You might also like
- Describing Yourself and Recipes in EnglishDocument2 pagesDescribing Yourself and Recipes in EnglishRaul Blandon100% (1)
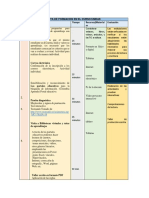
- Ruta de Formación en El CursoDocument2 pagesRuta de Formación en El Cursom_bueno028No ratings yet
- s2 Edp 02Document6 pagess2 Edp 02Alberto Manuel De La Hoz De La HozNo ratings yet
- Guía # 01 Ética 11°Document5 pagesGuía # 01 Ética 11°Julian ReyesNo ratings yet
- Tecnologia e Informatica Guia 2 PDFDocument8 pagesTecnologia e Informatica Guia 2 PDFyarleansNo ratings yet
- Modulo Tecnología e Informática Ciclo IV Grado OctavoDocument38 pagesModulo Tecnología e Informática Ciclo IV Grado OctavoGQUINTANCNo ratings yet
- Taller de Repaso para La Evaluacion Final Tecnologia 3 PeriodoDocument2 pagesTaller de Repaso para La Evaluacion Final Tecnologia 3 PeriodoFernanda Campo100% (1)
- GUIA N°1 Informatica e Historia de Los Computadores - Grado 6 - 2020Document16 pagesGUIA N°1 Informatica e Historia de Los Computadores - Grado 6 - 2020Luis Carlos Palacios MenaNo ratings yet
- v3 Guia 34 Gestion Comunitaria Año 2021Document690 pagesv3 Guia 34 Gestion Comunitaria Año 2021LUIS EDUARDO IZQUIERDO CARDONANo ratings yet
- Desempeños Edu. FisicaDocument15 pagesDesempeños Edu. FisicaDanny NeutaNo ratings yet
- SistemasOperativosSoftwareGuiaAprendizajeDocument7 pagesSistemasOperativosSoftwareGuiaAprendizajeEvaristo ArizaNo ratings yet
- 5 Primaria - ORGANIGRAMAS (SIN CLASE)Document2 pages5 Primaria - ORGANIGRAMAS (SIN CLASE)Felix MendozaNo ratings yet
- Capitulo 4 Diseño de La Propuesta de Accion IntervencionDocument8 pagesCapitulo 4 Diseño de La Propuesta de Accion IntervencionAndres Zarate ValdiviesoNo ratings yet
- Temas - Indicadores Periodo 2 Transición BLOGDocument1 pageTemas - Indicadores Periodo 2 Transición BLOGprofefercomfe100% (1)
- Plan de Aula Tecnologia e Informatica 2019Document42 pagesPlan de Aula Tecnologia e Informatica 2019wilson meza100% (1)
- Linea de Tiempo Sobre La Evolucion Del Concepto de Recurso Educativo Digital.01Document8 pagesLinea de Tiempo Sobre La Evolucion Del Concepto de Recurso Educativo Digital.01ALVARONo ratings yet
- Decreto 804 de 1995 etnoeducaciónDocument5 pagesDecreto 804 de 1995 etnoeducaciónEliana Remolina Torres100% (1)
- Taller GRADO 6 - AMBIENTAL Taller 2 Segundo PeriodoDocument8 pagesTaller GRADO 6 - AMBIENTAL Taller 2 Segundo PeriodoLeonardo Fabio Martinez M100% (1)
- La OracionDocument6 pagesLa Oracionpaulaissabella orellanogarnicaNo ratings yet
- Evaluacion Final Cuarto GradoDocument4 pagesEvaluacion Final Cuarto GradoYudit Blanco TrujilloNo ratings yet
- Evaluacion Del Red Lectura de Fabulas de Las Capsulas de Colombia Aprende Con El Modelo MccallDocument2 pagesEvaluacion Del Red Lectura de Fabulas de Las Capsulas de Colombia Aprende Con El Modelo MccallBerenice ContrerasNo ratings yet
- Malla Curricular Educacion Fisica y para El DeporteDocument15 pagesMalla Curricular Educacion Fisica y para El DeporteRoger Steven RuizNo ratings yet
