You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- MI MI Samsung Samsung Samsung: 9D Full Glus Tempered Glass Model ListDocument4 pagesMI MI Samsung Samsung Samsung: 9D Full Glus Tempered Glass Model ListRAHUL X WORLDNo ratings yet
- Realidad Aumentada Industria 4.0Document5 pagesRealidad Aumentada Industria 4.0Jhonattan JavierNo ratings yet
- LABSIM For PC Pro (Incl. CompTIA A+ (220-801 & 220-802) )Document3 pagesLABSIM For PC Pro (Incl. CompTIA A+ (220-801 & 220-802) )irshaad010% (5)
- Math Stage 6Document67 pagesMath Stage 6nancy.mohammed73No ratings yet
- Manual de Usuario Tc-p42x1x (Es) - PanasonicDocument124 pagesManual de Usuario Tc-p42x1x (Es) - PanasonicCiro lopexNo ratings yet
- CBC - Converter - HDMF 1.7 - CONTRI MP2Document3 pagesCBC - Converter - HDMF 1.7 - CONTRI MP2CICOSAT COLLEGES INC.No ratings yet
- Failure Modes and Effects Analysis: FMEA ProcedureDocument4 pagesFailure Modes and Effects Analysis: FMEA ProcedureVijay BhureNo ratings yet
- Spotfire Interview QuestionsDocument3 pagesSpotfire Interview QuestionsmitunvNo ratings yet
- Derek Stephen PrinceDocument13 pagesDerek Stephen Princesham shamNo ratings yet
- Java ProjectsDocument20 pagesJava Projectsashish8555100% (1)
- BscsDocument385 pagesBscsSerdar SemizNo ratings yet
- RASCI Qualifications Pack 0101 - Retail Store Ops AssistantDocument52 pagesRASCI Qualifications Pack 0101 - Retail Store Ops AssistantAbhijit DasNo ratings yet
- Install FileDocument44 pagesInstall FileGuram TurashviliNo ratings yet
- ABES Engineering College, Ghaziabad Classroom Photograph: (Ramanujan Block, First Floor)Document21 pagesABES Engineering College, Ghaziabad Classroom Photograph: (Ramanujan Block, First Floor)Avdhesh GuptaNo ratings yet
- Project Report First Phase @8 SuhanaDocument32 pagesProject Report First Phase @8 SuhanaShameer kNo ratings yet
- Designing Your Dream Life WorksheetDocument2 pagesDesigning Your Dream Life WorksheetPeter SmithNo ratings yet
- Industrial Production Counter Using At89S52 MicrocontrollerDocument24 pagesIndustrial Production Counter Using At89S52 MicrocontrollerrajkiritiNo ratings yet
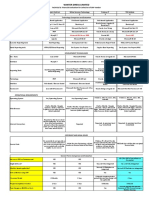
- Erp - Comparative StatementDocument5 pagesErp - Comparative StatementRafsanjani SamirNo ratings yet
- Installation and Operation Manual: GS16 Gas Metering SystemDocument78 pagesInstallation and Operation Manual: GS16 Gas Metering SystemUsman Ali100% (1)
- All You Need To Know About Universal Journal (ACDOCA) - SAP S4 HANA (2020)Document16 pagesAll You Need To Know About Universal Journal (ACDOCA) - SAP S4 HANA (2020)gounazerty6No ratings yet
- Databases 2 Course MaterialDocument13 pagesDatabases 2 Course MaterialcyliteNo ratings yet
- Gps SysDocument202 pagesGps SysSuciu FlorinNo ratings yet
- 1r gu0AwhVEZEkPrp1aCjivtb5hvPgaj9Document76 pages1r gu0AwhVEZEkPrp1aCjivtb5hvPgaj919524 AlekhyaNo ratings yet
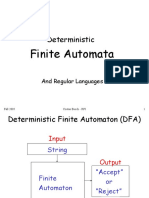
- Deterministic: Finite AutomataDocument56 pagesDeterministic: Finite AutomatatariqravianNo ratings yet
- DAC + TSD Sinergi ATM Himbara Via Jalin - Decomm B24 (Is Jalin) - 22000194Document32 pagesDAC + TSD Sinergi ATM Himbara Via Jalin - Decomm B24 (Is Jalin) - 22000194anggoro tri putrantoNo ratings yet
- Cavbase-Visualization and Database For Cavern Construction, Solution Mining Process, Brine Production and Product StorageDocument7 pagesCavbase-Visualization and Database For Cavern Construction, Solution Mining Process, Brine Production and Product StoragepbldzcmsNo ratings yet
- Chapter No 01 IntroductionDocument35 pagesChapter No 01 IntroductionAsad AltafNo ratings yet
- Activity 4Document2 pagesActivity 4JulliaJulAyalaBronNo ratings yet
- ISM 2021 Paper 67Document5 pagesISM 2021 Paper 67kotes jerryNo ratings yet
- My Sister Has Got ADocument15 pagesMy Sister Has Got Amahdy jilanNo ratings yet