2. Detenindose el proceso durante un tiempo determinado por el temporizador Tl. Al final del cual se activan K2 y K4, elevndose la broca y girando en sentido contrario hasta que FCI detiene el proceso y temporiza el T2, volvindose a repetir el ciclo. El posicionamiento y retirada de la pieza a taladrar es manual. En la Figura 1.3 se representa el lazo o bucle correspondiente al montaje de la taladradora del ejemplo y en donde se observa la similitud con el lazo de la Figura I.I.
La situacin fsica de los actuadores no tiene importancia desde el punto de vista de interpretacin del significado, ya que en nuestro caso estos contactores estaran situados en el armario de automatismo. mientras que en el caso de un automatismo con electrovlvulas stas se encontraran en la parte fsica de trabajo - mquina, aun cuando el mando de las mismas se encontrase en el armario de automatismo
. 1.3. FASES DE ESTUDIO EN LA ELABORACION DE UN AUTOMATISMO Para el desarrollo y elaboracin correcta de un automatismo, por el tcnico o equipo encargado de ello, es necesario conocer previamente los datos siguientes: a) b) c) Las especificaciones tcnicas del sistema o proceso a automatizar y su correcta interpretacin. La parte econmica asignada para no caer en el error de elaborar una buena opcin desde el punto de vista tcnico, pero inviable econmicamente. Los materiales, aparatos etc., existentes en el mercado que se van a utilizar para disear el automatismo. En este apartado es importante conocer tambin: Calidad de la informacin tcnica de los equipos. Disponibilidad y rapidez en cuanto a recambios y asistencia tcnica.
El organigrama de la Figura 1.4 representa el procedimiento general o fases ms utilizado para el estudio de los automatismos. A continuacin se va a estudiar cada uno de los apartados descritos: a) Estudio previo. Es importante antes de acometer cualquier estudio medianamente serio de un automatismo el conocer con el mayor detalle posible las caractersticas- el funcionamiento, las distintas funciones, etc., de la mquina o proceso a automatizar; esto lo obtenemos de las especificaciones funcionales, sta es la base mnima a partir de la cual
podremos iniciar el siguiente paso, es decir, estudiar cules son los elementos ms idneos para la construccin del automatismo. b) Estudio tcnico econmico: Es la parte tcnica de especificaciones del automatismo: relacin de materiales, aparatos, su adaptacin al sistema y al entorno en el que se haya inscrito, etc. Tambin aqu se ha de valorar la parte operativa del comporta miento del automatismo en todos sus aspectos, como mantenimiento, fiabilidad, etctera. Es obvio que la valoracin econmica, que ser funcin directa de las prestaciones del mismo, ha de quedar incluida en esta parte del estudio. c) Decisin final: En el apartado anterior se han debido estudiar las dos posibilidades u opciones tecnolgicas generales posibles: lgica cableado y lgica programada. Con esta informacin y previa elaboracin de los parmetros que se consideren necesarios tener en cuenta, se procede al anlisis del problema. Los parmetros que se deben valorar para una decisin correcta pueden ser muchos y variados, algunos de los cuales sern especficos en funcin del problema concreto que se va a resolver, pero otros sern comunes, tales como los siguientes: Ventajas e inconvenientes que se le asignan a cada opcin en relacin a su fiabilidad, vida media y mantenimiento. Posibilidades de ampliacin y de aprovechamiento de lo existente en cada caso. Posibilidades econmicas y rentabilidad de la inversin realizada en cada opcin. Ahorro desde el punto de vista de necesidades para su manejo y mantenimiento. Una vez realizado este anlisis slo queda adoptar la solucin final elegida. 1:4. OPCIONES TECNOLOGICAS El Cuadro 1.1 nos muestra las opciones tecnolgicas posibles derivadas de las dos generales: lgica cableada y lgica programada. La Figura 1.5 nos ayudar a decidirnos por la eleccin que ms se acomode a nuestro caso, en funcin de las caractersticas del mismo.
1.5. ORGANIGRAMAS PARA DESARROLLAR EL CONTROL DE UN PROCESO Los organigramas de las Figuras 1.6 y 1.7 pueden sernos de gran utilidad una vez nos hayamos decidido por la opcin tecnolgica ms apropiada, lgica cableada o lgica programada
Autmatas Programables (PLC's) 2.1. INTRODUCCION En los apartados que siguen se va a esbozar qu es, cmo funciona y para qu sirve un Autmata Programable.(PLC) Pretendemos poner de manifiesto sus bondades, pero sobre todo el objetivo de este apunte es el de aportar informacin general sobre estos equipos a fin de permitir la comprensin de su funcionamiento y el conocimiento de sus especificaciones tcnicas.