- La hermandad y la fraternidad en la educación éticaDocument3 pagesLa hermandad y la fraternidad en la educación éticaDavid Alejandro Rodriguez ObandoNo ratings yet
- Evaluación de Ciancias Naturales I SemestreDocument1 pageEvaluación de Ciancias Naturales I SemestreWilly FreiteNo ratings yet
- Guia de Emprendimiento Grado SeptimoDocument5 pagesGuia de Emprendimiento Grado SeptimoLaura Vergel100% (2)
- Taller Musica Dad 6-7 Figuras - PentagramaDocument2 pagesTaller Musica Dad 6-7 Figuras - PentagramaRomero 1253No ratings yet
- Grado 4 Planeador SocialesDocument1 pageGrado 4 Planeador SocialesArnulfo TorresNo ratings yet
- Guia 5 Fisica Sexto PDFDocument4 pagesGuia 5 Fisica Sexto PDFSAMUEL MOMERO100% (1)
- PactoAulaGrado5Document16 pagesPactoAulaGrado5Sebastian GaviriaNo ratings yet
- Actividad # 4 Noveno Tres (Crear Crucigrama de Fundamentos de Computacion)Document2 pagesActividad # 4 Noveno Tres (Crear Crucigrama de Fundamentos de Computacion)javier mosqueraNo ratings yet
- Competencias Ciudadas Grado SextoDocument13 pagesCompetencias Ciudadas Grado SextoAndrés Antonio Bedoya CárdenasNo ratings yet
- Guia de Sexto Tecnología e Informática PDFDocument5 pagesGuia de Sexto Tecnología e Informática PDFherly manceraNo ratings yet
- GUIA N°3 - Componentes y Tipos de TecnologíaDocument4 pagesGUIA N°3 - Componentes y Tipos de Tecnologíajulaidys hernandezNo ratings yet
- GUIA TECNOLOGIA. RELACIONA DE LA TECNOLOGIA CON OTRAS CIENCIAS Ciclo IV PDFDocument7 pagesGUIA TECNOLOGIA. RELACIONA DE LA TECNOLOGIA CON OTRAS CIENCIAS Ciclo IV PDFHaydee Yamile Cobos ForeroNo ratings yet
- Proyecto InformaticaDocument28 pagesProyecto InformaticaValeria CriolloNo ratings yet
- Taller 1 Sobre WikisDocument1 pageTaller 1 Sobre WikisMariuxi BayasNo ratings yet
- Contribuciones EvaluacionDocument4 pagesContribuciones EvaluacionSergio Andrés Suarez CamposNo ratings yet
- Redes de Computo Guia de Informatica para Octavo GradoDocument11 pagesRedes de Computo Guia de Informatica para Octavo GradosofiamariajoNo ratings yet
- Test Parques NacionalesDocument5 pagesTest Parques NacionalespaticobarajasNo ratings yet
- Guia 1 Seguridad Alimentaria Grado Sexto IIperiodoDocument6 pagesGuia 1 Seguridad Alimentaria Grado Sexto IIperiodoBenavides Ortiz Luis Ernesto100% (1)
- 6-Inglés-Guía 9 PIAR LEIDY MORENODocument1 page6-Inglés-Guía 9 PIAR LEIDY MORENOWill MendozaNo ratings yet
- 9º Taller #1. - 2º Periodo. - Sistemas TecnologicosDocument4 pages9º Taller #1. - 2º Periodo. - Sistemas Tecnologicoscamilo santiago veraNo ratings yet
- Taller de Informática Preguntas Tipo ICFESDocument2 pagesTaller de Informática Preguntas Tipo ICFESYhara pinedaNo ratings yet
- Ejercicios Graficos en ExcelDocument2 pagesEjercicios Graficos en ExcelCarol GamarraNo ratings yet
- Guia SueñosDocument7 pagesGuia SueñosJeison Alexander CalderonNo ratings yet
- Informe #1 Entornos VirtualesDocument3 pagesInforme #1 Entornos Virtualesjanne herazoNo ratings yet
