Professional Documents
Culture Documents
Apuntes MDS 2012-2
Uploaded by
Israel GonzálezCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Apuntes MDS 2012-2
Uploaded by
Israel GonzálezCopyright:
Available Formats
FUNDAMENTOS DE MECANICA DE SOLIDOS
MECANICA DE SOLIDOS
En toda construccin de ingeniera se debe definir el tamao fsico de las partes
componentes de una estructura, se les debe asignar dimensiones apropiadas para que resistan
las fuerzas reales o probables que se les apliquen. As las paredes de un recipiente a presin
deben tener la resistencia adecuada para soportar la presin interna; el eje de una maquina tiene
que ser del tamao adecuado para que transmita el par de rotacin que se requiera; un ala de un
aeroplano tiene que resistir con seguridad las cargas aerodinmicas que se pueden ejercer en ella
durante el vuelo o en el aterrizaje; un piso de un edificio debe tener resistencia suficiente y sin
embargo sufrir una deflexin excesiva, que en algunos casos podra ocasionar un
desaliniamiento del equipo de manufactura; o bien puede ocasionar agrietamiento del plafn de
yeso. Por ultimo, un miembro estructural puede ser tan delgado o esbelto que al sometrsele a
una carga de compresin se derrumbe por pandeo; esto es, la configuracin inicial de un
miembro tal puede llegar a ser inestable.
En el ejercicio de ingeniera se deben satisfacer todos los requisitos con un gasto mnimo de
material; pero a veces, el xito de una misin depende, aparte del costo, del peso de un sistema
como en el caso del diseo de satlites artificiales.
La mayor parte del contenido del curso es una teora tcnica de los cuerpos deformables y se
introducen hiptesis simplificadoras para facilitar una solucin razonable a los problemas
bsicos.
La mecnica de slidos interviene de manera destacada en todas las ramas de la ingeniera. Sus
mtodos son necesarios para los diseadores de submarinos; para el ingeniero civil que proyecta
puentes y edificios; para el ingeniero que proyecta vehculos espaciales, para el ingeniero en
minas y arquitectnicos que les interesen tambin las estructuras, para los ingenieros mecnicos
y qumicos que dependen de los procedimientos de esta materia para disear maquinaria y
recipientes a presin; para los metalurgistas que requieren de estos conocimientos de mecnica
de slidos a fin de saber como mejorar los materiales existentes, para el ingeniero electricista es
importante esta materia en virtud de la importancia de los aspectos de la ingeniera mecnica en
muchas partes del equipo elctrico. En consecuencia podemos concluir que la mecnica tcnica
de slidos, es una asignatura fundamental de un plan de estudios de ingeniera.
Este curso se limitara a abordar los temas ms sencillos de la materia puesto que es de carcter
introductoria. Sin embargo a pesar de la sencillez de los mtodos empleados las tcnicas
resultantes son notablemente tiles ya que se aplican a un gran nmero de problemas
tcnicamente importantes.
Este es un curso que no contiene una elevada cantidad de formulas, pero solo es posible
asimilarlo resolviendo numerosos problemas.
El principal problema de la mecnica de slidos es la investigacin de la resistencia interna y la
deformacin de un cuerpo slido a la accin de cargas, lo que implica, un estudio de la
naturaleza de las fuerzas que se originan dentro de un cuerpo para equilibrar el efecto de las
fuerzas aplicadas exteriormente. Para esto emplearemos el diagrama de cuerpo libre (DIBUJO
esquemtico completo del miembro o cuerpo que se va a investigar, en el que se indican las
fuerzas externas que actan sobre el cuerpo en sus puntos de aplicacin correspondientes).
Fuerzas Externas.- Todas aquellas que actan sobre el cuerpo, incluso las fuerzas reactivas que
ejercen los soportes y el peso propio del cuerpo.
Como un cuerpo en reposo estable est en equilibrio, las fuerzas que actan sobre el, satisfacen
las ecuaciones de equilibrio esttico.
= 0 Fx
= 0 Mx
= 0 Fy
= 0 My
= 0 Fz
= 0 Mz
Como la determinacin de las fuerzas internas, originadas por las fuerzas externas es
importante, nos valdremos del llamado mtodo de secciones.
Consideraremos un cuerpo en equilibrio al cual le hacemos un corte arbitrario para separarlo en
dos partes.
P
1
A
B P
3
P
4
P
2 D C
Ya que el cuerpo en conjunto esta en equilibrio, cualquier parte de l lo estar tambin.
P
1
P
3
S
1
S
1
S
2
S
2
S
3
S
3
P
2
P
4
Para mantener el equilibrio en tales partes de un cuerpo algunas fuerzas tendrn que actuar en la
seccin del corte.
Por lo tanto las fuerzas aplicadas exteriormente a un lado del corte arbitrario tienen que estar en
equilibrio con las fuerzas desarrolladas en la seccin del corte.
Es importante mencionar que los planos de corte se harn pasar segn una orientacin particular
para cumplir requisitos especiales.
Aunque algunos cuerpos no estn en equilibrio esttico, pueden estar en equilibrio dinmico y
reducirse a problemas de equilibrio esttico aplicando el principio de DAlambert que se basa
en la suposicin de que todos los cuerpos se pueden considerar en un estado instantneo de
equilibrio esttico.
Se calcula la aceleracin de la parte en cuestin y luego se le multiplica por las masas del
cuerpo lo que da una fuerza, la cual se aplica al cuerpo en forma directamente opuesta (misma
direccin pero sentido opuesto) a la aceleracin de su centro de masa, el problema dinmico se
reduce a orden esttico.
SECUENCIA PARA LA SOLUCION DE PROBLEMAS DE MECANICA DE SOLIDOS
1.- Se asla un miembro particular de una mquina o de elementos estructurales y se traza el
diagrama de cuerpo libre.
2.- Calcular el valor de las reacciones, con la aplicacin de las ecuaciones de la esttica o
condiciones de frontera, con las ecuaciones diferenciales apropiadas. En problemas
indeterminados, la esttica se complementa de condiciones cinemticas.
3.- En el punto en que se desee la magnitud del esfuerzo se hace pasar un plano de corte
perpendicular al eje del cuerpo y parte de este a uno u otro lado de la seccin, se separan
completamente.
4.- En la seccin que se investiga se determina el sistema de fuerzas internas necesarias para
mantener el equilibrio de la parte aislada. En general el sistema de fuerzas consta de una fuerza
axial, una fuerza cortante, un momento flexionante y un momento de torsin. Estas cantidades
se hallan considerando parte del elemento como cuerpo libre.
5.- Una vez resuelto en forma apropiada el sistema de fuerzas que actan en la seccin, las
formulas establecidas permitirn determinar las fuerzas en la seccin considerada.
6.- Si se sabe la magnitud del esfuerzo mximo en una seccin se podr especificar el material
apropiado para ella; o recprocamente si se conocen las propiedades fsicas de un material es
posible seleccionar un elemento de tamao adecuado.
7.- En algunos otros problemas, el conocimiento de la deformacin en una seccin arbitraria de
un elemento, originada por las fuerzas internas, permitir predecir la deformacin de la
estructura en conjunto y por tanto, si fuera necesario, disear elementos que no se flexionen o
comben excesivamente.
CAPITULO 2
FUERZA AXIAL, FUERZA CORTANTE Y MOVIMIENTO FLEXIONANTE
VIGA.- Es una barra sometida a la accin de fuerzas o pares situados en un plano que contiene a
su eje longitudinal. Se supone que las fuerzas actan perpendicularmente a su eje longitudinal.
Es un elemento estructural que tiene la longitud considerablemente mayor que las otras
dimensiones de su seccin transversal y que soporta cargas perpendiculares al eje de su seccin
transversal.
Las vigas pueden ser curvas o rectas.
TIPOS DE VIGAS
L L L
Vigas simplemente apoyadas Viga en voladizo
L
Viga doblemente empotrada Viga empotrada en un extremo y
simplemente apoyada en el otro
L L
1
L
2
L
3
Viga con voladizos Viga contina
CLASIFICACION DE ESTRUCTURAS SEGN SU ESTATICIDAD
TIPO Presentacin Esquemtica
Nmero de
Incgnitas
Nmero de
Ecuaciones
Estaticidad
a 3 3
Isosttica (Viga
simplemente apoyada)
b 5 3
Hiperesttica de segundo
grado (Viga continua)
c 2 3 Inestable
d 3 3
Isosttica (Viga en
voladizo)
e 6 3
Hiperesttica de tercer
grado (Viga doblemente
empotrada)
f 4 3
Hiperesttica de primer
grado (Viga en voladizo
con apoyo)
g 3 3 Isosttica
h
articulacin
4 4 Isosttica
i 7 3
Hiperesttica de cuarto
grado
j 5 5 Isosttica
TIPOS DE APOYO
Apoyo de rodillo o eslabn
Articulacin
Accin sobre
el cuerpo que
se asla
Eliminan eficazmente las fuerzas tangenciales de rozamiento; la reaccin resultante es normal a
la superficie de apoyo, o bien resiste una fuerza sobre una lnea de accin especfica.
Pasador: es capaz de resistir una fuerza que actu en cualquier direccin del plano normal al eje
del pasador. Un pasador que no gire libremente podr resistir tambin un par.
Con giro
Libre
~ ~ Rx
Ry
Rx
M
Ry
Empotramiento o apoyo fijo.- Puede resistir una fuerza en cualquier direccin y tambin la
accin de un par o momento; en otras palabras puede resistir una fuerza axial F, una fuerza
transversa V (fuerza Cortante) y un par M (momento flector) para impedir la rotacin.
Un momento Torsor.
Tx
y T
A M A
x
F
V
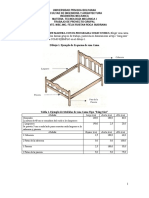
Ejemplo
El perno B se mantiene sujeto por una fuerza de agarre de 10 lb perpendicular a las mandibulas
del alicate que se ve en las figuras. Qu fuerza P debe aplicarse perpendicularmente a sus
mangos para suministrar la fuerza de agarre?
PENDIENTE DIBUJO SCANEARLO
Aplicando la expresin de equilibrio
= 0 M
0 87 . 4 10 98 . 1 = + xP x
De donde 07 . 4
87 . 4
8 . 19
= = P
Ejemplo
R
N
R
Ax
R
Ay
P
Ejemplo
Las mandibulas de una llave son de acero templado liso y para el grosor dado de la llave,
pueden soportar hasta 750 kp de fuerza concentrada contra la arista de la cabeza exagonal de un
tornillo sin que se dae la superficie. Calcule la fuerza mxima F correspondiente a un brazo de
palanca de 30 cm que puede aplicarse sin peligro a la llave. Suponga poco huelgo entre llave y
tornillo.
Ejemplo
Determinar la reaccion provocada por el clavo al tratar de extraerlo. Considerando que el
martillo rota en el punto A.
lb F 5 = , 12 = d , 4 = BA
= 0
B
M
= ) (BA R Fd M
B B
4 ) 12 )( 5 ( 0
B
R =
4
60
) 4 (
) 12 )( 5 (
= =
lb
R
B
lb R
B
15 =
Ejemplo: Diagrama de Cuerpo Libre (D.C.L.)
Peso despreciable
F F
R
Ax
A B R
Ay
R
By
Peso no despreciable
M M
G
Contacto liso
A
F F B
x
N
W
B
B
y
Ejemplo: Una viga delgada uniforme de masa m tiene su centro de gravedad a la mitad de su
longitud, la esquina sobre la que descansa es un borde agudo por consiguiente la reaccin N es
normal a la viga, la pared vertical izquierda es lisa. Cul es el valor del ngulo en equilibrio?
L / 2
N
u mg L / 2
mg
N
a
R
a
De
= 0
0
M + 0 cos
2
1
cos
= |
.
|
\
|
|
.
|
\
|
u
u
l mg
a
N
= 0 Fy 0 cos = mg N u
u cos
mg
N =
Sustituyendo en la primera ecuacin |
.
|
\
|
= |
.
|
\
|
|
.
|
\
|
u
u u
cos
2
1
cos cos
l mg
a mg
u
u
cos
2 cos
2
l a
=
l
a 2
cos
3
= u
3
2
l
a
= u
Ejemplo:
Una viga en voladizo de 3.8 m de largo y de 10 kg/m de masa soporta una
carga conectada de 1000 N en su extremo libre. El otro extremo de la viga est empotrado a una
pared de 0.8 m de espesor. Cules sern las reacciones de la viga en A y B?
1000 N
A B
3m 0.8 m
1000 N R
B
R
A
1.9m 1.1m 0.8m
= 0
B
M
Ejemplo:
A B
20 120 40
90
q
tot
R
Ax
R
Ay
R
By
lb
in
lb
inx q
tot
1800 10 180 = =
0 =
Fx 0 =
AX
R
= 0
A
M +
0 120 70 1800 =
BY
R x
lb R
BY
1050 =
= 0
B
M
0 50 1800 120 = x R
AY
lb R
AY
750 =
Ejemplo:
P=150 kg/m
1.8 m
3.0 m
P=135 kg
R
Ax
R
Ay
R
By
1.2 m 1.8 m
kg
x
P
tot
135
2
150 8 . 1
= =
= 0
x
F 0 =
AX
R
= 0
A
M + 0 3 2 . 1 135 =
By
xR x kg R
By
54 =
By
R
= 0
B
M + 0 8 . 1 135 3 = + x x R
Ay
kg R
Ay
81 =
Ay
R
Ejemplo: (texto pag. 42)
170 kg/m
150 kg
1 m 1 m 0.5 m 0.5 m
85 kg 170 kg 150 kg
R
1X
R
1y
R
2y
2/3 m
1.5 m
2.5 m 0.5 m
0 =
Fx 0
1
=
x
R
= 0
1
M +
0 3 150 5 . 2 170 5 . 1 85
3
2
2
= + + x x R x x
y
67 . 304
5 . 2
67 . 761
2
= =
y
R
= 0
2
M +
0 150 5 . 0 1 170 85 83 . 1 5 . 2
1
= + x x x x R
y
kg R
y
33 . 100
1
=
1000kg 750kg 1250kg
A B
1m 1m 1.5m 2m
1000 750 1250
1750 1250
= 0
A
M +
5 . 5
) 5 . 3 ( 1250 ) 2 ( 750 ) 1 ( 1000 + +
=
B
R , kg R
B
1250 =
= 0
B
M
5 . 5
) 2 ( 1250 ) 5 . 3 ( 750 ) 5 . 4 ( 1000 + +
=
A
R , kg R
A
1750 =
x
0 =
Fy 0 1750 = +V 1750 = V
V M
0 =
I
M + 0 1750 = X M
I
X M
I
1750 = 1 0 s s X
1750
1000
= 0 Fy 0 1000 1750 = + V 750 = V
V M
= 0
II
M 0 ) ( 1750 ) 1 ( 1000 = + X X M
II
2 0 < < X
1750 1000 750 + = X M
II
1000 750
= 0 Fy 0 750 1000 1750 = + V 0 = V
V M
= 0
III
M 0 ) 2 ( 750 ) 1 ( 1000 1750 = + + X X X M
1750 ) 2 ( 750 ) 1 ( 1000 1750 = X X X M
III
2500 =
III
M 5 . 3 2 < < X
1000 750 1250
V M
= 0 Fy 0 1250 750 1000 1750 = + V
1750 1250 + = V
= 0
IV
M 0 ) 5 . 3 ( 1250 ) 2 ( 750 ) 1 ( 1000 ) ( 1750 = + + + X X X X M
4375 1250 1500 750 1000 1000 1750 + + + = X X X X M
X M 1250 6875 =
M V
= 0 Fy 0 1250 = V 1250 + = V
1250
= 0
IV
M 0 ) 5 . 5 ( 1250 = + X M
X X M 1250 6875 ) 5 . 5 ( 1250 = =
X M 1250 6875 =
2500
1750
FORMA RAPIDA
30kg 40kg
10mt 10mt 30mt
A B C
30 40
R
1
=48 kg R
2
=22 kg
48kg
V 18kg
A B C
-22kg
M
A
=480kg*cm M
B
=660kg*cm
1000kg 750kg 1250kg
A B
1m 1m 1.5m 2m
1750 1250
Recorriendo la viga de izquierda a derecha, el cortante esta dado por la suma algebraica de las
fuerzas situadas a la izquierda del corte.
kg V 1750 = mts X 1 0 < < La R
1
provoca cortante positiva
750 1000 1750 = = V mts X 2 0 < < La fuerza de 1000 produce cortante negativa
0 750 1000 1750 = = V mts X 5 . 3 2 < <
1250 1250 750 1000 1750 = = V mts X 5 . 5 5 . 3 < <
Ejemplo: Dibujar los diagramas de fuerza cortante y momento flector correspondiente a la viga
mostrado y determinar el valor mximo del momento flector indicando el lugar donde se
encuentra.
200kg 100kg
1.2m 0.9m 0.9m
R
1
R
2
200 100
A B C
42.9 257.1
Calculo de reacciones:
= 0
1 R
M kg R 1 . 257
2
=
0 =
Fy kg R 9 . 42
1
=
V M
x
42.9
De 0 =
Fy kg V 9 . 42 =
= 0
A
M X M 9 . 42 =
Estos valores son validos para: 0 = X y 2 . 1 = X , 2 . 1 0 s s X
V M
42.9 x
De 0 =
Fy 0 9 . 42 200 = + V , kg V 1 . 157 =
= 0
A
M 0 9 . 42 ) 2 . 1 ( 200 = + X X M , X M 1 . 157 240 =
100kg
M V
De 0 =
Fy 100 = V
= 0
A
M 0 ) 3 ( 100 = + X M , ) 3 ( 100 X M =
157.1
-42.9 Mmax
-100
51.5 m kg M * 90 =
En X=2.1
(+)
(-)
-90
(-)
(+)
(-)
Ejemplo
225kg A
2m
225
A
R
1x
R
1y
Reacciones
0
1
=
x
R
= 0 Fy 0 225
1
= +
y
R , 225
1
=
y
R
225
V M
P
= 0 Fy kg V 225 = , ya que es igual a la suma de fuerzas externas.