Una etapa, la de la lgica cableada, est terminando y otra, la de la lgica programada est afianzndose; es necesario tomar conciencia de la necesidad de subirse al carro de la nueva etapa lo antes posible, o sea, ya. 2.2. DEFINICION Se entiende por Controlador Lgico Programable (PLC), o Autmata Programable, a toda mquina electrnica, diseada para controlar en tiempo real y en medio industrial procesos secuenciales. Su manejo y programacin puede ser realizada por personal elctrico o electrnico sin conocimientos informticos.(Definicin de fines de los 70`s) Realiza funciones lgicas: series, paralelos, temporizaciones, contajes y otras ms potentes como clculos, regulaciones, etc. Tambin se le puede definir como una caja negra en la que existen unos terminales de entrada los que se conectarn pulsadores, finales de carrera, fotoclulas, detectores...; unos terminales de salida a los qu se conectarn bobinas de contactores, electrovlvulas, lmparas..; de tal forma que la actuacin de estos ltimos est en funcin de las seales d entrada que estn activadas en cada momento segn el programa almacenado. Esto quiere decir que los elementos tradicionales como rels auxiliares, rels de enclavamiento, temporizadores, contadores..., son internos. La tarea del usuario se reduce a realizar el programa, que no es ms que la relacin entre las seales de entrada que se tienen que cumplir para activar cada salida. 2.3. ANTECEDENTES E HISTORIA El desafo constante que toda industria tiene planteado para ser competitiva ha sido el motor impulsor del desarrollo de nuevas tecnologas para conseguir una mayor productividad. Debido a que ciertas etapas en los procesos de fabricacin se realizan en ambientes nocivos para la salud, con gases txicos, ruidos, temperaturas extremadamente altas o bajas, etctera, unido a consideraciones de productividad, llev a pensar en la posibilidad de dejar ciertas tareas tediosas, repetitivas y peligrosas a un ente al que no pudieran afectarle las condiciones ambientales adversas: haba nacido la mquina y con ella la automatizacin. Surgieron empresas dedicadas al desarrollo de los elementos que hicieran posible tal automa6zacin; debido a que las mquinas eran diferentes y diferentes las maniobras a realizar, se hizo necesario crear unos elementos estndar que, mediante la combinacin de los mismos, el usuario pudiera realizar la secuencia de movimientos deseada para solucionar su problema de aplicacin particular.
Rels, temporizadores, contadores..., fueron y son los elementos con que se cuenta para realizar el control de cualquier mquina. Debido a la constante mejora de la calidad de estos elementos y a la demanda del mercado, que exiga mayor y mejor calidad en la produccin, se fue incrementando el nmero de etapas en los procesos de fabricacin controlados de forma automtica. Comenzaron a aparecer problemas: los armarios de maniobra o cajas en donde se coloca el conjunto de rels, temporizadores, etc., constitutivos de un control, se hacan cada vez ms y ms grandes, la probabilidad de avera era enorme, su localizacin, larga y complicada, el stock que el usuario se vea obligado a soportar era numeroso, y el costo del mismo se incrementaba cada vez ms. El desarrollo tecnolgico que trajeron los semiconductores primero y los circuitos integrados despus intentaron resolver el problema sustituyendo las funciones realizadas mediante rels por funciones realizadas con puertas lgicas. Con estos nuevos elementos se gan en fiabilidad y se redujo el problema del espacio, pero no as la deteccin de averas ni el problema del mantenimiento de un stock. De todas maneras subsista un problema: la falta de flexibilidad de los sistemas. Debido a las constantes modificaciones que las industrias se vean obligadas a realizar en sus instalaciones para la mejora de la productividad, los armarios de maniobra tenan que ser cambiados, con la consiguiente prdida de tiempo y el aumento del costo que ello produca. En 1968, Ford y General Motors impusieron a sus proveedores de automatismo unas especificaciones para la realizacin de un sistema de control electrnico para mquinas transfer. Este equipo deba ser fcilmente programable, sin recurrir a los computadores industriales ya en servicio en la industria. A medio camino entre estos microcomputadores y la lgica cableada aparecen los primeros modelos de Autmatas, tambin llamados controladores lgicos programables (PLC's). Limitados originalmente a los tratamientos de lgica secuencial, los Autmatas se desarrollaron rpidamente, y actualmente extienden sus aplicaciones al conjunto de sistemas de control de procesos y de mquinas. 2.4. CAMPOS DE APLICACION El PLC por sus especiales caractersticas de diseo tiene un campo de aplicacin muy extenso. La constante evolucin del hardware y software ampla continuamente este campo para poder satisfacer las necesidades que se detectan en el espectro de sus posibilidades reales.
Su utilizacin se da fundamentalmente en aquellas instalaciones en donde es necesario realizar procesos de maniobra, control, sealizacin, etc., por tanto su aplicacin abarca desde procesos de fabricacin industrial de cualquier tipo al de transformaciones industriales, control de instalaciones, etc. Sus reducidas dimensiones, la extremada facilidad de su montaje, la posibilidad de almacenar los programas para su posterior y rpida utilizacin, la modificacin o alteracin de los mismos, etc., hace que su e6cacia se aprecie fundamentalmente en procesos en que se producen necesidades tales como: Espacio reducido. Procesos de produccin peridicamente cambiantes. Procesos secuenciales. Maquinaria de procesos variables. Instalaciones de procesos complejos y amplios. Chequeo de programacin centralizada de las partes del proceso.
Ejemplos de aplicaciones generales podran ser los siguientes: a) Maniobra de mquinas Maquinaria industrial del mueble y madera. Maquinaria en procesos de grava, arena y cemento. Maquinaria en la industria del plstico. Mquinas - herramientas complejas. Maquinaria en procesos textiles y de confeccin. Maquinaria de ensamblaje. Mquinas transfer.
b) Maniobra de instalaciones Instalaciones de aire acondicionado, calefaccin, etc. Instalaciones de seguridad. Instalaciones de fro industrial. Instalaciones de almacenamiento y trasvase de cereales. Instalaciones de plantas embotelladoras. Instalaciones en la industria de automocin. Instalaciones de tratamientos trmicos. Instalaciones de plantas depuradoras de residuos. Instalaciones de cermica.