- Unidad Didactica de NovenoDocument80 pagesUnidad Didactica de NovenoParrucho EcbNo ratings yet
- Taller No 6 2016 El Teclado y Sus Partes P1 Grado 6Document2 pagesTaller No 6 2016 El Teclado y Sus Partes P1 Grado 6Josue CifuentesNo ratings yet
- Responsables Con El Ambiente - Tema 5 - EmprendimientoDocument5 pagesResponsables Con El Ambiente - Tema 5 - EmprendimientoMacross Bit Nick50% (2)
- Modulo Emprendimiento Grado 7 PDFDocument35 pagesModulo Emprendimiento Grado 7 PDFYRDZ TUTOSNo ratings yet
- Programa de Mantenimiento Correctivo y Preventivo de Los Equipos y Los Recursos para El AprendizajeDocument7 pagesPrograma de Mantenimiento Correctivo y Preventivo de Los Equipos y Los Recursos para El Aprendizajealba lucy burbanoNo ratings yet
- Plan de Mejoramiento 4-3 (Geometría y Estadística - 4º Periodo)Document4 pagesPlan de Mejoramiento 4-3 (Geometría y Estadística - 4º Periodo)Luis Felipe Valencia PérezNo ratings yet
- Matemáticas 5° - Unidad - 1 Guia 2 - Reconocimiento Potenciación RadicaciónDocument12 pagesMatemáticas 5° - Unidad - 1 Guia 2 - Reconocimiento Potenciación RadicaciónVíctor A. Pérez MuñozNo ratings yet
- Evaluación anual docente competencias desempeñoDocument7 pagesEvaluación anual docente competencias desempeñoDiego CarrilloNo ratings yet
- Taller #1 Cuarto Periodo Tenologia y Nuevo Ordem PDFDocument7 pagesTaller #1 Cuarto Periodo Tenologia y Nuevo Ordem PDFJuanes EstebanNo ratings yet
- Guia 5 Decimo Re Alimentacion de Artefactos Tecnologicos Semana 15Document2 pagesGuia 5 Decimo Re Alimentacion de Artefactos Tecnologicos Semana 15DANIEL SANTIAGO BARBOSA CÉSPEDESNo ratings yet
- Etica y Valores Somos DiferentesDocument18 pagesEtica y Valores Somos DiferentesJOHANA JANETH JARABA DEDE100% (1)
- PDF Taller de Tecnologia Grado 10 DDDocument3 pagesPDF Taller de Tecnologia Grado 10 DDRafael Castañeda duqueNo ratings yet
- Ensayo Sobre RoboticaDocument4 pagesEnsayo Sobre RoboticaJUANNo ratings yet
- Ia, Inteligencia Artificial, Unidad 5.Document46 pagesIa, Inteligencia Artificial, Unidad 5.Neutro Crew SneNo ratings yet
- TALLER No.2 ECUACIONES CUADRÁTICASDocument1 pageTALLER No.2 ECUACIONES CUADRÁTICASXaBy Lds OrtizNo ratings yet
- Actividad 3Document2 pagesActividad 3XaBy Lds OrtizNo ratings yet
- Los Problemas de Los Jóvenes en La ActualidadDocument2 pagesLos Problemas de Los Jóvenes en La ActualidadLuis Alexander Aponte Rojas100% (1)
- Pasado Presente y FuturoDocument2 pagesPasado Presente y FuturoXaBy Lds OrtizNo ratings yet
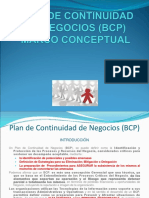
- Plan de Continuidad de Negocio (BCP) Marco ConceptualDocument12 pagesPlan de Continuidad de Negocio (BCP) Marco ConceptualaalfonsopNo ratings yet
- HojaVida-MatematicoDocument5 pagesHojaVida-MatematicoCristhian Montufar ValerNo ratings yet
- Tema 7 Las Fuerzas y Los Cambios de MovimientoDocument10 pagesTema 7 Las Fuerzas y Los Cambios de MovimientoLeonardo Renteria MarcuNo ratings yet
- Colegehu02 Act2Document2 pagesColegehu02 Act2Kissha RojanoNo ratings yet