Recordando: Fuerzas dirigidas hacia abajo producen momentos negativos,
=
A
M
0
P FUERZA POR UNIDAD DE LONGITUD
L P W
O TOT
=
L
L/2 L P W
O
=
Por inspeccin:
2
L P
R R
O
B A
= =
R
A
R
B
x
x/2 P
0
x
V M
2
0
L P
= 0 Fy 0
2
0
0
= + X P
L P
V , X P
L P
V
0
0
2
+ = Para cuando
2
L
X = , 0 = V
= 0 M 0
2 2
0
0
= |
.
|
\
|
+ X
L P X
X P M , X
L P X P
M
2 2
0
2
0
+ =
2
0
L P
V
2
0
L P
8
2
0
L P
2 2 2
2
0
2
0
L L P
L
P
M |
.
|
\
|
+
|
.
|
\
|
=
4 8
2
0
2
0
L P L P
M + =
8
2
0
L P
M =
EJEMPLO
lg
10
0
pu
lb
q =
A B
= 0
A
M +
20 120 40 0 ) 120 ( ) 70 ( 1800 = +
B
R
lb R
B
1050
120
) 70 ( 1800
= =
90 1800lb
70 50
= 0
B
M
0 ) 120 ( ) 50 ( 1800 = +
A
R
R
A
R
B
lb R
A
750
120
) 50 ( 1800
= =
x
x q
0
V M
= 0 Fy 0
0
= X q V , X X q V 10
0
= =
= 0 M 0
2
) (
0
= |
.
|
\
|
+
X
X q M ,
2
10
2
2 2
0
X X q
M = = , Donde 20 0 < s x
x q
0
V M
750
= 0 Fy 0 750
0
= + X q V , 750 10 750
0
= = X X q V
= 0 M 0 ) 20 ( 750
2
0
= |
.
|
\
|
+ X
X
X q M , ) 20 ( 750
2
10
2
+ = X
X
M
Donde 140 20 < < X
x P
0
= 0 Fy 0
0
= X P V , X P V
0
=
= 0 M
M V
VIGA SIMPLEMENTE APOYADA
2000 lb 100 lb/plg
5 6 14
R
1
R
2
= 0
1
M lb R 410
2
=
= 0
2
M lb R 2990
1
=
990
V -410
-2000
+840
M
-4060
-10000
CRITERIO DE SIGNOS
M +
M -
Cortante Positivo Cortante Negativo
Una fuerza que tiende a cortar la parte izquierda de la viga respecto a la parte derecha se dice
que produce un cortante positivo.
- Las cargas concentradas provocan un cambio brusco en los diagramas de fuerza
cortante.
- Los momentos concentrados provocan cambio brusco en los diagramas de Momento
Flector.
- Los momentos concentrados no dependen de x .
- Los valores de las reas son ordenadas en los diagramas.
- Para obtener el punto en donde el o los valores de cortante y momento son cero, se vala
la ecuacin correspondiente a la seccin que se analiza en V=0 o M=0 segn se desee.
- Reacurdese que en el punto donde V=0, M es un mximo.
P
0
R
1
R
2
x
R
1
-R
2
0
2
1
2P
R
M =
x P R V
0 1
= ,
0
1
P
R
x = En este punto V=0 y M es mximo.
|
.
|
\
|
=
2
0 1
x
x P x R M Brazo de palanca donde se aplica.
Fuerza concentrada de la seccin que se analiza.
P=1200 kg/m
L=3m
x
Por tringulos semejantes
x
p
L
P
= , |
.
|
\
|
=
L
x
P p Valor de la fuerza en la seccin del corte
Fuerza Promedio (semisuma de fuerza mayor y menor)
Fuerza Prom.: |
.
|
\
|
+
L
px
O
2
1
Fuerza Total: x
L
px
|
.
|
\
|
2
1
=
L
px
2
2
1
L
px
R V
2
2
1
=
Brazo del Momento
|
.
|
\
|
|
|
.
|
\
|
=
3 2
1
2
x
L
px
Rx M
L
px
Rx M
3 2
1
3
=
600kg
1200kg
690 kg/m
Ejemplo
P
0
B
A
P
0
L/2 L/2
4
0
L P
R
By
R
AX
R
Ay
L/6 5/6 L
4
0
L P
L/6
Calculo de reacciones
= 0 Fy 0
6
1
4 4
0
0 0
= + L P
L P L P
R
A
, L P R
A 0
6
1
=
= 0
A
M +
0
6
5
4 6 4
0 0
= + |
.
|
\
|
|
.
|
\
|
L R L
L P L L P
B
0
24
5
24
2
0
2
0
= + L R L P
L P
B
2
0
24
4
L P L R
B
= L P R
B 0
6
1
=
P
0
L/2 L/2
L
2
0
L P
Rx
M Ry
= 0 M + 0
4
3
2
0
= |
.
|
\
|
L
L P
M ,
2
0
8
3
L P M =
= 0 Fx 0 = Rx
= 0 Fy 0
2
0
=
L P
Ry ,
2
0
L P
Ry =
x
x/2 P
0
x
M V
= 0 Fy 0
0
= + x P V , x P V
0
=
2
0
L
x < <
= 0 M 0
2
2
0
= +
x P
M ,
2
2
0
x P
M =
L-x
V M
Ry
2
0
8
3
L P M =
= 0 Fy 0
2
0
= +
L P
V ,
2
0
L P
V =
= 0 M 0 ) (
2 8
3
0 2
0
= + x L
L P
L P M ,
2 2 8
3
0
2
0 2
0
Lx P L P
L P M + = L x < <
2
1
V
2
0
L P
M
4
2
0
L P
2
0
8
3
L P
1 m 1 m 0.5m 0.5m
170 150
85
100 305
x
2/3 x
2
2 2
0
85
) 1 ( 2
170
2
x
x
L
x P
= =
V M
100
= 0 Fy 0 100 85
2
= + x V 100 85
2
= x V
= 0 M 0 100
3
85
2
= |
.
|
\
|
+ x
x
x M
3
3
33 . 28 100
3
85
100 x x
x
x M = = , 1 0 < < x
) 1 ( 170 x
2
1 x
85
V M
100
= 0 Fy 0 100 ) 1 ( 170 85 = + x V 170 170 85 100 + + = x V 185 170 = x V
= 0 M 0 100
3
1
1 85
2
1
) 1 ( 170 = |
.
|
\
|
+ + |
.
|
\
|
+ x x
x
x M
( )
0 100
3
2
85
2
1
170
2
=
|
.
|
\
|
+
+ x x
x
M
( ) 0 100
3
170
85 1 2 85
2
= + + + x x x x M
0 100 67 . 56 85 85 170 85
2
= + + + x x x x M
0 33 . 28 185 85
2
= + + x x M
33 . 28 185 85
2
+ = x x M , 2 1 < < x
150
M V
305
= 0 Fy 0 305 150 = + V 155 = V
= 0 M 0 ) 5 . 0 3 ( 305 ) 3 ( 150 = + x x M
0 ) 5 . 2 ( 305 150 450 = + x x M
0 305 5 . 762 150 450 = + + x x M
0 5 . 312 155 = + x M
x M 155 5 . 312 = , 5 . 2 2 < < x
M V
= 0 Fy 150 = V
= 0 M ) 3 ( 150 x M = , 3 5 . 2 < < x
155
V
2
-100
150
72.2
-75
Problema 2.26
y
A b
z B
C a
F
Se analiza por partes.
1
0
Se traslada la fuerza al punto B: se coloca la fuerza F y un momento concentrado T = F a,
ya que es el que se estaba produciendo (es de torsin).
Se analiza la barra por partes.
T = Fa
x
T A
M = F
L
L
V V=F
M
M = -F
L
+ F
X
-F
L
T
Fa
= 0 Fx
= 0 Rx
= 0
A
M 0 =
L
F M
L
F M = Momento Concentrado
Para la segunda parte BC se considera B empotrado.
B
C
M = Fa
R = F F
F F V = F
-Fa
Ejemplo: Una viga en voladizo de 3.8m de largo y 10 kg/m de masa soporta una carga
concentrada de 1000 N en su extremo libre. El otro extremo de la viga esta empotrado en una
pared de 0.8m de espesor. Cules sern las reacciones de la viga en los puntos A y B?
1000 N
B
A
3 m 0.8 m
1000 N
R
B
1.90 1.10 0.80
R
A
(3.8x10x9.81)
372.4 N
= 0
B
M 0 8 . 0 9 . 1 4 . 372 8 . 3 1000 = + x R x x
A
N R
A
5630 =
= 0
A
M 0 8 . 0 1 . 1 4 . 372 3 1000 = + x R x x
B
N R
B
4260 =
Ejemplo.
Una barra de 20 m de longitud soporta una carga de 1200 Kg como puede
verse en la figura. El cable BC es horizontal y de 10 m de longitud. Hallar las tensiones
ejercidas en el cable y la barra.
B
10 m F
1
C
F
2
W
20 m 1200 Kg
0
A
Por el teorema de Pitgoras
m AB 3 . 17 ) 10 ( ) 20 (
2 2
= + =
866 . 0
20
3 . 17
cos = = 0
N x mg W 11760 81 . 9 1200 = = =
= 0
A
M + 0 10
1
= Wx AB x F
0 10 11760 3 . 17
1
= x x F
N F 6800
3 . 17
11760
1
= =
= 0 Fy 0 cos 11760
2
= + 0 F N F 13600
866 . 0
11760
2
= =
Ejemplo
Calculo de Reacciones
La barra AB pesa 10 lb por pie de longitud y est sostenida por un cable AC y un pasador en B.
Determinar la reaccin en B y la traccin en el cable.
Nota: Cuando actan solo 3 fuerzas sobre un cuerpo en equilibrio deben ser concurrentes.
A 30
0
B
12
d.c.l.
D
T
R
120 lb
30
0
120lb R
T
30
0
De la figura: 120 60 cos 60 cos = +T R , como T = R
120 60 cos 2 = T
0
60 cos 2
120
= T ; lb R T 120 = =
Nota: R debe pasar por el punto D que es la interseccin de T con el peso W.
C
Ejemplo
Determine el valor de las reacciones en los apoyos.
125N 200N 340N 180N
7m 7m 5m
4m 17m
Peso despreciable
Ejemplo
10 m 1200kg 2000kg
4m 8m 6m 5m
100 kg/m
RELACIONES ENTRE CARGA, FUERZA CORTANTE Y MOMENTO FLECTOR
Cuando existen varias cargas concentradas o distribuidas en una viga, la determinacin de los
correspondientes diagramas se complica, si se realiza el anlisis por medio del mtodo de
secciones, sobre todo el de momento flector; sin embargo el trazo de este ltimo se simplifica si
se emplean ciertas relaciones entre la carga, la fuerza y el momento.
Consideremos una viga AB sometida a una carga W como se ilustra en la cual realizaremos dos
cortes en los puntos C y C, para posteriormente separar dicha seccin y trazar el
correspondiente diagrama de cuerpo libre indicando todas las fuerzas y momentos que actan.
w
A B
C C` D
x x A
Para determinar la relacin entre carga y fuerza cortante aplicamos la ecuacin de equilibrio
= 0 Fy , obtenindose:
0 = A A + V x P V V , quedando x P V A = A .
Dividiendo entre x A y haciendo que este tienda a cero podemos escribir P
x
V
=
o
o
..(1)
x wA
x A
2
1
w
M M M A +
V C C` V V A +
x A
Procedemos de manera similar para obtener la expresin que relacione al momento flector conla
fuerza cortante
= 0 Mc ; de la figura se puede observar que:
0
2
= |
.
|
\
| A
A + A + + A
x
x P M M M x V , eliminando los trminos similares se obtiene
( )
0
2
2
=
A
+ A + A
x
P M x V , en donde el tercer trmino es despreciable, quedando
0 = A + A M x V , dividiendo entre x A y haciendo que este tienda a cero podemos escribir:
V
x
M
=
o
o
(2)
De la ecuacin (1) se puede integrar obtenindose:
}
+ =
x
C x P V
0
1
o el valor de la constante
C
1
es el de la reaccin. Anlogamente la ecuacin (2) queda:
}
+ =
x
C x V M
0
2
o , de donde
la constante se vala con condiciones frontera.
Ejemplo
A 10 kg/m 10 kg
B
1m 1m 1m
10 kg 10 kg
R
A
R
B
10 x
35/3 V M
10 kg
35/3 V M
10 kg
10 kg
35/3 V M
0
3
35
10 10 = + V
3
25
20
3
35
= + = V
3
25
= V
0
3
35
) 5 . 0 ( 10 ) 2 ( 10 = + + x x x M 5 10 20 10
3
35
+ + = x x x M
25 20
3
35
+ = x x M
25
3
25
+ = x M
A 10 kg/m 10 kg
B
1m 1m 1m
10 kg 10 kg
R
A
R
B
Calculamos las reacciones con las ecuaciones de equilibrio
= 0
A
M ; 0 20 5 = +
B
R kg R
B
3
25
=
= 0
B
M ; 0 3 ) 5 . 2 ( 10 10 = +
A
R kg R
A
3
35
=
10 x
35/3 V M
= 0
V
F , 0 10
3
35
= + x V
3
35
10 = x V
= 0 M , 0
3
35
2
10 = |
.
|
\
|
|
.
|
\
|
+ x
x
x M x x M 5
3
35
|
.
|
\
|
=
10 kg
35/3 V M
Integrando la ecuacin de V y cambiando signo tenemos
C x
x
M + |
.
|
\
|
+
|
|
.
|
\
|
=
3
35
2
10
2
2
5
3
35
x x M |
.
|
\
|
=
Como M = 0 cuando x = 0, entonces C = 0
= 0 Fy , 0 10
3
35
= + V
3
5
= V
= 0 M , 0
3
35
) 5 . 0 ( 10 = + + x x M 5 10
3
35
+ |
.
|
\
|
= x x M 5
3
5
+ |
.
|
\
|
= x M
se cambia el signo
Integrando la ecuacin de V se tiene C x M + |
.
|
\
|
+ =
3
5
, en donde la condicin frontera es el valor
anterior conocido o sea cuando x = 1, en la ecuacin anterior es decir
3
20
= M , entonces:
C + = ) 1 (
3
5
3
20
; Entonces, 5
3
5
3
20
= = C
EJEMPLO
600 kg/m
P
R
P
T
150 kg/m
3 m
R
A
R
B
kg P
R
450 ) 3 ( 150 = =
kg P
T
675
2
1
) 150 600 ( 3 = =
= 0
A
M + 0 ) 3 ( ) 2 ( ) 5 . 1 ( = +
B T R
R P P
3
1350 675 +
=
B
R , 675 =
B
R
= 0
B
M + 0 ) 3 ( ) 5 . 1 ( ) 1 ( = +
A R T
R P P
3
675 675
=
B
R , 475 =
A
R
P
R
` P
T
`
P
0
M 3 0 s s x
R
A
V
Tringulos Semejantes
x
P
0
3
450
=
x x P 150 ) (
3
450
0
= =
2 0
2
150
2
` x
xP
P
T
= =
0 ` ` = +
T R A
P P V R
V x x = + +
2
75 150 450
} }
+ = = dx x x Vdx M ) 450 150 75 (
2
1
2 3
450 75
3
75
C x x x M + + = , pero C
1
=0
x x x M 450 75
3
75
2 3
+ =
675
V x=1.64
-56.25
x=1.64
-450 426
M
x=1.5
-421.875
CONCEPTO DE ESFUERZOS
Como se menciono al inicio del curso, nuestro objetivo es adquirir los conocimientos bsicos
que nos permitan en cursos posteriores analizar o disear elementos de maquinas sometidos a la
accin de cargas.
El anlisis de la carga que acta en un material por si mismo no proporciona informacin
respecto a que pueda ser soportada por la estructura o elemento sin peligro.
El que el elemento se rompa o no, depende no solo de la carga aplicada, sino tambin de la
seccin transversal as como del material del que esta construido.
A la fuerza por unidad de rea, o intensidad de las fuerzas distribuidas sobre la seccin, se le
conoce como esfuerzo en dicha seccin y se denota por la letra , el cual puede ser de tensin
cuando el elemento se somete a un estiramiento o de compresin cuando se aplasta o comprime.
Matemticamente se representa por la ecuacin:
A
P
= o
Las unidades en que se expresan los esfuerzos, en el Sistema Internacional (SI), son Newton (N)
para la carga P y m
2
para el rea A, por tanto, el esfuerzo se expresa en N/m
2
o Pascal, en la
practica se utilizan mltiplos de esta unidad.
2
3 3
10 10 1
m
N
Pa KPa = =
2
6 6
10 10 1
m
N
Pa MPa = =
2
9 9
10 10 1
m
N
Pa GPa = =
Para el Sistema Mtrico las unidades son
2
cm
Kg
o
2
m
Ton
.
Mientras que para el Sistema Ingles las unidades son
2
lg pu
lb
o
2
lg pu
Klb
.
n F A n : normal al plano
F A : Resultante de todas las
fuerzas que actan
en F A
P
A A Esfuerzo = T
A
F
=
A
A
0
lim
n
F A
o T T : f (posicin de P y del plano)
P o : esfuerzo normal
t t : esfuerzo cortante
A A
Haciendo pasar un plano paralelo a A A de tal forma que n coincida con un eje cartesiano, se
puede descomponer T en sus componentes rectangulares quedando de la forma siguiente:
y
yy
o esfuerzo normal
n plano y en la
yy
o direccin y
yx
t esfuerzo cortante en
T el plano y en la
direccin x
P
t
A A
yx
t
yz
t esfuerzo cortante en
el plano y en la
yz
t direccin z
CARGA AXIAL: ESFUERZO NORMAL
Como ya hemos mencionado, una carga axial es aquella que se aplica a lo largo del eje
longitudinal del elemento, por otro lado de la formula de esfuerzo:
A
P
= o
Recordemos que P es la resultante de las fuerzas distribuidas en el rea de la seccin transversal
A, dicha expresin representa al valor promedio del esfuerzo en la seccin y no el esfuerzo en
un punto; para poder determinar el valor de o en un punto particular, consideremos un
elemento A A por lo que dividiendo F A entre A A obtendremos el valor promedio del esfuerzo
en A A y si este ultimo termino tiende a cero se tendr:
o =
A
A
0
lim
A
F
En general se puede afirmar que el valor del esfuerzo en un punto es diferente del valor del
esfuerzo promedio es decir o vara a travs de la seccin, por lo que de la ecuacin anterior se
puede concluir que:
} }
=
A
dA dF o
Pero las condiciones de equilibrio requieren que esta magnitud sea igual a la magnitud de las
cargas concentradas, es decir:
} }
= =
A
dA dF P o
La distribucin real en una seccin dada es estticamente indeterminada.