c) Sealizacin y control Chequeo de programas. Sealizacin del estado de procesos. 2.5. VENTAJAS E INCONVENIENTES DEL PLC No todos los Autmatas ofrecen las mismas ventajas sobre la lgica cableada, ello es debido, principalmente, a la variedad de modelos existentes en el mercado y a las innovaciones tcnicas que surgen constantemente. Tales consideraciones nos obligan a referirnos a las ventajas que proporciona un Autmata de tipo medio. 2.5.1. Ventajas del PLC Las condiciones favorables que presenta un PLC son las siguientes: 1. Menor tiempo empleado en la elaboracin de proyectos debido a que: No es necesario dibujar el esquema de contactos. No es necesario simplificar las ecuaciones lgicas, ya que, por lo general, la capacidad de almacenamiento del mdulo de memoria es lo suficientemente grande. La lista de materiales queda sensiblemente reducida, y al elaborar el presupuesto correspondiente eliminaremos parte del problema que supone el contar con diferentes proveedores, distintos plazos de entrega, etc. 2. 3. 4. 5. 6. 7. 8. Posibilidad de introducir modificaciones sin cambiar el cableado ni aadir aparatos. Mnimo espacio de ocupacin. Menor coste de mano de obra de la instalacin. Economa de mantenimiento. Adems de aumentar la fiabilidad del sistema, al eliminar contactos mviles, los mismos Autmatas pueden detectar e indicar averas. Posibilidad de gobernar varias mquinas con un mismo Autmata. Menor tiempo para la puesta en funcionamiento del proceso al quedar reducido el tiempo de cableado. Si por alguna razn la mquina queda fuera de servicio, el Autmata sigue siendo til para otra mquina o sistema de produccin.
2.5.2. Inconvenientes del PLC Como inconvenientes podramos hablar, en primer lugar, de que hace falta un programador, lo que obliga a adiestrar a uno de los tcnicos en tal sentido. Pero hay otro factor importante, como el costo inicial, que puede o no ser un inconveniente, segn las caractersticas del automatismo en cuestin. Dado que el PLC cubre ventajosamente un amplio espacio entre la lgica cableada y el microprocesador, es preciso que el proyectista lo conozca tanto en su amplitud como en sus limitaciones. Por tanto, aunque el coste inicial debe ser tenido en cuenta a la hora de decidirnos por uno u otro sistema, conviene analizar todos los dems factores para asegurarnos una decisin acertada.
Estructura de los Autmatas Programables
3.1. INTRODUCCION Este captulo est dedicado a conocer al Autmata en su parte fsica o hardware, no slo en su configuracin externa, sino tambin y fundamentalmente la parte interna. Creemos, y de ah la inclusin de este captulo, que un tcnico que se precie de manejar los Autmatas Programables no puede conformarse con realizar una buena programacin y conseguir un montaje y puesta en funcionamiento perfecto, debe, sobre todo, dejar de verlo como una caja negra y conocerlo tal cual es, como un equipo electrnico complejo montado en tarjetas especficas que controlan reas o bloques, realizando distintas funciones que unidas convenientemente dan como resultado el Autmata. Los que conozcan el hardware de los microordenadores personales observarn la similitud de estos circuitos con aqullos, por lo que su comprensin les resultar ms fcil. 3.2. ESTRUCTURA EXTERNA El trmino estructura externa o configuracin externa de un Autmata Programable se refiere al aspecto fsico exterior del mismo, bloques o elementos en que est dividido, etc. Desde su nacimiento y hasta nuestros das han sido varias las estructuras y configuraciones que han salido al mercado condicionadas no slo por el fabricante del mismo, sino por la tendencia existente en el rea al que perteneciese: europea o
norteamericana. Actualmente, son dos las estructuras ms significativas que existen en el mercado: Estructura compacta. Estructura modular. Las diferencias significativas entre ambas hacen que las analicemos por separado en los apartados siguientes. 3.2.1. Estructura compacta Este tipo de Autmatas se distingue por presentar en un solo bloque todos sus elementos, esto es, fuente de alimentacin, CPU, memorias, entradas/salidas, etc. En cuanto a su unidad de programacin, existen tres versiones: unidad fija o enchufable directamente en el Autmata; enchufable mediante cable y conector, o la posibilidad de ambas conexiones. Si la unidad de programacin es sustituida por un PC, nos encontraremos que la posibilidad de conexin del mismo ser mediante cable y conector. El montaje del Autmata al armario que ha de contenerlo se realiza por cualquiera de los sistemas conocidos: carril DIN, placa perforada, etc. 3.2.2. Estructura modular Como su nombre indica, la estructura de este tipo de Autmatas se divide en mdulos o partes del mismo que realizan funciones especficas. Aqu cabe hacer dos divisiones para distinguir entre las que denominaremos estructura americana y europea. a) Estructura americana. Se caracteriza por separar las E/S del resto del Autmata, de tal forma que en un bloque compacto estn reunidas las CPU, memoria de usuario o de programa y fuente de alimentacin, y separadamente las unidades de E/S en los bloques o tarjetas necesarias. b) Estructura europea. Su caracterstica principal es la de que existe un mdulo para cada funcin: fuente de alimentacin, CPU, entradas/salidas, etc. La unidad de programacin se une mediante cable y conector. La sujecin de los mismos se hace bien sobre carril DIN o placa perforada, bien sobre RACK, en donde va alojado el BUS externo de unin de los distintos mdulos que lo componen. 3.3. ESTRUCTURA O ARQUITECTURA INTERNA En este apartado vamos a estudiar la estructura interna del Autmata, o sea, las partes en que se ordena su conjunto fsico o hardware y las funciones y funcionamiento de cada una de ellas.
