You might also like
- Palm ch9Document44 pagesPalm ch9Amjad ShahNo ratings yet
- Palm ch7Document28 pagesPalm ch7A Raheem SiddiquiNo ratings yet
- Palm ch6Document23 pagesPalm ch6A Raheem SiddiquiNo ratings yet
- Palm ch5Document63 pagesPalm ch5A Raheem SiddiquiNo ratings yet
- Palm ch2Document22 pagesPalm ch2A Raheem SiddiquiNo ratings yet
- Palm ch3Document19 pagesPalm ch3A Raheem SiddiquiNo ratings yet
- Palm ch4Document36 pagesPalm ch4A Raheem Siddiqui100% (1)
- Palm ch1Document25 pagesPalm ch1A Raheem SiddiquiNo ratings yet
- HW1 Feb1 2012Document1 pageHW1 Feb1 2012A Raheem SiddiquiNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Spiritual Science ResearchDocument9 pagesSpiritual Science Research5joanNo ratings yet
- Universal Current SensorsDocument21 pagesUniversal Current SensorsKarthik SD67% (6)
- Difraksi FresnelDocument4 pagesDifraksi FresnelRafli YusrizhaNo ratings yet
- Chemical Solution Density & ViscosityDocument18 pagesChemical Solution Density & ViscosityLee JianNo ratings yet
- ANALYSIS OF PIPELINE STRESS IN GEOTHERMAL PIPING SYSTEMDocument15 pagesANALYSIS OF PIPELINE STRESS IN GEOTHERMAL PIPING SYSTEMAbdul Haris SiregarNo ratings yet
- Numerical investigation of RC beam-column connections under monotonic loadsDocument8 pagesNumerical investigation of RC beam-column connections under monotonic loadsCarter KandouNo ratings yet
- Earthquake Loads Calculation - NSCP 2015Document2 pagesEarthquake Loads Calculation - NSCP 2015Bhong LucenecioNo ratings yet
- Schäffer - 1996 - Second-Order Wavemaker Theory For Irregular Waves - Ocean Engineering-AnnotatedDocument42 pagesSchäffer - 1996 - Second-Order Wavemaker Theory For Irregular Waves - Ocean Engineering-AnnotatedSherlin Prem Nishold S oe13d015No ratings yet
- Projectile MotionDocument15 pagesProjectile MotionAlina PetrușNo ratings yet
- Lecture On Thermoelectric EffectDocument16 pagesLecture On Thermoelectric EffectjacobNo ratings yet
- Introduction EM Waves WorksheetDocument3 pagesIntroduction EM Waves WorksheetUmer AbdullahNo ratings yet
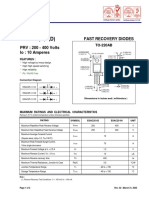
- ESAC25 (C, N, D) : Fast Recovery Diodes PRV: 200 - 400 Volts Io: 10 AmperesDocument2 pagesESAC25 (C, N, D) : Fast Recovery Diodes PRV: 200 - 400 Volts Io: 10 AmperesCarlos David MarquezNo ratings yet
- Forces and Momentum: Relating Impulse and Momentum to Collision of ObjectsDocument6 pagesForces and Momentum: Relating Impulse and Momentum to Collision of ObjectstolisNo ratings yet
- Properties of Pure SubstanceDocument26 pagesProperties of Pure SubstanceMahadi HasanNo ratings yet
- Homework 3 FebDocument42 pagesHomework 3 FebEmmanuel Olowosulu100% (3)
- Thesis W QuakDocument178 pagesThesis W Quakdr_kh_ahmedNo ratings yet
- Lesson 7 - Winglets, Raked Wingtips, Vortices, DragDocument38 pagesLesson 7 - Winglets, Raked Wingtips, Vortices, Dragaahsan345No ratings yet
- MV Cables Data Sheet - SampleDocument5 pagesMV Cables Data Sheet - SampleAvoor KhanNo ratings yet
- Vibration Measurement and Analysis FundamentalsDocument28 pagesVibration Measurement and Analysis FundamentalsGilbertoAndresDuarteNo ratings yet
- Siemens Vacumm Contactor 3tl6Document15 pagesSiemens Vacumm Contactor 3tl6Yong Ee VonnNo ratings yet
- Fundamentals of Physics Sixth Edition: Halliday Resnick WalkerDocument5 pagesFundamentals of Physics Sixth Edition: Halliday Resnick WalkerAhmar KhanNo ratings yet
- M2A2Document2 pagesM2A2valkyNo ratings yet
- RF Behaviour of Passive ComponentsDocument4 pagesRF Behaviour of Passive ComponentsAmbbiga JaiNo ratings yet
- Statics Homework ProblemsDocument4 pagesStatics Homework ProblemskangkongNo ratings yet
- Comp 2020 Btest-7 Set A PDFDocument43 pagesComp 2020 Btest-7 Set A PDFAYUSH NAIKNo ratings yet
- 2D Analysis of Naca-2406 Airfoil by Ansys and XfoilDocument10 pages2D Analysis of Naca-2406 Airfoil by Ansys and XfoilPrabowo Galih MNo ratings yet
- Improved Reactive Power Capability With Grid Connected Doubly Fed Induction GeneratorDocument14 pagesImproved Reactive Power Capability With Grid Connected Doubly Fed Induction GeneratorUday Wankar100% (2)
- Reading2D Spectrum PDFDocument6 pagesReading2D Spectrum PDFRaihan Uchiha100% (1)
- HS Physics EM II Year Learning MaterialDocument43 pagesHS Physics EM II Year Learning MaterialNidhi100% (3)
- Notes LT3Document16 pagesNotes LT3osmanfıratNo ratings yet