En la practica se supone que la distribucin de los esfuerzos axiales es uniforma, excepto en la
vecindad de los punto s de aplicacin. As, una distribucin uniforme de esfuerzos es posible
nicamente si la lnea de accin de las cargas concentradas pasa por el centroide de la seccin
analizada.
F A
A A
A
F
A A
A
A
=
0
lim
o
P
o
P
o
o
P P P P
(a) (b) (c) (d)
o P
} }
=
A
dA dF o
} }
= =
A
dA dF P o C
=
Q
P
P
ESFUERZOS CORTANTES
Cuando se aplican cargas transversales P y P a un elemento AB dando lugar a que se corte en
un punto C, al analizar una porcin se concluye que existen fuerzas internas llamadas fuerzas
cortantes, cuya resultante debe ser igual a P; si dividimos dicha resultante entre el rea de la
seccin transversal obtenemos el Esfuerzo Cortante que se expresa como:
A
P
= t o bien
Ac
F
= t
A diferencia del caso anterior la distribucin del esfuerzo cortante no es uniforme, teniendo un
valor nulo de la superficie y un valor mximo que puede ser mayor que el promedio.
Los esfuerzos cortantes se presentan por lo general en pernos, pasadores y remaches utilizados
para conectar varios miembros estructurales o componentes de mquinas.
Los remaches como puede observarse en las figuras, pueden estar sometidos a corte simple en
cuyo caso se aplica la ecuacin anterior o corte doble y para determinar el valor del esfuerzo
cortante se aplicara la expresin siguiente:
Ac
F
2
= t
A
F
A
P
ave
2
= = t
td
P
A
P
b
= = o
A
F
A
P
= = t
ESFUERZOS DE APOYO O APLASTAMIENTO
Tanto los pernos como los pasadores y remaches, crean esfuerzos en los elementos que
conectan, a lo largo de la superficie e apoyo o de contacto.
El remache ejerce una fuerza P sobre la placa que es opuesta a la fuerza F ejercida por la placa.
La fuerza P representa la resultante de las fuerzas elementales aplicadas y distribuidas en el
interior del medio cilindro de dimetro d y de longitud igual al espesor de la placa t.
Puesto que el anlisis de la distribucin de las fuerzas y de los esfuerzos correspondientes es
muy complejo, en la prctica se usa un valor promedio nominal
A
o del esfuerzo, llamado
esfuerzo de aplastamiento o de apoyo, el cual se obtiene dividiendo la carga P entre el rea del
rectngulo que representa la proyeccin del remache en la seccin de la placa mediante la
expresin:
A
A
P
= o o bien
td
P
= o
ESFUERZOS EN UN PLANO OBLICUO
Las fuerzas axiales as como las transversales, provocan esfuerzos tanto axiales como cortantes
cuando estn actan en planos que no son perpendiculares al eje del elemento.
DEFORMACION
Si un cuerpo dado esta sujeto a un sistema de fuerzas, puntos individuales del cuerpo podrn en
general moverse.
El movimiento de un punto arbitrario es una cantidad vectorial llamada un desplazamiento.
El movimiento de un cuerpo puede considerarse como la suma de dos partes,
1.- Una rotacin y/o traslacin del cuerpo como un todo.
2.- Movimiento de los puntos del cuerpo relativo con otro.
El primer movimiento es conocido como movimiento del cuerpo rgido.
El movimiento relativo entre puntos del mismo cuerpo se conoce como DEFORMACION y esta
es una propiedad de los cuerpos reales.
En materiales empleados en ingeniera los desplazamientos pueden ser grandes o pequeos,
pero las deformaciones siempre son pequeas excepto para el hule o estructuras especializadas
como vigas.
La deformacin es una cantidad geomtrica que depende del movimiento relativo de dos o ms
puntos dentro del cuerpo.
Al alargamiento por unidad de longitud se le conoce como deformacin lineal,
0
0
0 0
0
l
l l
l
l
l
dl
f
l
l
=
A
= =
}
c
(
ft
ft
cm
cm
m
m
L
L
:
Adems de la deformacin lineal anterior puede haber deformacin en otras dos direcciones, as
como tambin pueden presentarse deformaciones angulares.
Sean u, v, w las tres componentes de desplazamiento en las direcciones x, y, z respectivamente.
u es un desplazamiento
u A es un alargamiento.
dx
du
x
u
x
x
=
A
A
A
=
0
lim
c
Si el cuerpo se deforma en ejes perpendiculares x, y por ejemplo
x
u
x xx
o
o
c c = =
y
v
y yy
o
o
c c = =
z
w
z zz
o
o
c c = =
Anlogamente se utilizan dos subndices, uno indica la direccin del elemento lineal y el otro la
direccin del desplazamiento.
Pueden presentarse adems deformacin angular.
Puesto que v es desplazamiento en la direccin y, a medida que se avanza en la direccin x,
x
v
o
o
es la pendiente del lado inicialmente horizontal.
De igual manera el lado vertical se inclinara un ngulo
y
u
o
o
el ngulo inicialmente recto CDE se reduce en la cantidad
x
v
o
o
+
y
u
o
o
la definicin de DEFORMACION ANGULAR relacionada conlas coordenadas X y Y es:
y
u
x
v
yz xy
o
o
o
o
+ = =
Consideracin: las tangentes de ngulos pequeos son iguales a los propios ngulos medidos en
radianes.
De forma similar se tiene:
z
u
x
w
zx xz
o
o
o
o
+ = =
z
v
y
w
zy yz
o
o
o
o
+ = =
Se requiere de 3 ecuaciones independientes que relacionen a
yz xz xy zz yy xx
c c c , , , , , .
Para el caso bidimensional se necesita una sola ecuacin.
Estas ecuaciones se conocen como ecuaciones de compatibilidad. (Mayor Informacin en libros
de elasticidad lineal)
2 2
yx xy
yx xy
c c = = =
2 2
zy yz
zy yz
c c = = =
2 2
zx xz
xz zx
c c = = =
|
|
|
|
.
|
\
|
zz zy zx
yz yy yx
xz xy xx
c c c
c c c
c c c
Esfuerzo Deformacin
|
|
|
|
.
|
\
|
zz zy zx
yz yy yx
xz xy xx
o t t
t o t
t t o
LEYES LINEALES DE ESFUERZO Y DEFORMACION Y ENERGIA DE
DEFORMACION
Como se sealo hay en general seis componentes de esfuerzo y tambin seis componentes de
deformacin. La relacin lineal entre el esfuerzo y la deformacin se conoce como Ley de
Hooke.
Al formular la Ley general de Hooke, se utiliza el principio de superposicin el cual expresa el
esfuerzo o deformacin resultante en un sistema sometido a varias fuerzas, es la suma
algebraica de sus efectos cuando se aplican individual o separadamente.
Para la mayor parte de las estructuras de ingeniera las deformaciones son pequeas lo que
permite la aplicacin del principio de superposicin.
Relacionando cada componente de deformacin con cada componente de esfuerzo las relaciones
lineales entre esfuerzo y deformacin se convierten en:
zx yz xy zz yy xx x xx
A A A A A A t t t t t t c c
16 15 14 13 12 11
+ + + + + = =
zx yz xy zz yy xx y yy
A A A A A A t t t t t t c c
26 25 24 23 22 21
+ + + + + = =
zx yz xy zz yy xx z zz
A A A A A A t t t t t t c c
36 35 34 33 32 31
+ + + + + = =
zx yz xy zz yy xx
xy
xy
A A A A A A t t t t t t
c
46 45 44 43 42 41
2
+ + + + + = =
zx yz xy zz yy xx
yz
xz
A A A A A A t t t t t t
c
56 55 54 53 52 51
2
+ + + + + = =
zx yz xy zz yy xx
zx
zx
A A A A A A t t t t t t
c
66 65 64 63 62 61
2
+ + + + + = =
En estas ecuaciones aparecen 36 constantes posibles:
66 12 11
,... , A A A
Mediante consideraciones de energa se puede demostrar que el nmero de constantes es
independiente es 21 ya que stas son simtricas respecto a uno y otro lado de la diagonal
principal es decir,
21 12
A A = . Adicionalmente se supone que el material es homogneo.
La Ley de Hooke en la forma ms general es aplicable a materiales anisotrpicos homogneos
tales como cristales simples (poseen propiedades mecnicas diferentes segn la direccin). En
materiales reales se carece de las caractersticas antes mencionadas por lo que no es aplicable
dicha ecuacin.
Para materiales como la madera (material ortotrpico) cuyas propiedades en las direcciones
longitudinal, radial y transversal son diferentes, se puede demostrar que slo existen nueve
constantes independientes; la ecuacin en estas condiciones es aplicable para el estudio de por
ejemplo: plstico reforzado con fibra de vidrio, relleno para construccin, materiales laminados,
etc., cuyo estudio queda fuera del curso.
LEY DE HOOKE PARA MATERIALES ISOTROPICOS HOMOGENEOS
Estos materiales tienen las mismas propiedades en todas direcciones, por lo que se puede
demostrar que tal condicin , , ,
66 55 44 23 13 12 33 22 11
A A A A A A A A A = = = = = = adems tomando
las condiciones anteriores, , , ,
32 23 31 13 21 12
A A A A A A = = = todas las otras constantes
desaparecen.
Estas simplificaciones originan la Ley de Hooke generalizada, la cual, tomando en cuenta los
siguientes cambios
E
v
A
E
A = =
12 11
,
1
y
( )
.
2
1
44
G
A =
E E E
z
y
x
x
o
v
o
v
o
c =
E E E
z
y
x
Y
o
v
o
o
v c + =
E E E
z
y
x
z
o
o
v
o
v c + =
G
xy
xy
t
=
G
yz
yz
t
=
G
zx
zx
t
=
En estas ecuaciones la constante E se llama mdulo de elasticidad y es la pendiente de una recta
en un diagrama de esfuerzo-deformacin. La constante G se llama mdulo de elasticidad al
corte o mdulo de rigidez
) 1 ( 2 v +
=
E
G .
La constante v recibe el nombre de Poisson y es la razn del valor (con un signo) de la
deformacin lineal en direccin lateral a la deformacin lineal en direccin transversal es decir:
axial
lateral
n deformaci
n deformaci
x
z
x
y
= = =
c
c
c
c
v
DEFORMACION DE CUERPOS CARGADOS AXIALMENTE
L
P
1
A B P
4
P
2
P
3
x dx
P(x)
P(x)
xdx dx c + x
dx
du
c = du xdx = c
La deformacin total entre dos puntos dados de una barra es simplemente la suma se las
deformaciones elementales el desplazamiento de un punto de la barra esta dado por la
integral de los desplazamientos mas una constante de integracin. Tal constante C es para tener
en cuenta el desplazamiento dado en una de las fronteras.
Como
x
dx
du
c = ; dx du
x
c =
} }
+ = + =
x
x
x
C dx C du u
0
1
0
1
c
NOTA: Secciones perpendiculares inicialmente al eje de una barra, se mueven axialmente una
distancia u en forma paralela a si mismas.
Como
A
x P
x
) (
= o y adems E
x x
c o =
La ecuacin anterior se transforma en:
1
0
1
0
) (
) (
C dx
E x A
x P
C dx
E
u
x x
x
+ = + =
} }
o
AE
PL
u = ;
) ( ) (
) ( ) (
x E x A
x L x P
u =
Ejemplo 4.7 Popov, pag. 162
Considere la barra AB de seccin transversal constante A y de longitud L. Determine el
desplazamiento relativo de A con respecto a B cuando se aplica una fuerza P; es decir hallese el
alargamiento en el extremo libre producido por la aplicacin de una fuerza concentrada P. El
modulo de elasticidad del material es E.
B
x P(x)=P P
C C
L
dx
P
A A
P
Puede apreciarse que en cualquier punto de corte, tanto la fuerza P como el area A permanecen
constantes as como E
1
0
) (
) (
C dx
E x A
x P
u
x
+ =
}
=
1
0
1
C
AE
Px
C dx
AE
P
x
+ = +
}
Como para x=0, u(x)=0
0
1
= C
AE
Px
u =
En el extremo libre
AE
PL
L u A = ) ( .
El alargamiento en la barra es directamente proporcional a la carga aplicada y a la longitud e
inversamente proporcional a A y E.
ECUACIONES DE EQUILIBRIO
Considerando el cubo diferencial.
Haciendo 0 = E
x
F
0 ) ( ) ( ) ( = + + + + + + Fxdxdydz dxdy dz dxdz dy dydz dx
zx
z
zx
zx yx
y
yx
yx xx
x
xx
xx
t
o
ot
t t
o
ot
t o
o
oo
o
Dividiendo entre dv
0 = + + + Fx
z
zx
y
yx
x
xx
o
ot
o
ot
o
oo
Procediendo de manera similar en y y z se llega a:
0 = + + + Fy
z
zy
y
yy
x
xy
o
ot
o
oo
o
ot
0 = + + + Fz
z
zz
y
yz
x
xz
o
oo
o
ot
o
ot
4.5 Una placa de acero de 1 cm x 5 cm x 25 cm, esta sometida a esfuerzos uniformemente
distribuidos a lo largo de sus bordes.
a) Si Px=10 Ton y Py=20 Ton.
Cul ser el cambio en espesor debido a la aplicacin de estas fuerzas?
b) Cul deber ser la magnitud de Px para que esta sola fuerza produzca el mismo cambio
de espesor que en (a)?
Considere que E=2x10
6
kg/cm
2
y 25 . 0 = .
25 cm
Py=20 Ton
5 cm Px=10 Ton
? = Alz , sabemos que
2 2 2
l l A = c
0
Adems: ( )
E E
V
Z
Y X z
o
o o c + + =
2000
1 5
10000
= = =
x A
p
x
x
X
o
800
1 25
20000
= = =
x A
p
y
y
y
o
4
6
10 5 . 3 ) 800 2000 (
10 2
25 . 0
= + = x
x
z
c
4 4
2
10 5 . 3 ) 1 )( 10 5 . 3 (
= = A x x l
b).- Como ahora 0 =
y
o
x z
E
V
o c = , pero
x
x
x
A
P
= o
1 . 5 10 2
25 . 0
10 5 . 3
6
4 x
P
x
x =
25 . 0
5 10 2 10 5 . 3
6 4
x x x x
P
x
=
Ton P
x
14 = .
Un alambre de acero de 10 m de longitud que cuelga verticalmente, soporta una carga de 250
kg. Determinar el dimetro necesario despreciando el peso del alambre, si la tensin no debe
exceder de 1400 kg/cm
2
y el alargamiento debe ser menor de 5 mm. Supngase E=2x10
6
kg/cm
2
.
A
P
= o ;
4
250
1400
2
d t
=
cm
x
d 476 . 0
1400
4 250
= =
t
}
=
L
x E x A
dx x P
u
0
) ( ) (
) (
250 Kg.
AE
PL
u =
2
6 2
2
10 2
4
1000 250
5 . 0
cm
kg
x x cm
d
cm kgx
cm
t
=
6 2
10 2
4 1000 250
5 . 0
x x xd
x x
t
=
cm
x x x
x x
d 56 . 0
5 . 0 10 2
4 1000 250
6
= =
t
.
En mecnica la energa se define como la capacidad de realizar trabajo y este es igual al
producto de una fuerza y la distancia recorrida en la direccin de la misma.
F A = o
Las deformaciones son distancias recorridas.
El producto de estas dos cantidades es el trabajo interno realizado en un cuerpo por fuerzas
aplicadas exteriormente. El cual se almacena como energa de deformacin elstica.
2
0
x x
V
dv
du c o
= = , Densidad de Energa de deformacin.
}
=
v
x x
dV U
0
0
2
c o
.
Por ejemplo del libro, Pg. 141.
ENERGIA DE DEFORMACION ELASTICA PARA ESFUERZOS CORTANTES
y dy
xy
yx
t
y
dy
xy
t
xy
dy
x
z dz
dx x
A medida que el elemento se deforma, la fuerza sobre su cara superior alcanza un valor final
dxdz
xy
o .
El desplazamiento total de esta fuerza para una deformacin pequea del elemento es dy
xy
o .
Como el TRABAJO EXTERNO realizado en el elemento es igual a la energa elstica interna
recuperable.
dV dxdydz dy dxdz dU
xy xy xy xy xy xy corte
t t t
2
1
2
1
2
1
= = - =
Fuerza media dist. Recorrida.
xy xy
corte
dV
dU
t
2
1
= |
.
|
\
|
Anlogamente;
2
xz xz
corte
dV
dU t
= |
.
|
\
|
2
yz yz
corte
dV
dU
t
= |
.
|
\
|
ENERGIA DE DEFORMACION PARA ESTADOS DE ESFUERZO MULTIAXIALES
Las expresiones de energa de deformacin se deducen directamente por superposicin de las
energas de cada componente de esfuerzo. La densidad de energa de deformacin es:
yz yz xz xz xy xy z z y y x x
U
dv
du
t t t c o c o c o
2
1
2
1
2
1
2
1
2
1
2
1
0
+ + + + + = =
Sustituyendo en la ley de Hooke generalizada se llega a:
( ) ( ) ( )
2 2 2 2 2 2
0
2
1
2
1
zx yz xy x z z y y x z y x
G E
v
E
U t t t o o o o o o o o o + + + + + + + =
Energa de deformacin elstica por unidad de volumen para materiales isotrpicos.
4.12 Una barra cuadrada de acero de aleacin de 5 (cm) de lado y 75 (cm) de longitud es parte
de una mquina y debe resistir una carga de energa axial de 1000 kg*cm. Cul debe ser el
lmite de proporcionalidad del acero para que resista elsticamente con seguridad la carga de
energa con un factor de seguridad de 4?
Cul es el mdulo de resistencia de tal acero?
Sea E=2x10
6
kg/cm
2
.
yp
o
w
o
5 (cm)
75 (cm) 5 (cm)
U=1000 kg*cm.