Los Autmatas Programables se componen esencialmente de tres bloques, tal y como se representa en la Figura 3.3. La Seccin de Entradas. La Unidad Central de Procesos o CPU. La Seccin de salidas.
a) La seccin de entradas, mediante el interfaz, adapta y codifica de forma comprensible por la CPU las seales procedentes de los dispositivos de entrada o captadores, esto es, pulsadores, finales de carrera, sensores, etc.; tambin tiene una misin de proteccin de los circuitos electrnicos internos del Autmata, realizando una separacin elctrica entre stos y los captadores. b) La unidad central de proceso (CPU) es, por decirlo as, la inteligencia del sistema, ya que mediante la interpretacin de las instrucciones del programa de usuario y en funcin de los valores de las entradas, activa las salidas deseadas. c) La seccin de salidas, mediante el interfaz, trabaja de forma inversa a la de entradas, es decir, decodifica las seales procedentes de la CPU, las amplifica y manda con ellas los dispositivos de salida o actuadores, como lmparas, rels, contactores, arrancadores, electrovlvulas, etc., aqu tambin existen unos interfaces de adaptacin a las salidas y de proteccin de circuitos internos. Con las partes descritas podemos decir que tenemos un Autmata, pero para que sea operativo son necesarios otros elementos tales como: La unidad de alimentacin. La unidad o consola de programacin. Los dispositivos perifricos. Interfaces.
En la Figura 3.4 se han incluido estos elementos.
d) La unidad de alimentacin o fuente de alimentacin adapta la tensin de red de 220V y 50 Hz a la de funcionamiento de los circuitos electrnicos internos del Autmata, as como a los dispositivos de entrada: 24 Vcc por ejemplo. e) La unidad de programacin. Hemos dicho que la CPU elabora las salidas en funcin de los estados de las entradas y de las instrucciones del programa de usuario, pero, cmo accede el usuario al interior de la CPU para cargar en memoria su programa?, la respuesta es mediante la unidad de programacin. En los Autmatas ms sencillos es un teclado con un display similar a una calculadora que cuando se quiere cargar un programa en la CPU se acopla a sta mediante un cable y un conector, o bien se enchufa directamente en la CPU. f) Perifricos o equipos perifricos, son aquellos elementos auxiliares, fsicamente independientes del Autmata, que se unen al mismo para realizar su funcin especfica y que amplan su campo de aplicacin o facilitan su uso. Como tales no intervienen directamente ni en la elaboracin ni en la ejecucin del programa. g) Interfaces o intertases, son aquellos circuitos o dispositivos electrnicos que permiten la conexin a la CPU de los elementos perifricos descritos.
Para una mejor comprensin del Autmata, en la Figura 3.5 se han representado en bloques separados, pero interrelacionados entre s cada una de las reas que conforman el conjunto de la Figura 3.4; esta figura puede aclararnos algunas dudas principalmente sobre la interconexin de dichas reas. La arquitectura de un Autmata Programable de la gama baja o media queda representada por la Figura 3.6. Esta arquitectura es la bsica de los Autmatas existiendo poca variacin de unos fabricantes a otros. Su representacin nos permite entender en mayor profundidad los circuitos que lo componen. Por ltimo, y para poder apreciar de una forma globalizada el conjunto formado por un Autmata Programable y su entorno se ha compuesto la Figura 3.7. Se han representado en la misma mediante la identificacin (a), (b), (c) y (d) las distintas posibilidades de conexin de equipos de programacin y sus posibilidades en cuanto a archivo de programas y lenguajes de programacin. A continuacin vamos a estudiar de una forma ms detallada las partes del Autmata ya descritas y las funciones ms importantes que realizan, lo que nos permitir lograr el objetivo de conocer a un nivel aceptable este equipo. Conocimientos de Electrnica Digital y Microprocesadores seran de gran ayuda para entender en mayor medida el funcionamiento.
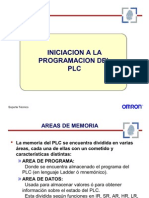
3.3.1. Memorias Llamamos memoria a cualquier dispositivo que nos permita almacenar informacin en forma de bits (ceros y unos). En nuestro caso nos referiremos a las memorias que utilizan como soporte elementos semiconductores. Tipos de memorias No todas las memorias son iguales; se distinguen dos tipos fundamentales de memorias fabricadas con semiconductores: a) Memoria RAM (Random Access Memory), memoria de acceso aleatorio o memoria de lectura escritura. En este tipo de memorias se pueden realizar los procesos de lectura y escritura por procedimiento elctrico, pero su informacin desaparece al faltarle la corriente. b) Memoria ROM (Read Only Memory), o memoria de slo lectura. En estas memorias se puede leer su contenido, pero no se puede escribir en ellas; los datos e instrucciones los graba el fabricante y el usuario no puede alterar su contenido. Aqu la informacin se mantiene ante la falta de corriente. Pero stas no son todas las memorias disponibles, pues como se observa en el Cuadro 3.1 existen otros tipos en las que los sistemas de programarlas, su borrado y su volatilidad o permanencia de la informacin marcan sus diferencias. Utilizacin de las memorias Dependiendo de la funcin asignada, as se utilizar un tipo de memoria u otra. a) Memoria de usuario. El programa de usuario normalmente se graba en memoria RAM, ya que no slo ha de ser ledo por el microprocesador sino que ha de poder ser variado cuando el usuario lo desee, utilizando la unidad de programacin. En algunos Autmatas, la memoria RAM se auxilia de una memoria sombra del tipo EEPROM. La desconexin de la alimentacin o un fallo de la misma borrara esta memoria, ya que al ser la RAM una memoria voltil necesita estar constantemente alimentada y es por ello que los Autmatas que la utilizan llevan incorporada una batera tampn que impide su borrado.