- Civil - Notificacion de Sentencia de Divorcio Pedro La VegaDocument3 pagesCivil - Notificacion de Sentencia de Divorcio Pedro La VegaBryant SantiagoNo ratings yet
- Diagramas de ProcesoDocument11 pagesDiagramas de ProcesoAbraham Falcon GrandeNo ratings yet
- El Ser Humano y La NaturalezaDocument2 pagesEl Ser Humano y La Naturalezaandrea77% (13)
- CATALOGO Document Ales - El CirujanoDocument14 pagesCATALOGO Document Ales - El CirujanotrabajosebpNo ratings yet
- Formatos para RT 3 - Construyendo PeruDocument8 pagesFormatos para RT 3 - Construyendo PeruanitainaNo ratings yet
- Ventajas y desventajas de 5 dispositivos de entrada y salidaDocument2 pagesVentajas y desventajas de 5 dispositivos de entrada y salidaBarni Jose Angulo Montaña100% (1)
- Michel, M. P. C. T. MADUREZ AFECTIVA.Document30 pagesMichel, M. P. C. T. MADUREZ AFECTIVA.David Isaac RGNo ratings yet
- s1s - Introducción Al Analisis CombinatorioDocument6 pagess1s - Introducción Al Analisis CombinatorioCarlos V. Ninahuanca100% (1)
- Actividad 3 Calculo e Interpretacion de Indicadores FinancierosDocument5 pagesActividad 3 Calculo e Interpretacion de Indicadores FinancierosJuan Guillermo LópezNo ratings yet
- Arquitectura Colonial Del PerúDocument6 pagesArquitectura Colonial Del PerúErick ALdabaNo ratings yet
- Cap.6 Los Gerentes Como Tomadores de DecisionesDocument43 pagesCap.6 Los Gerentes Como Tomadores de DecisionesDaphaneLezcanoNo ratings yet
- Sistema RespiratorioDocument8 pagesSistema Respiratoriokristy mendoza chumbeNo ratings yet
- Diego Gómez 3Document5 pagesDiego Gómez 3Diego GomezNo ratings yet
- Inbani Bathroom Design Catalog - 2013Document173 pagesInbani Bathroom Design Catalog - 2013LIFENG FURNITURENo ratings yet
- Programacion Visual Con Java Parte 1Document73 pagesProgramacion Visual Con Java Parte 1Sergio Hernandez Ensuncho25% (4)
- Imprimir AuditoriaDocument15 pagesImprimir AuditoriaKaren Reyes0% (1)
- Aprendizajes Matemã¡ticosDocument29 pagesAprendizajes Matemã¡ticosTikaa EstampadosNo ratings yet
- Indicaciones Tarea 3Document2 pagesIndicaciones Tarea 3Daniela MatheusNo ratings yet
- Empresas Cuadri Comparativ0Document2 pagesEmpresas Cuadri Comparativ0Anna VegaNo ratings yet
- Actividad 6 - Lascano JenniferDocument7 pagesActividad 6 - Lascano JenniferJennifer PaolaNo ratings yet
- PAC Neonato 4 L2 Edited PDFDocument82 pagesPAC Neonato 4 L2 Edited PDFm.condealegriaNo ratings yet
- Bola PDFDocument1 pageBola PDFMendieta Giraldo EduNo ratings yet
- Informe 6Document14 pagesInforme 6hugojavier830% (1)
- Formato5a Mejoramiento de Carretera Santa Rosa de Pampan - Rio MarañonDocument5 pagesFormato5a Mejoramiento de Carretera Santa Rosa de Pampan - Rio MarañonricardoNo ratings yet
- Consultas sobre remuneraciones y funciones de concejales municipalesDocument32 pagesConsultas sobre remuneraciones y funciones de concejales municipalesYessiRojasNo ratings yet
- Comprensión lectora y diferencia entre tema e idea principalDocument6 pagesComprensión lectora y diferencia entre tema e idea principalGustavo SarmientoNo ratings yet