? =
yp
o , sabemos que 4 = = =
permisible
ultimo
esfuerzo
esfuerzo
Fs
x
yp
o
o
Se tiene dv
E
U
}
=
2
2
o
debe ser permisible.
V
E
U
x
2
2
o
= ; ( )
2
2
|
|
.
|
\
|
=
x
yp
Fs
o
o
;
2
2
|
|
.
|
\
|
=
Fs
yp
x
o
o ,
E
V
U
yp
) 2 ( 4
2
2
o
= ;
6
2 2
10 2 2 16
) 75 ( ) 5 (
1000
x x x
yp
o
=
. 37 . 5842
) 75 )( 5 (
10 2 2 16 1000
2 2
6
|
.
|
\
|
= =
cm
kg x x x x
yp
o
Modulo de resiliencia:
E
M
yp
2
2
o
= ,
( )
( )
(
(
(
= =
3
2
2
2
6
2
/
/
53 . 8
10 2 2
) 37 . 5842 (
cm
cmkg
cm kg
cm kg
x x
M .
Resiliencia.- Es la energa potencial almacenada por un cuerpo deformado. La cantidad de
resiliencia es igual al trabajo requerido para deformar el cuerpo a partir de un esfuerzo cero
hasta un esfuerzo S donde S no debe exceder el lmite elstico.
Resiliencia = Trabajo de deformacin =
E
l
SAx
E
V
S
5
2
1
2
1
2
= , para esfuerzo normal.
= =
yp
S o Esfuerzo de fluencia.
Modulo de resiliencia M, | | | |
3 3
/ / cm kg cm o in lb in
E
M
yp
2
2
1
o
=
G
M
2
2
1 t
=
G
M
2
4
1 t
=
En tensin Corte Torsin slidos circulares
Ejemplo:
Resiliencia ltima
( )
M yp u R
M o o c 2
3
1
+ = , donde:
:
yp
o esfuerzo de fluencia
:
u
c deformacin total en la ruptura
:
M
o resistencia ultima en tensin.
Se toman los datos de los diagramas c o .
Para acero estructural;
( ) | |
|
.
|
\
|
~
(
= + =
3 3
982 950 , 13 60000 * 2 3500 *
100
27
*
3
1
cm
cmkg
in
inlb
M
R
EJEMPLO:
Una carga P = 40000 lb comprime un block de madera con seccin transversal con un rea
A=10 in
2
y longitud de 10 in; una variacin en la longitud in x 04 . 0 = A , es observada. Cul
ser el modulo de resiliencia?
P
A = 10in
2
10
E
M
2
2
1 o
=
100
4
04 . 0 = = Ax ;
250
1
1000
4
004 . 0
10
04 . 0
= = = =
A
=
l
x
x
c
2
4000
10
40000
in
lb
Area
Fza
= = = o
E c o = ;
c
o
= E , de donde
2
000 , 000 , 1 250 4000
250
1
4000
in
lb
x E = = =
( )
. 8
10000
4000
2
1
3
2
in
inlb
M = =
. 8
3
in
inlb
M =
DEFORMACION EN MIEMBROS CARGADOS AXIALMENTE
L L
0
P
x
o = = A
0
L L L
( )
0
, , , L P E A f = o
x
dx
du
c =
} }
= dx du
x
c
De la ley de Hooke
x
Ec o =
E
x
o
c =
}
=
x
x
dx
E
0
o
; Pero adems
A
P
= o .
Entonces,
}
=
x
dx
AE
P
0
Que finalmente se puede expresar como:
}
=
x
dx
x E x A
x P
0
) ( ) (
) (
,
AE
PL
= .
4.21 Una barra redonda de acero con una seccin trasversal de 3.13 cm
2
est fijada en posicin
vertical por su parte superior, y se le somete a tres fuerzas axiales como se indica en la figura.
Determine el alargamiento en su extremo libre originado por dichas fuerzas y trace los
diagramas de fuerza y deformacin axial. E=2.4x10
6
kg/cm
2
.
P o
90 10
4
60 6
30 2 8
8
= + + =
} } }
180
150
6
90
0
150
90
6 6
10 4 . 2 13 . 3
8000
10 4 . 2 13 . 3
6000
10 4 . 2 13 . 3
10000
x x
dx
x x
dx
x x
dx
19894 . 0 0319489 . 0 04792 . 0 11908 . 0 = + + =
19894 . 0 =
4.26 De una placa metlica de 2.5 cm de espesor se han de cortar dos tiras de manera que ambas
tengan un grosor constante de 2.5 cm. La tira A debe tener un ancho constante de 5 cm en toda
su longitud y la B tendr 7.5 cm de anchura en un extremo y 2.5 cm en el otro. Cada tira esta
fija en su parte superior como se indica. Determine la razn L
A
/L
B
necesaria para que ambas
barras se alarguen la misma cantidad.
NOTA: Como es un problema de deformacin total emplearemos la expresin:
}
=
L
x E x A
dx x P
0
) ( ) (
) (
5.0
7.5
2.5
2.5
2.5
P P
E
PL
X
PL
E A
PL
A A
A
A
A
5 . 12 ) 5 . 2 5 (
= = =
2.5 22.5 2.5
x
L
2.5
M M
a L-x
A
3
Por tringulos semejantes:
x L
M
L
=
5 . 2
;
L
x L
M
) ( 5 . 2
=
|
.
|
\
|
=
L
x
M 5 . 2 5 . 2
M a 2 5 . 2 + =
|
.
|
\
|
+ =
(
|
.
|
\
|
+ =
L
x
L
x
a 1 5 5 . 2 5 . 2 5 . 2 2 5 . 2
L
x
L
x
L
x
a Area
B
5 . 12 75 . 18 1 5 . 12 25 . 6 5 . 2 1 5 5 . 2 5 . 2 * = |
.
|
\
|
+ =
(
|
.
|
\
|
+ = =
} }
= =
L L
B
B
x L
Ldx
E
P
E A
Pdx
0 0
5 . 12 75 . 18
} }
=
L L
B
x L
dx
E
PL
x L
PLdx
0 0
5 . 12 75 . 18
5 . 12
5 . 12 5 . 12 75 . 18
( ) ( ) | | = I =
L
x L
E
PL
0
5 . 12 75 . 18 ln
5 . 12
( ) = = L L
E
PL
75 . 18 ln 25 . 6 ln
75 . 12
=
|
.
|
\
|
=
|
|
.
|
\
|
|
|
.
|
\
|
=
75 . 18
25 . 6
ln
75 . 12 75 . 18
25 . 6
ln
75 . 12 E
PL
L
L
E
PL
B
B
( ) 0986 . 1
75 . 12
=
E
PL
B
B
Como
B A
=
( ) 09 . 1
5 . 12 5 . 12 E
PL
E
PL
B A
=
10 . 1 09 . 1 ~ =
B
A
L
L
4.19 Una varilla redonda de acero inoxidable de 9 m de largo, utilizada en mecanismos de
control, debe transmitir una fuerza de tensin de 500 Kg sin alargarse mas de 0.5 cm o exceder a
una fuerza permisible de 1400 kg/cm
2
. Cul debe ser su dimetro?, considere que E=2x10
6
kg/cm
2
para tal material. De la respuesta redondeando al octavo de pulgada ms prximo.
P=500 Kg
9 m
5 . 0 = ,
4
2
d
Area
t
=
2
1400
cm
kg
w
= o
2
6
10 2
cm
kg
X E =
1400
*
4 * 500
2
= = =
d A
P
t
o
cm d 67 . 0
1400 *
4 * 500
= =
t
, ,
4
1
8
11 . 2
8
8
*
54 . 2
67 . 0
~ =
Empleando otro mtodo:
5 . 0
10 * 2 *
4 * 900 * 500
6 2
= = =
d AE
PL
t
76 . 0
5 . 0 * 10 * 2 *
4 * 900 * 500
6
= =
t
d
32 . 20
06 . 6
8
8
*
54 . 2
76 . 0
=
TORSION
Se establecern relaciones para ver el efecto de un momento o un par T el cual produce torsin
en un elemento.
Se limitara al estudio de elementos con seccin transversal circular maciza o hueca, ya que en la
prctica, los miembros que transmiten par de rotacin, tales como ejes de motores, tubos de
torsin, de equipo de potencia, etc, son de seccin circular maciza o hueca.
El efecto producido por momentos externos deber ser contrarrestado por un momento interno.
Para determinar dicho momento torsionante, en miembros estticamente determinados solo se
requiere de la ecuacin de la esttica 0 =
x
M estando el eje dirigido a lo largo del elemento.
int
M M
ext
=
Para secciones transversales constantes, el elemento torsionante mximo producir el mayor
esfuerzo en el material. En la investigacin de un miembro sometido a torsin, se investigan
varias secciones transversales para determinar el mximo momento torsionante; a la zona donde
esta localizado este, se le llama seccin crtica.
De cursos anteriores se sabe que:
1 C.V. = un trabajo de 75 kg m /s.
= (75)(100)(60) kg m /min.
De Dinmica se tiene:
Potencia = momento x ngulo de giro (en radianes) por unidad de tiempo.
P. ejemplo: Si un eje gira a N r.p.m., el ngulo descrito por unidad de tiempo es N t 2
| | min / rad , si adems dicho eje transmite un momento constante T, diremos entonces que el
trabajo realizado es NT t 2 | | min / cm .
Igualando esto a la potencia que se suministra en caballos mtricos,
C.V. (75)(100)(60) kg cm/min = NT t 2 kg cm/min.
( )
N
V C
T
. . 71600
= kg cm.
La expresin anterior se emplea para transformar la potencia que se suministra a un eje; en un
momento de torsin constante que acta a travs de l a medida que se aplica la potencia.
SUPOSICIONES BASICAS
Para establecer una relacin entre el momento torsionante interno y los esfuerzos que se
producen en miembros de seccin circular y tubos redondos.
1.- Homogeneidad del material
2.- Una seccin transversal plana perpendicular al eje de un miembro de seccin circular,
permanece plana despus de aplicarle un momento de torsin, es decir no hay alabeo o
distorsin, en los planos paralelos normales al eje de un miembro.
3.- la deformacin angular , vara linealmente desde su eje longitudinal.
O
3
O
2
O
1
B A x
C
B` A`
El plano AO
1
O
3
C pasa a A
O
1
O
3
C,
De igual forma el radio O
3
C es fijo,
O
2
B pasa a O
2
B
O
1
A pasa a O
1
A
.
Podemos concluir que el esfuerzo cortante es directamente proporcional a la deformacin
angular.
FORMULA DE TORSION
La deformacin vara linealmente desde el centro.
Los esfuerzos originados son constantes y actan en un plano paralelo a la seccin y normal al
eje de la barra.
El esfuerzo cortante mximo se presenta en los puntos ms alejados del centro; entonces
podemos establecer la variacin del esfuerzo como:
max
t
t |
.
|
\
|
=
C
,
ya que al variar el esfuerzo cortante con la distancia podemos escribir
C
max
t
t
= ,
la expresin anterior se visualiza en la figura mediante la propiedad de tringulos semejantes.
En todas las direcciones estn actuando los esfuerzos en elementos diferentes de rea.
Momento torsionante interno estar dado por:
max
o
}
A
C
dA = T
ESFUERZO AREA BRAZO DE MOMENTO
FUERZA
MOMENTO TORSIONANTE
}
=
A
T dA
C
2 max
t
..(I)
Pero
}
A
dA
2
es el momento polar de inercia del rea de la seccin transversal adems es
constante en toda el rea de la seccin y es designado por J.
}
=
A
dA J
2
..(II)
Para un elemento circular slido:
2
t = A , td dA 2 = , sustituyendo en la expresin II
2 4
2
4
2
2
4 4
0
0
4
3
c c
d J
c
c
t t t
t = = = =
}
; Como
2
d
c =
32
4
d
J
t
=
Sustituyendo en I,
C
max
t
32
4
d t
= T
J
C
T
max
t
=
o bien;
J
TC
=
max
t
max
t
MAX
t
t t
=
C
max
t
max
t
t
C
=
C
max
t
max
t
max
t
}
A
C
dA = T
ESFUERZO AREA BRAZO DE MOMENTO
FUERZA
MOMENTO TORSIONANTE
T dA
C
A
=
}
2 max
t
2
t = A ; td dA 2 =
}
=
C
d J
0
3
2 t =
32
4
d t
32
4
d
J
t
= , Circular Slida,
( )
32
4 4
di de
J
=
t
, Circular Hueco.
T J
C
=
max
t
J
TC
=
max
t , FORMULA DE LA TORSION.
ANGULO DE TORSION
C
A B x
D
E | d
D
max
T
dx
dx DD =
C d DD | =
, igualando las expresiones anteriores se tiene:
C d dx | =
De la ley de Hooke:
max
es proporcional al .
max
t
o sea:
G
t
= , donde G: mdulo de elasticidad al corte (mdulo de rigidez).
adems;
J
TC
=
max
t
sustituyendo tenemos:
|
t
Cd dx
G
=
| Cd dx
GJ
TC
= ; dx
GJ
T
d = |
integrando podemos determinar el valor de |
( )
( ) ( )
}
=
x
x J x G
dx x T
0
|
GJ
TL
= |
AE
PL
u =
CONCENTRACION DE ESFUERZOS
Se producen en ejes escalonados o sea donde el dimetro o seccin cambia bruscamente.
Los factores de concentracin de esfuerzos dependen de caractersticas geomtricas.
MIEMBROS DE SECCION NO CIRCULAR MACISA
1.- Existe alabeo,
2.- la deformacin angular no es lineal.
Los esfuerzos cortantes son nulos en los vrtices y mximos en los puntos medios de los lados
de mayor longitud.
b
max
t
c
2
max
bc
T
o
t =
G bc
TL
3
|
| =
b = lado mayor
c = lado menor
o y | dependen de la relacin
c
b
Para secciones delgadas donde c b))) , o y | tienden a
3
1
b/c 1 1.5 2 3 6 10
0.208 0.231 0.246 0.267 0.299 6.312 0.333
0.141 0.196 0.229 0.263 0.299 0.312 0.333
o
|
Problema 5.24
2a=b 2
2
= =
a
a
c
b
246 . 0 = o
a=c
2
max
bc
T
o
t = ;
) )( 2 ( 246 . 0
2
max
a a
T
= t
3
max
) 246 . 0 ( 2 a
T
= t (1)
229 . 0 = |
G a a
TL
G bc
TL
* * 2 * 229 . 0
3 3
= =
|
|
G a
TL
* 229 . 0 * 2
4
= |
Para barras circulares macizas:
J
Tc
d
T
= =
3
max
16
t
t ..(2)
4
32
d G
TL
GJ
TL
t
| = = ..(3)
Igualando (1) y (2) y despejando a d;
3 3
16
) 246 . 0 ( 2 d
T
a
T
t
=
3
3
) 246 . 0 )( 2 ( 16
t
a
d =
a d 36 . 1 =
Igualando tenemos, y despejando d;
4 4
32
2 * 229 . 0 d G
TL
G a
TL
t
=
t
) 229 . 0 )( 2 ( 32
4
4
a
d =
a d
4
) 229 . 0 ( 64
t
=
a d 47 . 1 =
Con estos valores vemos:
1.47a
Para ver la ventaja de una flecha sobre la otra, calculamos las reas:
rea:
2
2 * 2 a a a = , rea de la seccin rectangular.
2
2 2 2
70 . 1
4
16 . 2
4
) 47 . 1 (
4
a
a a d
= = =
t t t
Las flechas de seccin redonda son ms ligeras y resisten lo mismo.
Problema
6
x
2
20
32 2
4 4
2
d r
A d r J
t t
= = =
}
, pero r varia con x
Por tringulos semejantes:
10
1 2
20
= = x
x
Como el radio varia con x calculamos la ley de variacin:
10 30
3 x
r
x
r
= =
) (
10 * 2 10 2
4
4
4
x
x
J
t t
= |
.
|
\
|
=
} }
= =
L L
x
dx
G
T
GJ
Tdx
0
4
4
0
10 * 2
t
|
}
=
L
x
dx
G
T
0
4
4
10 * 2
t
|
}
=
L
dx x
0
4
6
4
* 10 * 12
10 * 2 * 27000
t
|
L
x
0
3
3 * 12
2 * 270
(
=
t
|
Pero el intervalo es de
|
30
10
ya que es un cono truncado
(
=
(
=
10000
1
27000
1
18
270
10
1
30
1
3 * 6
270
3 3
t t
|
( ) ( )
t t
|
2
30
10 * 296296 . 6
18
270
5
= =
rad
4
10 * 3
= |
0
02 . 0 = |
OTRA SOLUCION???????????????????????
}
=
75
25
4
4 5
10 * 2
10 * 4 . 8
27000
x
dx
t
|
75
25
3 3
75
25
4
4
3 * 4 . 8
10 * 2 * 7 . 2
* 105 * 4 . 8
104 * 2 * 10 * 7 . 2
= =
}
x
x
dx
t t
|
|
.
|
\
|
= |
.
|
\
|
=
3 3 3 3
25
1
75
1
209 . 68
25
1
75
1
3
627 . 204
|
5.4 BJ
d
e
=5cm t 210 t 135 t 375
d
i
=2.5cm
25 15 15 25
A B C D E
t 450 t 375
t 240
2
5
10 * 4 . 8
cm
kg
G =
J
TC
= t
3
16
d
T
SOL
t
t =
( )
4 4
16
di de
Tde
HUEC
=
t
t
( )
6 . 57
5
450 * 16
3
= =
t
t
t
AB
( )
72 . 30
5
240 * 16
3
= =
t
t
t
BC
( )
77 . 32
5 . 2 5
5 * 240 * 16
4 4
=
=
t
t
t
CD
( )
2 . 51
5 . 2 5
5 * 375 * 16
4 4
=
=
t
t
t
DE
b
max
t
c
L
2
max
bc
T
o
t =
G bc
TL
3
|
| =
b/c 1.0 1.2 1.5 2.0 2.5 3.0 4.0 5.0 10.0
0.208 0.219 0.231 0.246 0.258 0.267 0.282 0.291 0.312 0.333
0.1406 0.1661 0.1958 0.229 0.249 0.263 0.281 0.291 0.312 0.333
o
|
5.1
t
d=5cm
D
ext
=7.5cm d
int
t = espesor =?
Sabemos que
J
TC
=
max
t
2
d
c =
J = Momento polar de inercia.