b) Memoria de la tabla de datos. La memoria de este rea tambin es del tipo RAM, y en ella se encuentra, por un lado, la imagen de los estados de las entradas y salidas y, por otro, los datos numricos y variables internas, como contadores, temporizadores, marcas, etc. c) Memoria y programa del sistema. Esta memoria, que junto con el procesador compo nen la CPU, se encuentra dividida en dos reas: la Ilamada memoria del sistema, que utiliza memoria RAM, y la que corresponde al programa del sistema o firmware, que lgicamente es un programa fijo grabado por el fabricante y, por tanto, el tipo de memoria utilizado es ROM. En algunos Autmatas se utiliza nicamente la EPROM, de tal forma que se puede modificar el programa memoria del sistema previo borrado del anterior con UV. d) Memorias EPROM y EEPROM. Independientemente de otras aplicaciones, algunas ya mencionadas en los prrafos anteriores, este tipo de memorias tiene gran aplicacin como memorias copia para grabacin y archivo de programas de usuario. En la Figura 3.8 quedan representadas todas las memorias presentes en un Autmata Programable, con indicacin de las funciones asignadas a cada una de ellas.
Estructuracin de las memorias Los chips de memoria suelen estar organizados en octetos y, a su vez, stos en palabras; cada palabra es normalmente de 16 bits, esto es, 2 bytes, es decir, cada posicin de memoria suele contener 16 bits de informacin, o lo que es lo mismo, dos bytes (Fig. 3.9). Cada palabra o registro define una instruccin o dato numrico o un grupo de estados de E/S. La cantidad de palabras de que dispone una memoria se expresa en K, y un K representa 1 024 bytes.
3.3.2. Unidad central de proceso, CPU La CPU (Central Processing Unit) est constituida por los elementos siguientes: procesador, memoria y circuitos auxiliares asociados. Procesador Est constituido por el microprocesador, P, el generador de impulsos de onda cuadrada o reloj y algn chip auxiliar. El procesador se monta sobre una placa de circuito impreso, en ella y junto al chip P se sitan todos aquellos circuitos integrados que lo componen, principalmente memorias ROM del sistema o firmware. En algunos tipos de Autmatas aqu se sitan tambin los chips de comunicacin con perifricos o de interconexin con el sistema de entradas/salidas. Microprocesador Es un circuito integrado (chip) a gran escala de integracin (LSI) que realiza una gran cantidad de operaciones, que podemos agrupar en: Operaciones de tipo lgico. Operaciones de tipo aritmtico. Operaciones de control de la transferencia de la informacin dentro del Autmata.
Los circuitos internos del P son de tres tipos: a) Circuitos de la unidad aritmtica y lgica o ALU. Es la parte del P donde se realizan los clculos y las decisiones lgicas para controlar el Autmata. b) Circuitos de la unidad de control a UC Organiza todas las tareas del P. As, por ejemplo, cuando una instruccin del programa codificada en cdigo mquina (ceros y unos) llega al P, la UC sabe, mediante una pequea memoria ROM que incluye, qu secuencia de seales tiene que emitir para que se ejecute la instruccin. c) Registras. Los registros del P son memorias en las que se almacenan temporalmente datos, instrucciones o direcciones mientras necesitan ser utilizados por el P. Los registros ms importantes de un P son los de instrucciones, datos, direcciones, acumulador, contador de programa, de trabajo y el de bandera o de estado. d) Buses. No son circuitos en s, sino zonas conductoras en paralelo que transmiten datos, direcciones, instrucciones, y seales de control entre las diferentes partes del P. Se puede hacer una diferencia entre Buses internos y externos. Los primeros unen entre si las diferentes partes del P, mientras que los segundos son pistas de circuito impreso que unen chips independientes. Los buses internos y externos son continuacin unos de los otros. La CPU se pondr en comunicacin con la tarjeta cuya direccin coincida con la combinacin del bus. Funciones de la CPU En la memoria ROM del sistema, el fabricante ha grabado una serie de programas ejecutivos fijos, firmware o software del sistema y es a estos programas a los que acceder el P para realizar las funciones ejecutivas que correspondan en funcin del tiempo en que trabaje. El software de sistema de cualquier Autmata consta de una serie de funciones bsicas que realiza en determinados tiempos de cada ciclo: en el inicio o conexin, durante el ciclo o ejecucin del programa y a la desconexin. Este software o programa del sistema es ligeramente variable para cada Autmata, pero, en general, contiene las siguientes funciones:
Supervisin y control de tiempo de ciclo (watchdog), tabla de datos, alimentacin, batera, etc. Autotest en la conexin y durante la ejecucin del programa. Inicio del ciclo de exploracin de programa y de la configuracin del conjunto. Generacin del ciclo base de tiempo. Comunicacin con perifricos y unidad de programacin. Hasta que el programa del sistema no ha ejecutado todas las acciones necesarias que le corresponden, no se inicia el ciclo de programa de usuario. CPU sin P No todos los Autmatas Programables utilizan el P como elemento base de la CPU, algunos fabricantes emplean como tal los dispositivos lgicos programables (DLP); o red de puertas lgicas (gate array) tambin llamados circuitos integrados de aplicacin especfica, en ingls, application specific integrated circuits, ASIC. El ASIC utilizado, por ejemplo, en los SEPTEC serie 90 de Sprecher+Shuh contiene 15 000 puertas lgicas.