Del rea de la seccin transversal
Es cte en toda el rea de la seccin.
Para el cilindro slido
32
4
d
J
t
=
Para cilindro hueco
( )
32
4 4
d D
J
=
t
3 4
4
max
16
16
32
2
d
T
d
Td
d
Td
sol
t t
t
t = =
|
|
.
|
\
|
= (1)
( )
( )
4 4 4 4
max
16
32
2
) (
d D
TD
d D
D T
hueco
=
|
|
.
|
\
|
=
t t
t .(2)
Igualando 1 y 2
( )
4 4 3
16
*
16
d D
TD
d
T
=
t t
Sustituyendo valores;
3 4 4
Dd d D =
( ) ( )( )
3 4 4
5 5 . 7 5 . 7 = d , ( ) ( )( ) 125 5 . 7 5 . 7
4 4
= d
64 . 0 86 . 6 5 . 7 = = = d D t 86 . 6 56 . 2976
4
= = d
La relacin de pesos de los dos ejes.
La relacin de pesos ser una relacin de reas
rea slida
mg w= ; g v w = ,
( )
26 . 15
64 . 1
25 '
4
4
2 2
2
2 2
2
= =
d D
d
d D
d
t
t
OTRA SOLUCION
d=5cm d
e
=7.5cm
t
J
TC
= t ,
32
4
d
J
SOL
t
= ,
( )
32
4 4
di de
J
HUECO
=
t
.
3
16
2 d
T
J
Td
t
t = =
( ) ( )
4 4 4 4
16
32
2 2 di de
Tde
di de
Tde
J
Tde
= =
t t
t
( )
4 4 3
16 16
di de
Tde
d
T
=
t t
( )
4 4 3
1
di de
de
d
=
3 4 4
ded di de =
5 . 7 * 5 5 . 7
3 4 4
= di
( )
4 4
5 . 7 125 5 . 7 di =
( ) cm di 86 . 6 5 . 7 125 5 . 7
4
4
= =
cm
di de
t 32 . 0
2
86 . 6 5 . 7
2
=
=
mg W = ,
v
m
= o , v m o =
v W o = , v W
S
o = , v W
H
o =
( )
4
4
2 2
2
di de
d
LA
LA
v
v
W
W
H
S
H
S
= = =
t
t
o
o
7 . 2
86 . 6 5 . 7
25
2 2 2 2
2
=
=
di de
d
W
W
H
S
A B C D E
500 cm*kg 8000 kg*cm 2500 kg*cm 6000 kg*cm 1000 kg*cm
d=2.5 d=10 d=7.5 d=7.5
90 cm 60 cm 60 cm 120 cm
1000
500
-5000
-7500
3
16
d
T
t
t =
( )
( )
= =
3
5 . 2
500 16
t
t
AB
( )
( )
= =
3
10
2500 16
t
t
BC
( )
( )
= =
3
5 . 7
5000 16
t
t
CD
( )
( )
= =
3
5 . 7
1000 16
t
o
DE
A B C D E
55 N*m 880 N*m 275 N*m 660 N*m 110 N*m
+
d=25 d=100 d=75 d=75
1500 1000 1000 2000
110
55
550
-825
J
TC
= t
32
4
d
J
t
=
2
d
C =
3
16
d
T
t
t =
( )
( )
6
9 3
10 * 93 . 17
10 * 25
55 16
= =
t
t
AB
( )
( )
6
9 3
10 * 2 . 4
10 * 100
825 16
= =
t
t
BC
( )
( )
6
9 3
10 * 63 . 6
10 * 75
550 16
= =
t
t
CD
5.1 Un eje de seccin circular maciza de 5cm de dimetro ha de ser sustituido por un eje
hueco tambin de seccin circular.
Si el dimetro exterior de este ltimo est limitado a 7.5cm, Cul debe ser el espesor del tubo
para el mismo material linealmente elstico trabajando con el mismo esfuerzo mximo?
Determnese la relacin de los pesos de los dos ejes.
Solucin
Sabemos que
J
TC
=
max
t ,
2
d
c =
Para el cilindro slido: Para el cilindro hueco:
32
4
d
J
t
=
( )
32
4 4
di D
J
=
t
3
4
max
16
32
2
d
T
d
Td
t
t
t =
|
|
.
|
\
|
=
( ) ( )
4 4
4 4
max
16
32
2
di D
TD
di D
TD
=
|
|
.
|
\
|
=
t
t
t
Igualando las expresiones anteriores:
( )
4 4 3
16 16
di D
TD
d
T
=
t t
3 4 4
Dd di D = ;
4 3 4
di Dd D + =
Sustituyendo valores tenemos:
( ) ( )( )
4 3 4
5 5 . 7 5 . 7 di + =
( ) ( )( )
4
3 4
5 5 . 7 5 . 7 = di
87 . 6 = di
32 . 0
2
=
=
di D
t
La relacin de pesos de los dos ejes es equivalente con la relacin de areas:
mg W = ; o tambin g v W =
2 2 2
1 1 1
2
1
g v
g v
W
W
= , como
2 1
g g = y
2 1
= :
2 2
1 1
2
1
2
1
l A
l A
v
v
W
W
= =
( )
2 2
2
2 2
2
2
1
4
4
di D
d
di D
d
A
A
=
t
t
( ) ( )
76 . 2
87 . 6 5 . 7
00 . 5
2 2
2
2
1
=
=
A
A
El material slido es 2.76 veces ms pesado y resisten lo mismo en torsin.
5.18
d 20 cm
n =200 RPM
2
400
cm
kg
per
= t
a) Potencia Mxima
b) d=?
SOLUCION
Se observa que se tienen cuatro pares, cada uno de ellos es mximo cuando el
=
2
400
cm
kg
per
t
) ( 5 . 1963
4
) 5 . 2 ( 400
) (
2
kg A F = = =
t
t
) / ( 10 5708 . 1 ) 20 )( 5 . 1963 ( 4 4
5
cm kg x Fl T
TOTAL
= = =
. . 440 77 . 438
71600
) 10 5708 . 1 )( 200 (
71600
. . .
5
V C
X nT
V C Pot
TOTAL
~ = = =
3 4
16
2
) 32 (
2 d
T
d
Td
J
Td
t t
o = = =
3
1
5
3
1
) )( 400 (
) 10 5708 . 1 )( 16 ( 16
(
=
|
.
|
\
|
=
t ot
X T
d
) ( 6 . 12 cm d =
5.2 500 kg/m 800 kg/m 2500 kg/m 6000 kg/m 1000 kg/m
d=2.5 cm d=10 cm d=7.5cm d=7.5 cm
90 cm 60 cm 60 cm 120 cm
7500
5000
T
-500 -1000
Sabemos que
J
TC
=
max
t
32
4
d
J
t
= , como
2
d
C =
3
max
16
d
T
t
t =
2
3
97 . 162
) 5 . 2 (
) 500 ( 16
cm
kg
= =
t
t
2
3
2 . 38
) 10 (
) 7500 ( 16
cm
kg
= =
t
t
2
3
36 . 60
) 5 . 7 (
) 5000 ( 16
cm
kg
= =
t
t
2
3
07 . 12
) 5 . 7 (
) 1000 ( 16
cm
kg
= =
t
t
Un eje cnico macizo de acero est rgidamente empotrado por un extremo y sometido a un par
de torsin T en el otro. Halle la rotacin angular en el extremo libre.
Si d
1
=6 y d
2
=2, T=27000 lb-in, G=12x10
6
lb/in. Supngase que son aplicables las hiptesis
usuales de la deformacin de ejes de seccin circular sometidas a torsin.
PENDIENTE DIBUJO NO HAY
2
4
2
r
dA r J
t
= =
}
y
x L L
=
2
10
20
20
) 20 ( 2 x x
y
=
=
Pero y r + =1
10
30
10
20
1
x x
r
=
+ =
4
4
4
10
) 30 ( x
r
=
} }
|
|
.
|
\
|
= =
2
) (
10 12
27000
4
6
x r
x
dx
GJ
Tdx
t
|
} }
=
|
.
|
\
|
=
4
4
6 4 6
) 30 (
10
) 10 12 (
) 27000 ( 2
10
30
) 10 12 (
) 27000 )( 2 (
x
dx
x
x
dx
x t t
|
L
x
x x
x
dx x
x
x x
x
dx
x
x x
0
3
6
4
4
6
4
4 6
4
3
) 30 (
10 12
10 ) 27000 ( 2
) 30 (
) 10 12 (
10 27000 2
) 30 ( ) 10 12 (
10 27000 2
(
= =
} }
t t t
|
(
=
(
=
3 3 3 3
30
1
10
1
2
30
30
1
) 20 30 (
1
) 3 ( 6
270
t t
|
rad x
4
10 006 . 3
= |
0
02 . 0 = |
d
1
T
1
T
2
d
2
A B C
a b
2500 t
10000 t
En el extremo fijo, el valor momento Torsor t 10000 = T
J
TC
= t
GJ
TL
= |
t 7500
1
= T t 2500
2
= T cm a 450 = cm b 150 =
2
6
10 2
cm
kg
x E =
2
5
10 4 . 8
cm
kg
x G =
cm d 5
2
=
2
400
cm
kg
per
= t
0
3 =
AC
|
?
1
= d
3
16
d
T
t
o =
3
16
to
T
d = cm d 368 . 7
) 400 (
) 1000 ( 16
3
1
= =
t
t
cm d 61 . 4
400
) 2500 ( 16
3
2
= = . Ya que el dimetro es d
2
=5(cm), se puede afirmar que cumple la
condicin del . o
BC AB AC
| | | + =
} }
+ =
C
B
BC
B
A
AB
AC
GJ
dx T
GJ
dx T
|
052359877 . 0
1
= |
.
|
\
|
+ =
} }
B
A
C
B
BC AB AC
dx T dx T
GJ
|
052359877 . 0
32
5
) 150 ( 2500
32
) 450 ( 10000 1
4 4
=
|
|
|
|
.
|
\
|
+ =
t
t
t
t
|
d GJ
AC
= + = |
.
|
\
|
+ = 022857142 . 0
4285714 . 171
625
) 150 ( 2500 450 10000
10 4 . 8
32
4 4 5
d
x
d
x
x
AC
t
t
|
) ( 73 . 8
029502735 . 0
4285714 . 171
4
cm d = =
5.5
A
T
B
T
C
d
1
d
2
B C
6 m 3 m
. . . 25 m p r n =
. . 25
.
V C B = =
n
V C
T
. . 71600
= ..(1)
. . 75
.
V C C = =
3
16
d
T
J
TC
t
t = = ...(2)
2
400
cm
kg
= t
GJ
TL
= | ..(3)
2
5
10 4 . 8
cm
kg
X G =
3
16
to
T
d = .(4)
d
1
=?, d
2
=?, . ? = |
) ( 10 16 . 7
25
) 25 ( 71600
4
kgcm X T
B
= =
) ( 10 148 . 2
25
) 75 ( 71600
5
kgcm X T
B
= =
Aplicando (2) determinaremos los valores de los dimetros
) ( 696 . 9
400
) 10 16 . 7 ( 16
3
4
1
cm
x
d = =
t
) ( 98 . 13
400
) 10 148 . 2 ( 16
3
5
2
cm
x
d = =
t
Aplicando la ecuacin (3) determinaremos el ngulo de torsin
rad x
x
x
2
5 4
4
10 88 . 5
) 10 4 . 8 ( ) 7 . 9 (
) 32 )( 600 )( 10 16 . 7 (
= =
t
|
0 0 2
4 . 3 37 . 3
180
10 88 . 5 ~ = |
.
|
\
|
=
t
| x
5.6
PROBLEMA
Al con d=0.5(cm) t | 2 =
L=?,
2
400
cm
kg
s t ,
2
5
10 7 . 2
cm
kg
x G =
GJ
TL
= | ,
J
TC
= t , Despejamos L y T.
T
GJ
L
|
= ,
C
J
T
o
=
32
4
T
d G
L
t |
= ,
16
32
2
3 4
d
d
d
T
ot ot
= =
Sustituimos quedando:
o
|
ot
t |
2
16
32
3
4
Gd
d
d G
L =
|
|
.
|
\
|
=
) 400 ( 2
5 . 0 ) 10 7 . 2 )( 2 (
5
x
L
t
=
) ( 29 . 1060 cm L =
Ver pagina 210
5.7
15 cm
2
De
d
i
= di De 2 =
2
5
10 4 . 8
cm
kg
X G = ,
0
12
1
por cada cm*kg de par torsor.
De=?.
Tomamos un momento torsor de 1 kg*cm rad x
3
0
10 4544 . 1
12
1
= = |
Como L=15 cm y adems sabemos que
GJ
TL
= | ,
( )
32
4 4
di De
J
=
t
Sustituyendo se tiene que:
( ) ( ) ( )
32
16
32
2
4 4 4 4
di di di di
J
=
=
t t
32
15
4
di
J
t
=
5 4
3
10 4 . 8 15
) 32 )( 15 )( 1 (
10 4544 . 1
x d
x
t
=
302 . 0
10 4 . 8 * 10 4544 . 1 *
32
4
5 3
= =
x x
di
t
Como
2
De
di = , ) 302 ( 2 = De
). ( 6 . 0 cm De =
5.8
d
i
De d
De=10 cm, di=7.5 cm, d=?
J
TC
= t ,
32
4
D
Js
t
= ,
( )
32
4 4
di De
J
H
=
t
,
GJ
TL
= |
3
16
d
T
S
t
t = ;
( )
4 4
16
di De
TDe
H
=
t
t
Como no se debe exceder el
max
o igualamos las ecuaciones anteriores:
( )
4 4
16
di De
TDe
t
=
3
16
d
T
t
,
3 4 4
1
d di De
De
=
) ( 809 . 8
10
5 . 7 10
3
4 4
3
4 4
cm
De
di De
d =
=
) (
32
4 4
di De G
TL
H
=
t
| ,
4
32
di G
TL
S
t
| =
Igualando las ecuaciones anteriores:
4 4 4
32
) (
32
d G
TL
di De G
TL
t t
=
,
4 4 4
d di De =
) ( 09 . 9 5 . 7 10
4 4 4
cm d = = , Este dimetro es el mnimo.
BJ 304
Determine el ngulo de rotacin del extremo E cuando se aplica el momento torsor T en el
extremo E.
E
|
L
A
A
|
B
| C B
C C
GJ
TL
B E
B
E
= = | | |
B A
r r 2 =
F
F`
En primer lugar determinaremos el momento torsor T
AD
, observamos que en el contacto se
aplican fuerzas iguales y opuestas en el punto C y como r
A
=2r
B
, podemos concluir que el
momento T
AD
=2T.
Como el extremo D es fijo el ngulo de torsin en A se calcula como:
GJ
TL
GJ
L T
AD
A
2
= = |
r
A
r
B
D
E
Observemos que necesariamente los arcos C, C
y CC
son iguales, adems el arco es igual al
radio por el ngulo, se tiene:
B B A A
r r | | = ,
A
B
A
B
r
r
| |
|
|
.
|
\
|
= ,
B A
r r 2 = ,
GJ
TL
A B
4
2 = = | | .
Consideremos el rbol BE, el ngulo de torsin del rbol es igual al ngulo
B
E
| , por lo que:
GJ
TL
GJ
L T
BE
B
E
= = |
Finalmente, el ngulo de rotacin del punto E se determina mediante:
GJ
TL
GJ
TL
E
+ =
4
| , es decir:
B
E B E
| | | + = .
PROBLEMA
40 cm
C
20 cm
T=5000
E
3 m
6 m
}
=
L
GJ
Tdx
0
| ,
2
5
10 4 . 8
cm
kg
X G = , d=5(cm)
GJ
L T
AB
B
= | , como
D B
r r 2 = , podemos concluir que T
AB
=2T
) ( 058205236 . 0
32
5
10 4 . 8
300 10000
4
5
rad
x
x x
x
B
= =
t
|
Podemos afirmar que en el punto de contacto los arcos que se forman en ambos engranes son
iguales y como el producto del ngulo por el radio es igual al arco, podemos escribir que
D D B B
r r | | = , o sea
B
D
B
D
r
r
| | = , o bien
B D
| | 2 = .
A
B
D
) ( 116410472 . 0 rad
D
= |
Por otro lado
) ( 058205236 . 0
32
5
10 4 . 8
600 5000
4
5
rad
x x
x
D
E
= =
t
|
Por lo tanto:
D
E D E
| | | + =
058205236 . 0 116410472 . 0 + =
E
|
) ( 174615708 . 0 rad
E
= |
0
10 =
E
|
PROBLEMA
F
1
F
1
T
CD
=?
F
2
200
F
2
= 0
B
M , + 100-1.5F
1
=0, F
1
=66.7
= 0
F
M , + 200-2(F
2
)=0. F
2
=100
= 0
C
M , -6F
1
+6F
2
+T
CD
=0
T
CD
=6(66.7)-6(100)=-199.8
C C B B
r r | | =
B
C
F
C C C
B
C
B
r
r
| | | | 4
5 . 1
6
= = =
F F C C
r r | | = ,
C C
F
C
F
r
r
| | | 3 = =
026 . 0
75 . 0 10 11
32 36 8 . 199
4 6
= = = =
x x x
x x
GJ
L T
CD CD
D
C C
t
| |
014 . 0
75 . 0 10 11
32 48 100
4 6
= = =
x x x
x x
GJ
L T
AB AB
B
A
t
|
6281 . 0
75 . 0 10 11
32 48 200
4 6
= = =
x x x
x x
GJ
L T
EF EF
F
E
t
|
0
02 . 4 019 . 4 0702 . 0 4 = = = + = + =
B
A C
B
A B A
| | | | |
0
23 . 5 228 . 5 0912 . 0 3 = = = + = + =
F
E C
F
E F E
| | | | |
PROBLEMA
40 mm
A
T=1000 Nm
600 mm
400 mm
100 mm
MPa 60
max
s o
0
5 . 1 =
D
|
GPa G 80 =
d=?
= 0
C
M , F(40)-1000=0; 25
40
1000
= = F
= 0
B
M , 0 ) 100 ( =
B
A
T F
2500 ) 100 ( 25 = =
B
A
T
Adems como las reas son iguales se cumple lo siguiente
C C B B
r r | | = ;
B
C
B
C
r
r
| | =
B C
| | 5 . 2 =
En primer lugar determinaremos el dimetro tomando la condicin del esfuerzo cortante.