Ciclo bsico de trabajo de la CPU El ciclo bsico de trabajo en la elaboracin del programa por parte de la CPU es el siguiente: Antes de iniciar el ciclo de ejecucin, el procesador, a travs del bus de datos, consulta el estado 0 1 de la seal de cada una de las entradas y las almacena en los registros de la memoria de entradas, esto es, en la zona de entradas de la memoria de la tabla de datos. Esta situacin se mantiene durante todo el ciclo del programa. A continuacin, el procesador accede y elabora las sucesivas instrucciones del programa, realizando las concatenaciones correspondientes de los operandos de estas instrucciones. Seguidamente asigna el estado de seal a los registros de las salidas de acuerdo a la concatenacin anterior indicando si dicha salida ha o no de activarse, situndola en la zona de salida de la tabla de datos.
Al final del ciclo, una vez concluida la elaboracin del programa asigna los estados de las seales de entrada a los terminales de entrada y los de salida a las salidas ejecutando el estado 0 1 en estas ltimas. Esta asignacin se mantiene hasta el final del siguiente ciclo en el que se actualizan las mismas. Dada la velocidad con que se realiza cada ciclo, del orden de 5 a 10 ms/1 K instrucciones, se puede decir que las salidas se ejecutan en funcin de las variables de entrada prcticamente en tiempo real. La Figura 3.10 representa el ciclo bsico de trabajo de un Autmata Programable.
3.3.3. Unidades de Entrada - Salida (E/S) Son los dispositivos bsicos por donde se toma la informacin de los captadores, en el caso de las entradas, y por donde se realiza la activacin de los actuadores, en las salidas. En los Autmatas compactos, las E/S estn situadas en un solo bloque junto con el resto del Autmata. En los modulares, las E/S son mdulos o tarjetas independientes con varias E/S, y que Se acoplan al bus de datos por medio de su conductor y conector correspondiente, o bien a un bastidor o rack, que le proporciona dicha conexin al bus y su soporte mecnico. Funciones de las unidades de E/S Las funciones principales son el adaptar las tensiones e intensidades de trabajo de los captadores y actuadores a las de trabajo de los circuitos electrnicos del Autmata; realizar una separacin elctrica entre los circuitos lgicos de los de potencia, generalmente a travs de optoacopladores, y proporcionar el medio de identificacin de los captadores y actuadores ante el procesador. Entradas Las entradas son fcilmente identificables, ya que se caracterizan fsicamente por sus bornes para acoplar los dispositivos de entrada o captadores por su numeracin, y por su identificacin INPUT o ENTRADA; llevan adems una indicacin luminosa de activado por medio de un diodo LED. En cuanto a su tensin, las entradas pueden ser de tres tipos: Libres de tensin. A corriente continua. A corriente alterna. En cuanto al tipo de seal que reciben, stas pueden ser: analgicas y digitales. a) Analgicas Cuando la magnitud que se acopla a la entrada corresponde a una medida de, por ejemplo, presin, temperatura, velocidad, etc., esto es, analgica, es necesario disponer de este tipo de mdulo de entrada. Su principio de funcionamiento se basa en la conversin de la seal analgica a cdigo binario mediante un convertidor analgico-digital (A/D). A continuacin figura un ejemplo con los parmetros ms significativos de este tipo de mdulos.
La resolucin de 12 bits se utiliza generalmente cuando las aplicaciones son de alta precisin. b) Digitales Son las ms utilizadas y corresponden a una seal de entrada todo o nada, esto es, a un nivel de tensin o a la ausencia de la misma. Ejemplo de elementos de este tipo son los finales de carrera, interruptores, pulsadores, etc. La Figura 3.l l representa el esquema simplificado de un circuito de entrada por transistor del tipo NPN, y en el que destaca, como elemento principal, el optoacoplador.
Salidas La identificacin de las salidas se realiza igual que en las entradas, figurando en este caso la indicacin de OUTPUT o SALIDA. Es en las salidas donde se conectan o acoplan los dispositivos de salida o actuadores, e incluye un indicador luminoso LED de activado. Tres son los tipos de salidas que se pueden dar: A rel. A triac. A transistor. Mientras que la salida a transistor se utiliza cuando los actuadores son a c.c., las de rels y triacs suelen utilizarse para actuadores a c.a.
En cuanto a las intensidades que soportan cada una de las salidas, esta es variable, pero suele oscilar entre 0,5 y 2 A. A1 igual que en las entradas, las salidas pueden ser analgicas y digitales, si bien esta ltima es la ms utilizada. En las analgicas es necesario un convertidor digital analgico (D/A) que nos realice la funcin inversa a la de la entrada. La Figura 3.12 nos muestra el circuito de salida a triac, en el que tambin se ha incluido el circuito protector interno contra sobreintensidades.
3.3.4. Interfaces Son circuitos que permiten la comunicacin de !a CPU con el exterior llevando la informacin acerca del estado de las entradas y transmitiendo las rdenes de activacin de las salidas. Constan de enlaces del tipo RS-232 o RS-422, y efectan la comunicacin mediante el cdigo ASCII. Asimismo, permiten la introduccin, verificacin y depuracin del programa mediante la consola de programacin, as como la grabacin del programa a casete, en memoria EPROM, comunicacin con TRC (monitor), impresora, etc. 3.3.5. Equipos o unidades de programacin La unidad de programacin es el medio material del que se auxilia el programador para grabar o introducir en la memoria de usuario las instrucciones del programa. Pero esta unidad realiza otras tareas fundamentales.