Para el rbol CD;
3
16
d
T
t
o =
3
16
to
T
d =
) ( 04394 . 0
10 60
) 1000 ( 16
3
6
mts
x x
d = =
t
, como T
AB
=2.5T
CD
C
B
Para el rbol AB ) ( 059647 . 0
10 60
) 2500 ( 16
3
6
mts
x x
d = =
t
GJ
TL
= | ;
4 9 4 9
3
10 80
32000
10 80
32 10 400 2500
d x d x x
x x x
B
t t
| = =
;
4 9
3
10 80
32 10 600 1000
d x x
x x x
AC
t
|
= , y como 026179938 . 0 5 . 1
0
= =
DA
|
Adems
C
D C D
| | | + = ,
) ( 06231 . 0
026179938 . 0 10 80
)) 600 ( 1000 400 ) 2500 ( 5 . 2 ( 10 32
4
9
3
mts
x x x
x
d =
+
=
t
3.8
60 mm
B
60 mm
38 mm
B
25 mm
300 mm
T=1800 N*m
G=26 GPa
? = t
? = |
2
1
ab c
T
= t
G ab c
TL
3
2
= |
9 2
10 ) 60 )( 60 ( 208 . 0
1800
=
x
t
9 2 3
3
10 26 10 ) 60 )( 60 ( 1406 . 0
) 10 300 ( 1800
x x x
x
= |
9 2
10 ) 38 )( 95 ( 258 . 0
1800
=
x
t
9 12 3
3
10 26 10 ) 38 )( 95 ( 249 . 0
10 300 1800
x x x
x x
= |
1 0.208 0.1406
1.2 0.219 0.1661
1.5 0.231 0.1958
2 0.246 0.229
2.5 0.258 0.249
3 0.267 0.263
4 0.282 0.281
5 0.291 0.291
10 0.312 0.312
0.333 0.333
b
a
1
c
2
c
ESFUERZOS POR FLEXION EN VIGAS
En este capitulo se relaciona el momento flexionante interno con los esfuerzos que causa en una
viga.
- Una barra delgada no puede ser sometida a compresin pues su comportamiento no es de
acuerdo a los criterios establecidos (se pandean).
- Todas las cargas se aplican sin choque o impacto.
- Existe equilibrio entre las fuerzas externas e internas.
- Las deformaciones producidas estn relacionadas con los esfuerzos mediante relaciones
apropiadas esfuerzo deformacin.
La teora aplicada aqu se emplea en la mayora de las vigas que se emplean en armaduras
y otras estructuras y como elementos de mquinas.
- Selecciones planas de una viga, normales a su eje, permanecen planas despus que la
viga se someta a flexin. Esta hiptesis es verificada por completo en miembros
rectangulares elsticos en flexin pura.
P P
a L-2a a
P
V = 0
V
EXT
-P
Pa
M
ESFUERZOS POR FLEXION EN VIGAS
En este capitulo se relaciona el momento flexionante interno con los esfuerzos que causa en una
viga.
- Una barra delgada no puede ser sometida a compresin, ya que el comportamiento no es
de acuerdo a los criterios, es decir se pandean.
- Todas las cargas se aplican sin choque o impacto.
- Existe equilibrio entre las fuerzas externas e internas.
- Las deformaciones producidas estn relacionadas con los esfuerzos mediante relaciones
apropiadas esfuerzo deformacin.
LA TEORIA APLICADA AQU ES EMPLEADA EN LA MAYORIA DE LAS VIGAS QUE
SE EMPLEAN EN ARMADURAS Y OTRAS ESTRUCTURAS Y COMO ELELMENTOS
DE MAQUINAS.
Secciones planas de una viga, normales a su eje, permanecen planas despus que la viga se
somete a flexin. Esta hiptesis se verifica por completo en miembros rectangulares elsticos en
flexin pura.
Al aplicarle un Momento Flexionante
al aplicarse un momento flexionante
Obsrvese que las rectas AB y CD siguen permaneciendo rectas aun despus de la flexin. Lo
anterior solo se logra cuando un material est sometido a flexin pura.
Un ejemplo tpico es le siguiente.
P P
A B
R
A
=P
V = 0 V
R
B
Flexion pura
M
Por facilidad tomamos la seccin transversal que contiene los puntos A
y B
colocados en
forma vertical.
Plano neutro
D
A
Eje neutro
a
b
-y fibra
neutra
e f
u A
B C
x A
Existen fibras tales como la a-b que no se deforma y se les llaman fibras neutras.
En el espacio dichas fibras forman el plano neutro.
A la interseccin del plano neutro con el rea de la seccin transversal se le conoce como eje
neutro; en ese lugar tanto la deformacin como el esfuerzo son nulos.
ab ef //
Sea u A un alargamiento y x A la longitud inicial de la fibra ab
dx
du
x
u
x x
=
A
A
=
A 0
lim c
Debe observarse que los alargamientos de fibras diferentes inicialmente de la misma longitud,
varan en forma lineal desde el eje neutro.
En una viga sometida a flexin las deformaciones lineales de sus fibras son directamente
proporcionales a sus distancias respectivas a la superficie neutra
o sea by
x
= c , donde b=cte de proporcionalidad
E H
-y
C y =
max
F G
max
c
Dichas deformaciones estn asociadas a los esfuerzos que actan normalmente a la seccin
transversal de una viga.
FORMULA DE FLEXIN ELASTICA
De acuerdo a la ley de Hooke
x x
Ec 0 =
Los esfuerzos normales
x
0 varan directamente proporcionales a sus distancias respectivas al
eje neutro.
Sustituyendo
x
c en la ley de Hooke Eby
x
= 0
by
x
= 0 (1)
B=bE
Y puede ser >0 o <0
B se puede relacionar con el momento flexionante y las propiedades de la seccin transversal.
Por condiciones de equilibrio 0 = Fx ,
Adems A F 0 =
Para un elemento diferencial 0 =
}
dA
A
x
0 ..(2)
Fuerza
Sustituyendo (1) en (2):
} }
= =
A A
ydA B BydA 0
y A=0, 0 = y .
Como 0 = B 0 =
}
A
ydA
Por definicin 0 = =
}
A y ydA
A
Primer Momento de rea
donde: y es la distancia desde el eje neutro hasta el centroide del rea A.
0 = A y , y como 0 = A
0 = y la distancia del eje neutro al centroide es nula.
El eje neutro debe pasar por el centroide del rea de la seccin transversal.
Al determinar el centroide, automticamente determinamos el eje neutro.
De la segunda ecuacin de equilibrio
= 0
z
M +
( ) 0 = +
}
y dA M
A
x
0
donde y = brazo de momentos medido a partir del eje neutro para una fuerza infinitesimal
( ) dA
x
0
( )y dA M
A
x
}
= 0
( )y BydA
A
}
=
dA By
A
}
=
2
}
=
A
dA y B
2
2
0
Momento de rea o Momento de Inercia I
BI M =
I
M
B =
Y
B
o
=
Regresando a (1)
I
My
= o
La ecuacin
I
My
= o indica que para momento flexionante positivo y valores positivos de y,
los esfuerzos axiales
x
o son de compresin, para valores negativos de y, los
x
o son de tensin.
Sea
max
Y C = = mayor distancia desde el eje neutro.
I
MC
= o
(Esta ecuacin indica que para M positivo y valores positivos de Y) NO
Se elimina el signo ya que por simple observacin se puede saber si es tensin o compresin.
|
|
|
.
|
\
|
0 0 0
0 0 0
0 0
x
o
8
2
2
6
4
5.75
A
1
A
2
A
3
16 8 * 2
1
= = A
11
1
= y
12 6 * 2
2
= = A
7
2
= y
23 75 . 5 * 4
3
= = A
2
3
= y
T
i i
A
A y
y
=
A y I I
C
2
0
+ =
3
12
1
bh I
C
=
9411 . 6
51
354
23 12 16
) 2 * 23 ( ) 7 * 12 ( ) 16 * 14 (
= =
+ +
+ +
= y
25 . 7 = y
OTRA SOLUCION
8
2
2
6
6
4
5.75
}
= ydA A y
1
,
T
A
ydA
y
}
= ,
T
i i
A
A y
y
=
3
1
2
G
Area No.
1 2 5.75x4=23 2x23= 46
2 7 2x6=12 7x12= 84
3 11 2x8=16 11x16=176
=51 =306
i
y
i
A
i i
A y
6
51
306
= = y
Por el teorema de ejes paralelos A y I I
C
2
0
+ = ,
3
12
1
bh I
C
=
Area No.
1 30.67 4 16 23 368 398.67
2 36.00 1 1 12 12 48.00
3 5.33 5 25 16 400 405.33
852.00
A
A y I
C
2
+ y
C
I
2
y
A y
2
67 . 30 ) 4 )( 75 . 5 (
12
1
3
1
= =
C
I
, 36 ) 6 )( 2 (
12
1
3
2
= =
C
I ,
33 . 5 ) 2 )( 8 (
12
1
3
3
= =
C
I
.
4
) ( 852 in I = .
Determine las coordenadas del eje centroidad.
6
1
8
1
A y ydA
A
=
}
o tambin
= A y A y
i i
T
A
ydA
y
}
=
T
i i
A
A y
y
=
Area No.
1 4 8 32
2 7.5 5 37.5
=13 =69.5
i
y
i
A
i i
A y
35 . 5
13
5 . 69
= = = y y
C
Area No.
1 0.5 8 4
2 3.5 5 17.5
=13 =21.5
i
y
i
A
i i
A y
65 . 1
13
5 . 21
= = = y zC
Las coordenadas son: ( ) ( ) 65 . 1 , 35 . 5 , =
C C
Z y
y
1.65
z
5.35
y
h
z
b
3
12
1
bh I
C
=
A y I I
C z
2
0
+ = , por el teorema de ejes paralelos.
bh
h
bh I
2
3
0
2 12
1
|
.
|
\
|
+ =
3 3
0
4
1
12
1
bh bh I + =
3
0
3
1
bh I =
Como se distribuye la masa con respecto a los ejes.
y
Problema Schaums
6 4 6
4
18
14
4
8 8
12665 ) 4 )( 6 ( ) 20 ( ) 4 ( 6
2
1
) 4 )( 6 ( ) 20 ( ) 4 ( 6
12
1
) 4 ( 8
3
1
) 22 ( 2
3
1
) 4 ( 8
3
1
2 3 2 3 3 3 3
=
(
+ +
(
+ + + + = I
12665 =
XG
I
POR OTRO METODO
12666 ) 4 )( 16 ( ) 72 . 9 ( ) 4 )( 16 (
12
1
) 14 )( 4 ( ) 72 . 0 ( ) 14 )( 4 (
12
1
) 4 )( 40 ( ) 28 . 8 ( ) 4 )( 20 (
12
1
2 3 2 3 2 3
= + + + + + =
XG
I
3
2
1
4 5
2
1 2
MECANICA DE SLIDOS
SERIE V
6.11
A)
b=h
Eje
neutro h
h
3 3
max
6
12
2
h
M
bh
h
M
I
MC
A
= = = o
B)
c
c
3
C
h
h c
2
2
= ; 2c=b,
|
|
.
|
\
|
+ =
|
|
.
|
\
|
+ =
|
|
.
|
\
|
|
.
|
\
|
+ =
9
2
9
2
9 18
2
3 2 36
4 4 2 2 4
2
3
c c c c c c bc bc
I
4 4 4
12
1
4
1
3
1
3
1
h h c I = = =
3
4
max
72
12
1
2
2
h
M
h
h M
B
= = o
Si
B A
o o =
3 3
72
6
h
M
h
M
B A
= , 2
6
72
= =
B
A
M
M
2 =
B
A
M
M
6.12
Caso 1
a 10 cm
A B 2.5 cm
200 cm 100cm
25 cm
z F(G(1)
100/3 F V 200/3 F
M
2.5 cm
2/3 F
F F
A
3
1
=
F F
B
3
2
=
Localizamos z
25 . 76
) 25 )( 75 . 21 ( ) 25 . 0 )( 25 . 51 ( +
= =
A
z A
z
i i
0201 . 14 = z
Ahora calculamos I:
072 . 4030 = I
Si
I
Mc
=
max
o , y F M
3
200
max
= , entonces:
c
I
F
max
200
3 o
=
Tomando en cuenta el F.S.=1.5
2
33 . 133
5 . 1
200
cm
kg
PER
TEN
= = o
2
66 . 266
5 . 1
400
cm
kg
PER
COMP
= = o
Para el caso 1)
) ( 08 . 1796
) 975 . 8 (
) 072 . 4030 )( 66 . 266 (
200
3
kg F
a
COMP
= =
) ( 86 . 574
) 0205 . 14 (
) 072 . 4030 )( 33 . 133 (
200
3
kg F
b
TEN
= =
Si F| entonces la compresin en b y la tensin en a y
max
M es el mismo
Para el caso 2)
) ( 73 . 1149
) 0205 . 14 (
) 072 . 4030 )( 66 . 266 (
200
3
kg F
b
COMP
= =
) ( 04 . 848
) 975 . 8 (
) 072 . 4030 )( 33 . 133 (
200
3
kg F
a
TEN
= =
) ( 04 . 848
max
kg F =
6.13 2.5
M M 10
2.5 z
e
2
1000
cm
kg
com
= o
2
350
cm
kg
ten
= o
I
Mc
=
max
o
Encontramos z en funcin de e
Area No.
1 1.25 2.5 3.125
2 6.25 18.75 117.1875
i
z
i
A
i i
z A
e e
e
e
5 . 2 75 . 18
125 . 3 1875 . 117
+
+
= z .(1)
De acuerdo a los datos
I
z M ) 10 (
1000
= .(2)
I
z M
= 350 .(3)
De (2)
z I
M 350
= ..(4)
Sustituyendo (4) en (2)
2
1
) 10 (
350
1000 z
z
= 5926 . 2 = z
Sustituyendo z en (1)
e
e
5 . 2 75 . 18
125 . 3 1875 . 117
5926 . 2
+
+
= ) ( 4 . 20 43 . 20
125 . 3 4815 . 6
57625 . 68
cm = =
= e
) ( 4 . 20 cm = e
Ahora calculamos I con ) ( 4 . 20 cm = e
74 . 458 ) 66 . 3 )( 5 . 7 )( 5 . 2 (
12
) 5 . 7 )( 5 . 2 (
) 35 . 1 )( 5 . 2 )( 4 . 20 (
12
) 5 . 2 )( 4 . 20 (
2
3
2
3
= + + + = I
cm kg
z
I
M * 61993
5926 . 2 10
) 74 . 458 ( 1000
10
1000
=
=
cm kg M * 62000 =
6.14
2.5 7.5 2.5
2.5
x
12.9cm 5.4cm
5cm cm z 5 =
12.5
2
6 6
1890 ) 10 1 . 2 )( 10 900 (
cm
kg
x x F
x
= = =
c o
cm Pkg M * 40 =
Localizacin de z
Area No.
1 37.5 2.5 93.75
2 32.25 6.45 208.0125
3 32.25 6.45 208.0125
102 509.775
i
z
i
A
i i
z A
) ( 5
102
775 . 509
cm z = =
Encontramos I
56 . 1342 ) 45 . 1 )( 25 . 32 (
12
) 9 . 12 )( 5 . 2 (
2 ) 5 )( 5 . 7 (
3
1
2
3
3
=
(
+ + = I
Si
I
Pz
I
Mz 40
= = o
z
I
P
40
o
=
Y z=5.4cm
) ( 74 . 11
) 4 . 5 ( 40
) 56 . 1342 )( 1890 (
TON P = =
) ( 74 . 11 TON P =
3
2
1
6.44
5 cm
C=2.5 cm
5 cm
cm r 5 . 7 =
2
1000
cm
kg
per
= o
cm r 5 . 7 =
eno max
o Se tiene en la parte inferior de la viga, es decir de a a.
r=5cm
Y de la formula 6.23 obtenemos R como:
cm c r r R 2855 . 7
2
1
) ) 5 . 2 ( ) 5 . 7 ( 5 . 7 ( 2 / ) (
2 2 2
2
= + = + + =
Y de
) (
) ((
R r A
R M
o
cm kg
r R
R r rA
M * 95 . 9213
) 5 2855 . 7 ( 4
) 2855 . 7 5 . 7 ( ) 5 )( )( 5 ( 1000 ) (
2
=
=
t o
cm kg M * 95 . 9213 =
Un portalibros hecho de placa de vidrio de x 8 x 36 para que tenga una larga vida de
servicio no debe estar esforzado a mas de 1000 PSI de tensin. Si los soportes estn colocados
en la distancia optima, estime el peso promedio de libros por unidad de longitud que puede ser
colocado sobre el cristal. Considere en el centro del claro el valor absoluto mnimo para el
momento.
a L-2a a
PoL
2
PoL
2
PoL
Poa
PoL
2
Poa
Poa Poa
PoL
2
2 2
) (
2
0 0
1
a P a a P
A = =
( )( )
2 4
2 2
2
2
2
2
2
2
2 2
0 0
0 0
0
0
2
x
a L a P L P
a L a P L P
a
L
a P
L P
A
=
|
.
|
\
|
|
.
|
\
|
=
|
.
|
\
|
|
.
|
\
|
=
( )( ) ( )( ) ( ) ( ) ( )
2
18
2
18 18
4
2 36 18
8
2 36 2 36
0
2
0 0 0 0 0
2
P a a P a a a P P a a P P
A
=
=
=
=
( )
2
18
0
2
2
P a
A
=
( )
2 2
18
2
0 0
2
1 2
a P P a
A A m
= =
( )
2
36 324
2
0
2
0
a P a a P
m
+
=
2
36 324
0 0
aP P
m
=
0 0
18 162 aP P m =
Como 0 = m 0 18 162
0 0
= aP P
162 18 = a
9
18
162
= = a
El momento en los apoyos
2
81
2
0
2
0
P a P
M = =
Se toma este valor del diagrama ya que en esos puntos es mximo.