Funciones principales La gama de funciones que son capaces de ejecutar los equipos de programacin son mltiples y variadas, aumentando el tipo de stas en razn directa a la complejidad del equipo. En este apartado slo se van a describir las principales, que son las siguientes: a) Programacin Introduccin de instrucciones (programa). Bsqueda de instrucciones o posiciones de memoria. Modificacin del programa: Borrado de instrucciones. Insercin de instrucciones. Modificacin de instrucciones. Deteccin de errores de sintaxis o formato. Visualizacin del programa de usuario o parte del mismo, contenido en la memoria de usuario. Forzamiento del estado de marcas, registros, contadores, temporizadores, etc. b) Grabacin de programas En cinta casete. En chip de memoria EPROM o EEPROM. En papel mediante impresora. En disquete mediante PC. c)Visualizacin y verificacin dinmica del programa Del programa o parte de l. De entradas y salidas. De temporizadores, contadores, registros, etc d) Modos de servicio STOP (off-line), o salidas en reposo. RUN (on-line), o ejecutando el programa. Otros modos intermedios como MONITOR, etc. Tipos Desde el punto de vista constructivo, podemos distinguir tres tipos principales:
a) Unidades tipo calculadora Son las ms comnmente utilizadas en los Autmatas de la gama baja; constan del correspondiente teclado, conmutador de modos, display de cristal lquido o siete segmentos de dos o ms lneas, as como de las entradas para la grabacin del programa de usuario. Puede ser totalmente independiente, ser enchufada directamente en la CPU, o con ambas posibilidades. En las de pocas lneas (2, 4) slo es posible escribir mnemnicos, pero en las de pantalla llamadas de programacin grfica pueden visualizarse algunas lneas de programa de lenguajes grficos, datos del programa, etc. b) Consola de programacin Est en una posicin intermedia entre la unidad tipo calculadora y el PC. Consta de pantalla de plasma o tipo similar y tamao suficiente para 20-30 lneas y 60-80 caracteres por lnea, as como teclado. A1 igual que el PC que se describe a continuacin, utiliza el software de programacin preciso para los lenguajes utilizados en el PLC, almacenando los programas en disquete. c) Unidad con PC Esta unidad que se adapta al Autmata mediante el interfaz correspondiente lleva incorporado un monitor de tubo de rayos catdicos (TRC), y realizan la misma funcin que la unidad de programacin normal, pero con mayores prestaciones, permitiendo visualizar. los esquemas o diagramas completos o partes importantes de los mismos. Este equipo incorpora el software necesario para poder trabajar en ms de un lenguaje de programacin, incluso realizar la transformacin de lenguajes. La grabacin de programas se realiza en disquete o disco duro, segn modelos del PC. Funcionamiento Las instrucciones que se introducen en la unidad de programacin no son directamente interpretables por el procesador, que se ha de auxiliar de un circuito intermedio llamado Compiler. Es, por tanto, el Compiler el elemento de unin entre el Autmata y la unidad de programacin. Su misin es la de traducir la informacin textual de la unidad de programacin a lenguaje mquina y viceversa mediante unos cdigos intermedios que son interpretados por un programa residente en el firmware.
3.3.6. Perifricos Como elementos auxiliares y fsicamente independientes del Autmata, los equipos perifricos realizan funciones concretas de gran importancia. El incremento que experimenta las prestaciones de los Autmatas hace que el nmero de perifricos aumente da a da para equipos de la misma gama, pero en general para un equipo de la gama baja podra decirse que son: Impresora, que permite obtener en papel el listado de instrucciones o programa de usuario, el de temporizadores, contadores, etc., utilizados, as como los esquemas correspondientes. Unidades de cinta o memoria, por medio de las cuales grabamos los programas en cinta casete o chips de memoria EPROM o EEPROM, respectivamente. Otros equipos que se utilizaran en la gama media o en algn caso en la gama baja serian: Monitores de tipo TRC. Lectores de cdigo de barras. Displays y teclados alfanumricos. Unidad de teclado y tests. Etctera.
3.3.7. Tamao de los Autmatas Programables La clasificacin de los PLC en cuanto a su tamao se realiza en funcin del nmero de sus entradas-salidas; son admitidos los tres grupos siguientes: 1. Gama baja. Hasta un mximo de 128 entradas-salidas. La memoria de usuario de que disponen suele alcanzar un valor mximo de 4 K instrucciones. 2. Gama media. De 128 a 512 entradas-salidas. La memoria de usuario de que disponen suele alcanzar un valor mximo de hasta 16 K instrucciones. 3. Gama alta. Ms de 512 entradas-salidas. Su memoria de usuario supera en algunos de ellos los 100 K. instrucciones.
3.3.8. Evolucin de los Autmatas Programables Algunas de las tendencias que se detectan en la evolucin de los mismos son: Empleo en mayor medida de memoria de tipo EPROM y EEPROM como sustituto de la RAM. Posibilidad de comunicacin mediante PC compatible para las tres gamas descritas. Hacerse normal la utilizacin de los P de 16 bits y tendencia a incorporar los de 32 bits. Utilizacin del sistema multiprocesador, con lo que se aumenta la velocidad en la ejecucin de programas, alcanzndose tiempos del orden de 1 ms/1 K instrucciones. Reduccin de su tamao al aumentar la densidad de integracin de los circuitos integrados y al utilizar algunos fabricantes los dispositivos lgicos programables (DLP) o gate anay. Incremento de prestaciones, entre otras del tipo autodiagnstico y autoverificacin. Mejora de los tipos de visualizacin de programas y de procesos. Perfeccionamiento y homogeneizacin de redes locales.