8
4
3
3
96
1
8
1
12
1
64
1
8
12
1
4
1
8
12
1
12
1
in bh I = |
.
|
\
|
|
.
|
\
|
= |
.
|
\
|
= |
.
|
\
|
= =
I
Mc
= o ;
16
96 81
96
1
8
1
2
81
1000
0
0
x P
P
=
|
.
|
\
|
|
.
|
\
|
=
in
lb
x
x
P 06 . 2
96 81
16 1000
0
= =
BARRAS CURVAS EN FLEXION PURA
Viga Recta
e b
a | d Centroide
E.N.
b +Y
g
d c f
|
r
i
r dA
R
r
r
e
La longitud gh depende de r el alargamiento ser | d r R ) (
La longitud inicial es | r
Como se trabaja en el rango elstico c o E =
( )
|
|
.
|
\
|
=
|
|
o
r
d r R
E .(1)
o tambin: despejando
|
| o d
E
r R
r
=
...(2)
Para determinar el eje neutro
= 0 Fn (la suma de fuerzas normales a la seccin es igual a
cero), y tomando un elemento dA como se muestra en la figura.
0
) (
=
=
} }
dA
r
d r R E
dA
A A
|
|
o , con . , , , ctes d R E = | |
0 =
(
=
} } }
A A A
dA
r
dA
R
Ed
dA
|
|
o .(3)
} }
=
A A
dA
r
dA
R 0
} }
}
= =
A A
A
r
dA
A
r
dA
dA
R
Donde A es el rea de la seccin transversal localizada en el eje Neutro.
de que este eje no coincide con el centroide.
Recordando que los momentos internos son iguales a los externos.
= 0 Mz ,
}
=
A
dA M o ( ) r R = dA
r
d r R r R E
A
}
|
| ) )( (
Y como | , , R E y | d son constantes
( )
dA
r
r R Ed
dA
r
d r R E
A A
} }
=
2 2
) (
|
|
|
|
, y como
|
|
o
r
d r R E ) (
=
dA
r
r R
r R
dA
r
d r R E
A
r
A
} }
2 2
) ( ) ( o
|
|
dA
r
r Rr Rr R
r R
M
r
}
+
=
2 2
o
(
=
} } } }
A A A A
r
rdA dA R dA R
r
dA
R
r R
M
2
o
(
+ |
.
|
\
|
=
} } } }
A A A A
r
rdA dA R dA
r
dA
R R
r R
M
o
= 0 de la ec. (3) adems
}
=
A
A r rdA
| | A r RA
r R
M
r
+
=
o
) ( RA A r
r R
M
r
=
o
De donde el esfuerzo normal que acta en una viga curva a una distancia r del centro de
curvatura es:
) (
) (
R r rA
r R M
= o
Si la y positiva se mide hacia el centro de curvatura y e R r = , podemos escribir:
) ( y R Ae
My
= o , que es semejante a la ecuacin de flexin en vigas rectas.
a) Variacin de la deformacin
b) Distribucin de esfuerzos c) Seccion transversal de la viga
c) Distribucin de esfuerzos
} } }
= = =
e
i
e
i
r
r
r
r A
r
dr
b
bh
r
dr
b
bh
r
dA
A
R
916 . 24
5 . 22
5 . 27
ln
5
ln
= = =
i
e
r
r
h
R
e
r
i
r M
M
2
98 . 766
25 . 47
36240
) 916 . 24 25 )( 5 )( 5 ( 5 . 22
) 5 . 22 916 . 24 ( 15000
cm
kg
T
= =
= o
2
16 . 671
75 . 57
38760
) 916 . 24 25 )( 25 ( 5 . 27
) 5 . 27 916 . 24 ( 15000
cm
kg
c
= =
= o
Ejemplo: Flexin en Vigas Curvas
Comprense los esfuerzos de una barra rectangular de 5 cm x 5cm, sometida en sus extremos a
la accin de pares de 15000 kg*cm en tres casos especiales:
a) como viga recta
b) como viga curva con su eje longitudinal curvado con un radio de 25 cm es decir
cm r 25 =
c) como viga curva con cm r 5 . 7 =
5 cm x 5 cm
h
dr
b
r r
M r
i
r
e
SOLUCION
a)
I
Mc
= o ,
2
2 2
3
720
) 5 )( 5 (
) 15000 ( 6 6
12
1
2
cm
kg
bh
M
bh
h
M
= = =
|
.
|
\
|
= o
Para resolver los incisos b y c debemos primeramente determinar la posicin del eje neutro:
}
=
A
R
dA
A
R , de la figura bdr dA =
|
|
.
|
\
|
= = = =
} }
i
e
r
r
r
r
r
r
r
r
b
A
r b
A
r
dr
b
A
r
bdr
A
R
e
i
e
i
e
i
ln
ln
2007 . 0
5
22 . 1 ln
5
5 . 22
5 . 27
ln
5
ln ln
= = = = =
i
e
i
e
r
r
h
r
r
b
bh
R
cm R 92 . 24 =
2
67 . 806
) 08 . 0 )( 5 . 2 ( 5 . 22
) 5 . 22 92 . 24 ( 15000
) (
) (
cm
kg
R r A r
r R M
i
i
T
=
= o
2
64 . 703
) 08 . 0 )( 25 ( 5 . 27
) 5 . 27 92 . 24 ( 15000
) (
) (
cm
kg
R r A r
r R M
e
e
c
=
= o
-ESFUERZOS CORTANTES EN VIGAS
a P P a
A B
P
V
-P
dM M=Pa
M
dx
Tomamos un tramo de viga y lo analizamos.
dx
MA+dM
MA B
F
A
F
B
}
= dA F
A A
o
}
= dA F
B B
o
dA
I
y M
F
A
A
}
= dA
I
y dM M
F
A
B
}
+
=
) (
. .
A
o A B
B
o
y
I
y M
A
A
= o ,
I
y M
B
B
= o
2
d
E.N.
y
dA
I
y M
F
A
A
}
= ; dA
I
y M
F
B
B
}
= b
dA
I
y M
F
A
A
}
= ; dA
I
y dM M
F
A
B
}
+
=
) (
, dM M M
A B
+ =
dF ydA
I
dM
F F
d
y
A B
= =
}
2
= fuerza desarrollada en una distancia dx.
Si dividimos q
dx
dF
= = flujo cortante = fuerza/unidad de longitud.
}
= =
2
1
d
y
ydA
I dx
dM
dx
dF
q
Como V
dx
dM
=
}
=
2
d
y
ydA
I
V
q , pero Q A y ydA = =
}
y = distancia desde el E. N. hasta el centroide del rea analizada.
I
VQ
q =
q Es mxima cuando A y es mxima, esto sucede en el E. N.
A = rea seccin analizada.
Como | |
1
= FL q y sabemos que | |
2
FL o
q
b
b
q
= o
Ib
ydA V
Ib
VQ }
= = o
TORSION FLEXION CORTANTE
o 0 = t
max
o
max
t
0 = t
EJEMPLO
E.N. y = a/4
a
2
a
C
3
max
12
1
Ca V = ,
}
= = ydA
Ib
V
Ib
Q V
max max
max
t
C
a
A
2
=
A y Q =
3 2
2
max
3
max
max
8
12
12
1
2 4
a C
C a V
C Ca
C
a a
V
=
|
.
|
\
|
|
.
|
\
|
= t
Ca
V
max
max
2
3
= t
T
A
V
2
3
max
= t
y E.N.
Ib
A y V
max
max
= t , r b 2 =
Q A y dA y = =
}
,
t 3
4r
y =
2
2
r
A
t
=
4
4
r
I
t
=
5 2
3
max
4
2
max
max
12
16
2 2 3
4 4
r
r V
r r
r r V
t
t
t t
t
t = =
2
max
3 max
3
4
r
V
t
t =
T
A
V
max
max
3
4
= t
PENDIENTES DE DEFINIR ULTIMAS FORMULAS.
b
Ejemplo
? = V
Sabemos que A F o =
F
|
|
.
|
\
|
|
.
|
\
|
=
|
|
.
|
\
|
=
2
2
8
1
1000
4
4000 t
td
F
|
.
|
\
|
=
64
1000
t
F
lb F 09 . 49 =
Como
S
F
q = ;
I
ydA V
q
}
=
= =
=
=
2
1 . 0 ) 5 . 0 )( 2 . 0 (
20
3
m A
Y
A Y , Q x A Y = = =
200
3
10
1
20
3
192
1
16 12
1
8
1
2
1
12
1
2
1
2
1
12
1
12
3
3
= = = |
.
|
\
|
= =
x
bh
I
V
V
V
q 88 . 2
200
) 192 ( 3
192
1
200
3
= =
|
.
|
\
|
|
.
|
\
|
=
in
lb
V q 88 . 2 = , V q
S
F
88 . 2 = =
7269 . 22
3 88 . 2
4 1 . 49
4
3
88 . 2
1 . 49
5 88 . 2
= =
|
.
|
\
|
= =
x
x
x
F
V
) ( 7269 . 22 lb V = FUERZA. CORTANTE.
TRANSFORMACION DE ESFUERZOS
y
y
o
xy
t
xy
t
x
o
x
o
xy
t
yx
t
y
o
x
y y
x
0
x
CASOS PARTICULARES DE ESFUERZOS
I.- Tensin Pura
Dos de los crculos se han transformado en un punto.
II.- Compresin Pura
Es el mismo caso de la tensin pura, slo que con signos contrarios.
III.- Tensin Biaxial Igual
Los esfuerzos de tensin son iguales en las direcciones X y Y, y en Z = 0, Uno de los crculos se
transforma en un punto y los otros dos son iguales, no existe cortante en direccin paralela al eje
z.
IV.- Tensin Triaxial Igual
Los tres crculos se han transformado en puntos superpuestos, sin existir esfuerzo cortante en
direccin alguna. Adems el esfuerzo de tensin es el mismo en cualquier direccin. Sucedera
lo mismo para la comprensin triaxial igual.
V.- Tensin y Compresin Iguales
El crculo de Mohr se encuentra en el origen y el esfuerzo cortante mximo es igual al esfuerzo
de tensin.
VI.- Cortante Puro (Plano)
El estado de esfuerzo es igual al caso anterior. Un elemento en estas condiciones se puede
convertir a uno de tensin y compresin iguales.
VII.- Tensin Compresin Lateral
Uno de los crculos se transforma en un punto, mientras que los otros dos son iguales, y su
centro est en el origen.
TENSION UNIAXIAL
COMPRESIN UNIAXIAL
TENSIN BIAXIAL
TENSIN TRIAXIAL
TENSIN UNIAXIAL COMPRESIN BIAXIAL
CIRCULO DE MOHR
y
o
y
'
y
xy
t
xy
t
x
o
x
o
xy
t
xy
t
y
o x
x
0
Los Esfuerzos son distintos para diferentes planos inclinados.
Los ejes principales son aquellos para los que existen esfuerzos axiales y estos son mximos. En
este caso los cortantes valen cero.
0 t sen
xy
xy
t y
x
0
x
o 0
0 A
0 cos A
0
xy
t 0 0 Asen
0 t cos
xy
y
o
y
x
A
0 cos A
dy
0
0 Asen
dx
De
= 0 Fx se tiene
0 cos cos cos cos
= u u t u u t u u o u u o o Asen A sen Asen sen A A
xy xy y x x
u u t u o u o o cos 2 cos
2 2
sen sen
xy y x x
+ + =
u u u 2
2
1
cos sen sen = ;
2
2 cos 1
cos
2
u
u
+
= ;
2
2 cos 1
2
u
u
= sen
u t
u
o
u
o o 2
2
2 cos 1
2
2 cos 1
sen
xy y x x
+ |
.
|
\
|
+ |
.
|
\
| +
= .(1)
u t u
o o o o
o 2 2 cos
2 2
sen
xy
y x y x
x
+
|
|
.
|
\
|
+
|
|
.
|
\
| +
=
De
= 0 Fy tenemos
u t u
o o
t 2 cos 2
2
xy
y x
y x
sen +
= (2)
Todos los esfuerzos cortantes en las superficies del elemento se cancelan cuando el elemento se
orienta en las direcciones principales de tal forma que:
0
=
y x
t 0 2 cos 2
2
= +
u t u
o o
xy
y x
sen
Para calcular el ngulo donde se van a presentar esos valores
) 2 ( 2 cos ) 2 ( 2
2
0
u t u
o o
u
o
xy
y x
x
sen
d
d
+
|
|
.
|
\
|
= =
|
|
.
|
\
|
=
2
2
y x
xy
Tan
o o
t
u
2
2
2
xy
y x
t
o o
+
|
|
.
|
\
|
xy
t
2 / ) (
y x
o o
II
u
I
u
|
|
.
|
\
|
=
2
tan
2
1
1
y x
xy
I
o o
t
u
2
t
u u + =
I II
, es la orientacin del eje principal.
Cuando un elemento esta sometido a tensin pura los ejes x, y, z son directamente los
principales.
u 2
xy
II I
sen sen
t
u u = = 2 2
( )
2
2 cos 2 cos
y x
II I
o o
u u
= =
2
2
min , max `,
2
2
xy
y x
y x
II I x
t
o o
o o
o +
|
|
.
|
\
|
+
|
|
.
|
\
| +
=
( ) ( ) | |
=
+
|
|
.
|
\
|
+
+
+
=
2
2
2
2 2
, ,
2
2 /
2
xy
y x
xy y x y x
II I x
t
o o
t o o o o
o
2
2
, `,
2 2
xy
y x y x
II I x
t
o o o o
o +
|
|
.
|
\
|
+
= Valor mximo de la funcin
` x
o
Con esta expresin se obtienen los esfuerzos principales.
De 1` 0 t 0
o o o o
o 2 2 cos
2 2
`
sen
xy
y x y x
x
+
|
|
.
|
\
|
=
|
|
.
|
\
| +
----------------- A
Elevando al Cuadrado:
0 t 0
o o
0 t 0
o o o o
o 2 2 cos
2
2 2 2 cos
2 2
2 2 2
2
2
`
sen sen
xy
y x
xy
y x y x
x
+
|
|
.
|
\
|
+
|
|
.
|
\
|
=
(
(
|
|
.
|
\
| +
De 2: 0 t 0 0 t
o o
0
o o
t 2 cos 2 cos 2
2
2 2
2
2 2 2
2
2
` ` xy xy
y x y x
y x
sen sen +
|
|
.
|
\
|
|
|
.
|
\
|
=
Sumando miembro a miembro:
2
2
2
' `
2
`
2 2
xy
y x
y x
y x
x
t
o o
t
o o
o +
|
|
.
|
\
|
= +
(
+
a b
2
Para maximizar o maximar
` `y x
t se debe cumplir que:
0
` ` `
=
0
t
d
d
y x
( )
0 t 0
o o
2 2 2 cos
2
2 0 sen
xy
y x
=
Dividiendo entre 0 2 cos se tiene:
xy
y x
Tan
t
o o
0
2
2
=
( )
2
2
2
xy
y x
t
o o
+
|
|
.
|
\
|
|
|
.
|
\
|
=
xy
y x
Tan
t
o o
0
2
2
2
y x
o o
xy
t +
( ) | | 2 /
2
y x
sen
o o
0
= ;
xy
t
0
+
= 2 cos
Como las pendientes son reciprocas pero de signos opuestos:
Los estados de esfuerzo
max
o y
max
t estn desfasados 90
0
en el circulo de Mohr; sea en la
realidad estn desfasados 45
0
.
(
(
|
|
.
|
\
| +
+
(
(
|
|
.
|
\
|
+
|
|
.
|
\
| +
=
2
2 2
`
y x
xy
xy y x y x
x
o o
o
t o o o o
o
max
` `
=
y x
t
2
`
y x
x
o o
o
+
=
0 2
2
2
`max `
2 2
2
xy
y x
xy
xy
y x
y x
y x
t
o o
t
t
o o
o o
t
+
|
|
.
|
\
|
=
|
|
.
|
\
| +
+
(
=
( )
( )
+
|
|
.
|
\
|
(
(
+
|
|
.
|
\
|
=
2
2
2
2
2
2
2
xy
y x
xy
y x
t
o o
t
o o
2
2
`max `
2
xy
y x
y x
t
o o
t +
|
|
.
|
\
| +
=
2
2
min max, `, `
2
xy
y x
y x
t
o o
t +
|
|
.
|
\
|
=
Un esfuerzo normal acta simultneamente con el esfuerzo cortante mximo a menos que se
anule
y x
o o + .
Si
x
o y
y
o son los esfuerzos principales 0 =
xy
t
2
2 1
`max `
o o
t
=
y x
( )
2
2
` `
2
xy
y x
y x
t
o o
t +
|
|
.
|
\
|
= ,
1
o o =
x
,
2
o o =
y
, 0 =
xy
t
xy
t 45
0
F A
F
xy
t
XY
t o =
1
B
xy
t
= =
D
D
XY
t t =
2
xy
t
45
0
0 0
De la ecuacin:
2
2
`max
2 2
xy
y x y x
x
t
o o o o
o +
|
|
.
|
\
|
+
=
xy x
t o o o = =
2 1 `max
xy
o o o = =
2 1
, Tension =
1
o
Compresion =
2
o
NOTA: Siempre que un elemento esta sometido a cortante pero se puede considerar que una
diagonal esta sometida a tensin y la otra a compresin. La de tensin se llama diagonal
positiva de corte.
( )
2 2
` `
2
`
b a
y x x
= + t o que una ecuacin similar a la de un circulo.