You might also like
- Amenaza de Parto PreterminoDocument5 pagesAmenaza de Parto PreterminoSergio ChangNo ratings yet
- LupusDocument8 pagesLupusAnthony Iglesias ObandoNo ratings yet
- 2011-Hidratacion en Niños QuemadosDocument3 pages2011-Hidratacion en Niños Quemadosposeidonpm100% (1)
- HCPCynthiaeDocument11 pagesHCPCynthiaeCinthya EstudilloNo ratings yet
- Historia ClínicaDocument15 pagesHistoria ClínicaCinthya EstudilloNo ratings yet
- Historia ClinicaDocument12 pagesHistoria Clinicadarkcon1994No ratings yet
- Medidas Inmediatas de Salvamento en Pacientes QuemadosDocument32 pagesMedidas Inmediatas de Salvamento en Pacientes QuemadosCinthya EstudilloNo ratings yet
- Compartimento Anterior de La PiernaDocument12 pagesCompartimento Anterior de La PiernaCinthya EstudilloNo ratings yet
- Cinthia DiscusionDocument4 pagesCinthia DiscusionCinthya EstudilloNo ratings yet
- Saltos y SubrutinasDocument10 pagesSaltos y SubrutinasArturoNo ratings yet
- En La Figura 1 Se Entregan NueveDocument2 pagesEn La Figura 1 Se Entregan Nuevesebastian espitiaNo ratings yet
- Control Continuo Con PLCDocument6 pagesControl Continuo Con PLCCesar Marron MattaNo ratings yet
- Programacion Del PLCDocument88 pagesProgramacion Del PLCJuan MontielNo ratings yet
- Examen Automatas Primer ParcialDocument3 pagesExamen Automatas Primer ParcialEmanuelNo ratings yet
- PLC I - Micrologix - 3 PDFDocument36 pagesPLC I - Micrologix - 3 PDFRoberto Carlos Urquiola AyalaNo ratings yet
- Manejo de Recetas para Un Alimentador Automático de Prensa HidraúlicaDocument73 pagesManejo de Recetas para Un Alimentador Automático de Prensa HidraúlicaMARCO ANTONIO HERNANDEZ GUTIERREZNo ratings yet
- Dc81225p01 PLC Manual Esp - Rev1Document20 pagesDc81225p01 PLC Manual Esp - Rev1RaulNo ratings yet
- Trabajo Final Automatizacion Por Modulo LogicoDocument22 pagesTrabajo Final Automatizacion Por Modulo LogicoSR Erik100% (5)
- 09 Proyecto Final PLC ADocument5 pages09 Proyecto Final PLC Ajack0% (1)
- Actividad Semana 2Document6 pagesActividad Semana 2Luis Fernando Duran GutierrezNo ratings yet
- Investigacion Sobre El PLCDocument26 pagesInvestigacion Sobre El PLCreynaldoNo ratings yet
- PLC Omron Cpm1aDocument9 pagesPLC Omron Cpm1aHenryJaramilloConstanteNo ratings yet
- Practica3 Configuracion y Uso de Entradas y Salidas Del PLC s7 1200Document17 pagesPractica3 Configuracion y Uso de Entradas y Salidas Del PLC s7 1200Hector J. Moscoso RoqueNo ratings yet
- Foro 2 - Elio - ArmasDocument2 pagesForo 2 - Elio - ArmasElioArmasNo ratings yet
- Twido Twdlcae40drfDocument38 pagesTwido Twdlcae40drfAldemar Andres GonzalezNo ratings yet
- Clasificacion AutomatismosDocument5 pagesClasificacion AutomatismosEliazar CalderonNo ratings yet
- Programación Básica de PLCDocument10 pagesProgramación Básica de PLCJordan Jarry Canales CcalloNo ratings yet
- Trabajo de Sensores de PLCDocument22 pagesTrabajo de Sensores de PLCRicardo VegaNo ratings yet
- Diseño e implementación de una mini planta industrialDocument120 pagesDiseño e implementación de una mini planta industrialsthefani zambranoNo ratings yet
- Catálogo de Cursos 2018 Interactivo PDFDocument72 pagesCatálogo de Cursos 2018 Interactivo PDFELEAZAR WILIBALDONo ratings yet
- InstrumentacionDocument2 pagesInstrumentacionyorkin santana meranNo ratings yet
- 6.1manual C&ISDocument14 pages6.1manual C&ISBernardo Esperanza EspejoNo ratings yet
- Informe 2 - SensoresDocument33 pagesInforme 2 - SensoresLuis Huamani LopezNo ratings yet
- Estructura Int y Ext Del PLCDocument2 pagesEstructura Int y Ext Del PLCAlejo Arboleda DuqueNo ratings yet
- Pid Aplicada en Tia PortalDocument7 pagesPid Aplicada en Tia PortalMartin Alvarez NapanNo ratings yet
- Practica-3 - 2020 B 37-48Document12 pagesPractica-3 - 2020 B 37-48Nimer Abel Rodriguez UroNo ratings yet
- Automatización Industrial: Neumática, Electroneumática y PLCDocument5 pagesAutomatización Industrial: Neumática, Electroneumática y PLCMarianoArguedasNo ratings yet
- ST Ti 027Document47 pagesST Ti 027Colombo ArancibiaNo ratings yet
- Automatización de control de temperatura en intercambiador de calorDocument44 pagesAutomatización de control de temperatura en intercambiador de calorJeyner PelechNo ratings yet