( )
2 2 2
r y a x = +
` `y x
t
2
2
2
xy
y x
t
o o
+
|
|
.
|
\
|
x
o ( )
xy x
t o ,
y
o
` x
o
II
o
( )
xy y
t o
2
y x
a
o o +
=
2
y x
o o
I
o
Ejemplo: Trazar el circulo de Mohr dado su tensor de esfuerzos.
|
|
.
|
\
|
=
|
|
.
|
\
|
y xy
xy x
o t
t o
6 5
5 12
9
2
6 12
2
=
+
=
+
=
y x
a
o o
83 . 5 34 25 9 5 3 5
2
6 12
2
2 2 2
2
2
2
= = + = + = + |
.
|
\
|
= +
|
|
.
|
\
|
=
xy
y x
r t
o o
20
xy
t
(a,0)
3
5
tan 2
1
= 0
83 . 5
max
= t
(12,5)
3.17 14.83
(6,-5)
9
Ejemplo:
|
|
.
|
\
|
8 6
6 6
7
2
8 6
=
= a
37 6
2
8 6
2
2
= + |
.
|
\
| +
= r
08 . 6 = r
(-6,6)
-13.08 0.92
(-8,-6)
-13.08
|
|
.
|
\
|
92 . 0 0
0 08 . 13
-0.92
Para
0
45 = 0
|
|
.
|
\
|
7 08 . 6
08 . 6 7
-7
Ejemplo:
20 KSI
4 KSI
|
|
.
|
\
|
20 6
6 4
6 KSI
12
2
20 4
=
= a
100 36 64 ) 6 (
2
20 4
2
2
= + = + |
.
|
\
| +
= r
10 = r t
o
Haciendo un corte a 45
0
de la pieza
Acos45
0
` o
`
t
4
A
6
Asen45
0
20
-20 -12 -4
45
0
En estado de esfuerzos plano 0
3
= o
Si 0
2 1
= =o o
El crculo de Mohr degenera en un punto cuando se observa desde el plano 1,2
El mismo elemento observado desde el plano 1,3 2,3
0
1
= o , 0
3
= o
Se genera un crculo con radio
2
1
o
Es importante la direccin es que se considera un elemento.
2
2
o
y
1
o 1
x
z
3
o
3
y
o
F
2
dA
3
xy
t
F
1
x
o
dA
1
dA
2
F
3
ESFUERZOS EN UN ELEMENTO ESFUERZOS EN 2 DIMENSIONES
DIFERENCIAL
y
o
B
` `y x
t
0
xy
t
` x
o
x
o
C A
xy
t
HACEMOS PASAR UN PLANO, UN ANGULO 0 ATRAVS DEL ELEMENTO Y
ENCONTRAMOS LAS PROYECCIONES DE LOS ESFUERZOS EN LA RECTA AB
xy
t
x
o
` `y x
t
xy
t
xy
` t
x
` o
x
o
` x
o
0
x
o
TRANSFORMACION DE COORDENADAS ( ) ( )
xy x
` , ` , t o t o
dA
0
0
GRAFICA DEL CIRCULO DE MOHR
1 y
o
ELEMENTO DIFERENCIAL
CON ESFUERZOS CONOCIDOS
LOS CUALES SUSTITUIMOS
EN LAS FORMULAS PARA LA
a
1 1xy
t TRANSFORMACION DE
ESFUERZOS
0
1 x
o
a
1
o
a B
b
0
a
A ( ) t o,
O F C E
2
o
1
o o
b
PLANO PLANO
PRINCIPAL 2 PRINCIPAL 1
( ) 0 ,
2
o ( ) 0 ,
4
o
) , (
12 2
t o ' B T
2
o
12
t
a
PLANO CUALQUIERA
RECTA AB EN LA GRAFICA
a Y COORDENADAS EN
) , ( '
12 2
t o B
CONCLUSIONES
El estudio del crculo de Mohr resulta importante, ya que utilizarlo significa utilizar las
ecuaciones de transformacin de esfuerzos, solo que se tiene una visualizacin mas rpida.
Adems la interpretacin de los resultados viene a ser mucho ms sencilla.
El crculo de Mohr es muy til para los casos particulares en los que se trabaja con tres
dimensiones. Es tambin usado para la relacin esfuerzo-dimensin y momentos de inercia, as
como en los productos de inercia.
En general podemos concluir que el crculo de Mohr es un mtodo grafico que nos
permite conocer, de manera rpida y sencilla, el estado de esfuerzos en cualquier punto sin tener
que llegar a ecuaciones muy sofisticadas.
Quiz su aplicacin principal es que por medio de el, podemos conocer el plano donde se puede
presentar la falla y nos permite as disear el material o la seccin de manera que se garantice
completamente el comportamiento del elemento en estudio.
9.1
a)
P
2
P
1
P
1
A
P
= o ,
I
MY
= o
N P
Ib
VQ
= t
2 /
2
P
V
2 /
2
P
M
P
2
/2
P
P
P (cuestionable)
P
A C
B
A
C
B
b)
P
1
D
T
1
L/2
V P
M
T
T
P T
J
Tc
T
= t
Ib
ydA P
p
}
= t
=
2
xy
r t No hay o .
E
D
E
9.12
1000 kg/cm
2
1000 kg/cm
2
1000
max
0
0 o
max
0
0 t
9.13
1000 kg/cm
2
1000
1000
max
= o
girando 45
0
0 2
9.14
1000 kg/cm
2
400 kg/cm
2
300
2
1000 400
=
+
= a
300 1000
700
2
1000 400
2
= |
.
|
\
|
= r
0
45
max
= 0
t
0
0
max
= 0
o
9.15
280 kg/cm
2
280 kg/cm
2
140 kg/cm
2
( )
2
2 tan
y x
xy
o o
t
0
=
0 2
70
2
280 140
=
+
= a 280 70 280 420
( ) 350 280
2
280 140
2
2
= + |
.
|
\
|
= R
max
o 0 gira 26.57
0
max
t 0 gira 18.44
0
9.22
y V F
P
36.8
0
x
A
y
Esfuerzos en A
y`
2
/ 100 cm kg = t
2
/ 400 cm kg
P
= o x
x
o
53.2
0
2
/ 200 cm kg
M
= o
x`
2
/ 200 200 400 cm kg
M P x
= + = + = o o o , 0 =
y
o
2
/ 100 cm kg
xy
= t
( ) ( ) 16 . 24 2 . 53 2 100 2 . 53 2 cos
2
200
2
200
= +
= sen
S
o
( ) ( ) 69 . 67 4 . 106 cos 100 4 . 106
2
200
= +
= sen
S
t
2
/ 16 . 24 cm kg
S
= o
2
/ 69 . 67 cm kg
S
= t
9.23
y
D
A
x
B z
C
1000 kg
y
A
D
x
C z
B
2
max
420
cm
kg
M
= o
2
max
280
cm
kg
T
= t
2
max
70
cm
kg
V
= t
y
z
T
t
T
t
V
t
x
M
o
T
t
V
t
V
t
T
t z
T
t
T
t
T
t
V
t
T
t
A
M
o
C
z y
T
t
V
t
M
o x
T
o z
M
o
V
o
T
t
T
o
T
t
210
2
420
2
= =
=
y x
a
o o
( ) ( ) ( ) 350 280 210
2
2 2 2
2
= + = +
|
|
.
|
\
|
=
xy
y x
r t
o o
t
o
b) 560 350 210
max
= + = o
c) 140 350 210 = =
mun
o
d)
2
350
cm
kg
= t
B
D
r
c
9.28
|
|
|
.
|
\
|
0 0 0
0 7 . 0 0
0 0 4 . 1
Hacindolo en el crculo de Mohr
t
o
0.7
1.9
Vemos que si hay cortantes y mximos.
9.35
V=1.4
E=7X10
5
0 0
135 45
c c = , Son equivalentes y se escoge el de mayor deformacin.
( )
( ) ( ) 68 . 351 66 . 466 120 600 160 120
4
1
1 2
10 7
4
1
1 2
10 1120 120 10 7
2 2
5 6 5
= +
|
.
|
\
|
+
|
.
|
\
|
+
=
x x x
o
2
max
35 . 818
cm
kg
= o
2
min
973 . 114
cm
kg
= o
( )
2 . 0
1120 120
120 1220 600 2
2 tan =
= 0
31 . 11 2 = 0
0
65 . 5 = 0
Los esfuerzos en una placa plana en condicin de esfuerzos planos son:
PSI
x
13000 = o , PSI
y
700 = o , PSI
xy
8000 = t
Encuentre la magnitud y la orientacin de la fuerza principal o y t .
y
o
xy
t y
xy
t
` x
o
x
o
x
2
2
min max,
2 2
xy
y x y x
t
o o o o
o +
|
|
.
|
\
|
+
=
( )
2
2
8000
2
7000 13000
2
7000 13000
+ |
.
|
\
| +
=
( )
2
2
8000
2
20000
2
6000
+ |
.
|
\
|
=
( ) ( )
2 2
8000 10000 3000 + =
25 . 12866 3000 =
PSI 15806
max
= o
PSI 9806
min
= o
PSI 25 . 12806
max
= t
5
4
10000
8000
2
2 tan = =
|
|
.
|
\
|
=
y x
xy
o o
t
0
|
.
|
\
|
=
5
4
tan 2
1
0
( )
0
1
33 . 19 66 . 36
2
1
= = 0
0
2
33 . 109 = 0
xy
y x
t
o o
0
|
|
.
|
\
|
=
2
2 tan
|
.
|
\
|
=
8000
10000
tan
2
1
1
0
|
.
|
\
|
=
4
5
tan
2
1
1
0
0
67 . 25 = 0
33 . 19
1
= 0
0
-25.67
0
45
0
PROBLEMA DE TAREA
2 min
1000 o o = = PSI
3000PSI
x
o
8000PSI
RESPUESTA:
PSI
x
15000 = o
0
82 . 20 = 0
9.21
2
100
cm
kg
M
= o
Fx
2
150
cm
kg
P
= o
Fy
2
60
cm
kg
V
= t
A
0
y
y
z
z
I
z M
I
y M
A
P
= o
100 150 = o
2
50
cm
kg
A
= o x
2
60
cm
kg
= t 50 = t
60 = t
50
A
( )
2
2
min max,
2 2
xy
y x y x
t
o o o o
o +
+
=
2
2
60
2
50
2
50
+ |
.
|
\
|
=
65 25 =
|
|
.
|
\
|
0 60
60 50
60
50
-40 90
|
|
.
|
\
|
40 0
0 90
90
max
= o
40
min
= o
65 = t
2
25
y x
o o
o
+
=
0 2
9.22
Fy F
Fx
36.8 A
`
x
o Fy
8 . 36 ) 2 / ( = t 0 `
x
o
Fx
36.8
0
0
Fy
20 . 53 8 . 36
2
= =
t
0
2
100
cm
kg
V
= t
8 . 126 = 0
2
400
cm
kg
P
= o
( )
2
2 tan
y x
xy
o o
t
0
=
2
400
cm
kg
M
= o
( )
1
2
0 200
100
2 tan =
= 0
Iy
Myz
Iz
Mzy
A
P
= o 0
0 1
45 ) 1 ( tan 2 = =
0 200 200 400 = + = o
Edo de esfuerzos es:
|
|
.
|
\
|
0 100
100 200
( ) 0 t 0
o o o o
o 2 2 cos
2 2
`
sen
xy
y x y x
x
+
+
+
=
( ) ( ) 6 . 253 100 6 . 253 cos
2
200
2
200
`
sen
x
+
= o
( ) 96 . 0 100 28 100
`
+ =
x
o
28 324 96 128
`
= = =
x
o
( ) ( ) 4 . 106 100 ) 4 . 106 cos 100 128
`
sen
x
+ = o
24 96 28 100
`
= + + =
x
o
( ) ( ) 6 . 253 100 6 . 253 cos 100 100
`
sen
x
+ = o
168 96 28 100
`
= + =
x
o
Una investigacin de los esfuerzos en la placa que forma un recipiente a presin indica que el
tensor de esfuerzos es:
|
|
|
.
|
\
|
0 0 0
0 10 0
0 0 20
KSI ~
|
|
|
.
|
\
|
3
2
1
0 0
0 0
0 0
o
o
o
Cunto vale t si existe?. Haga un diagrama.
Como se trata de un tensor en tres dimensiones para poder trazar el crculo de Mohr lo
descomponemos en 3 estados de esfuerzo plano.
2
o
A)
|
|
.
|
\
|
2
1
0
0
o
o
=
|
|
.
|
\
|
10 0
0 20
1
o
15
2
2 1
=
+
=
o o
a , 5 0
2
2
2
2 1
= + |
.
|
\
| +
=
o o
r
B)
|
|
.
|
\
|
3
2
0
0
o
o
=
|
|
.
|
\
|
0 0
0 10
Localizacin del centro
5
2
3 2
=
+
=
o o
a , 5 0
2
2
2
3 2
= + |
.
|
\
| +
=
o o
r
C)
|
|
.
|
\
|
3
1
0
0
o
o
=
|
|
.
|
\
|
0 0
0 20
10
2
3 1
=
+
=
o o
a , 10 0
2
2
2
3 1
= + |
.
|
\
| +
=
o o
r
10
max
= t Plano 13
2
o
1
o
0
3
= o 5 10 15
Calcular los esfuerzos en los puntos A y B.
( ) ( )
12
6 10
3 36
12
10 6
5 36
3 3
x
P
x
P
x x
xA
= o
0 =
xz
t , ya que los cortantes en el vrtice es nulo.
( )
0
12
10 6
5 36
3
+
=
x
P
x
xB
o , por que la distancia es cero.
max =
xz
t
0 =
xy
t
|
|
|
.
|
\
|
0 0 0
0 0 0
0 0
x
o
, en A
|
|
|
.
|
\
|
0 0
0 0 0
0
2
zx
x x
t
t o
, en B
CRIETERIO DEL ESFUERZO NORMAL MAXIMO (Coulomb)
Un elemento estructural falla, cuando el esfuerzo normal mximo en aquel elemento, alcanza la
resistencia ltima
u
o .
Un elemento estructural ser tan seguro, como los valores absolutos de los esfuerzos principales
sean ambos menores que
u
o .
1
o <
u
o
2
o <
u
o
2
o
u
o
u
o
u
o
1
o
u
o
Si el punto obtenido localizando los valores de los esfuerzos principales caen dentro del rea
mostrado en la figura, el componente estructural ser seguro en caso contrario podr fallar.
CRITERIOS DE FLUENCIA PARA MATERIALES DUCTILES
El problema de deducir relaciones matemticas para predecir las condiciones a las cuales la
fluencia plstica comienza, cuando un material esta sujeto a alguna posible combinacin de
esfuerzos, es una consideracin importante en el campo de la plasticidad.
En carga uniaxial como en una prueba de tensin, el flujo plstico microscpico comenzara en
el esfuerzo de la fluencia
yp
t .
Se espera que la fluencia bajo una situacin de esfuerzos combinados pueda ser relacionada a la
misma combinacin particular de esfuerzos principales.
Existen en la actualidad formas no tericas de calcular las relaciones entre componentes de
esfuerzo y la correlacin de la fluencia para un estado tridimensional de esfuerzos con la
fluencia en una prueba de tensin uniaxial.
Los criterios de fluencia son esencialmente relaciones empricas. Sin embargo un criterio de
fluencia debe ser consistente con un nmero de observaciones experimentales, lo ms
importante de ellas es que la presin hidrosttica no causa fluencia en un slido continuo.
Como un resultado de esto, la componente hidrosttica de un estado de esfuerzos complejo no
influye en el esfuerzo al cual la fluencia ocurre.
De esta forma vemos que el esfuerzo distorsional esta involucrado con la fluencia. Aun mas
para un material isotropico, el criterio de fluencia podr ser independiente de los ejes escogidos,
es decir podr ser un invariante.
Estas consideraciones conducen a la conclusin que el criterio de fluencia podr ser alguna
funcin de los invariantes del esfuerzo distorsional.
Actualmente existen dos criterios generalmente aceptados para predecir la fluencia en
materiales dctiles.
CRITERIO DE FRACTURA PARA MATERIALES FRAGILES BAJO ESFUERZOS
PLANOS:
Los materiales frgiles se caracterizan por el hecho de que cuando estn sometidos a una prueba
de tensin, ellos pueden fallar repentinamente fracturndose sin una fluencia previa.
Cuando un elemento estructural hecho de material frgil esta bajo esfuerzo de tensin uniaxial,
el valor del esfuerzo normal que causa la falla es igual a la resistencia ultima del material,
determinada en una prueba en tensin, ya que ambos el espcimen de prueba en tensin y el
componente bajo investigacin estn sometidos al mismo estado de esfuerzos. Sin embargo
cuando un elemento estructural esta en estado de esfuerzo plano, es conveniente determinar en
primer lugar los esfuerzos principales en algn punto dado, y usar algn criterio de falla para
predecir cuando un elemento podr o no fallar.
- Criterio de Coulomb (1736-1806)
Charles Augustin de Coulomb fsico Francs
- Criterio de Mohr (Ingeniero Alemn)
- Criterio de Saint-Venant
Criterio de deformacin normal mxima
CRITERIO DEL ESFUERZO NORMAL MAXIMO (CRITERIO DE COULOMB)
Un elemento estructural falla cuando el esfuerzo normal mximo es aquel elemento
alcanza la resistencia ultima
u
o , obtenida en un ensayo de traccin en una probeta del mismo
material
Entonces el elemento estructural ser tan seguro como los esfuerzos principales
1
o y
2
o sean
ambos menores que
u
o .
u
o o <
1
;
u
o o <
2
Grficamente puede expresarse como sigue:
2
o
u
o
u
o
u
o
1
o
u
o
Si el punto obtenido dibujando los valores de
1
o y
2
o se localizan dentro del rea sombreada,
el componente estructural ser seguro, si se localiza fuera, este podr fallar.
CRITERIO DEL ESFUERZO CORTANTE MAXIMO
Esta basado en la observacin de que la fluencia en materiales dctiles es causada por
deslizamiento del material a lo largo de superficies oblicuas y es debida principalmente a
esfuerzos cortantes.
De acuerdo a este criterio un componente estructural dado, es seguro as como
max
t en aquel
componente permanezca menor que el correspondiente valor del esfuerzo cortante en un
espcimen en una prueba de tensin uniaxial del mismo material a medida que se inicie la
fluencia en el material.
Recordemos que el
max
t en un material bajo carga axial es igual a
2
max
o
, concluimos que el
mximo esfuerzo cortante es un espcimen a tensin es
yp
o t
2
1
max
=
a medida que el espcimen inicie la fluencia.
Por otro lado para esfuerzos planos:
max max
2
1
o t =
Si los esfuerzos principales son ambos positivos o ambos negativos.
Y ser
min max max
2
1
o o t = si el esfuerzo mximo es positivo y el mnimo es negativo.
Entonces si el esfuerzo principal
max
o y
min
o tienen el mismo signo, el criterio del esfuerzo
cortante mximo da,
max
o <
min
o <
yp
o
Si los esfuerzos principales
max
o y
min
o tienen signos opuestos, el criterio ser:
yp
o o o =
min max
Las relaciones obtenidas pueden representarse grficamente en la figura 6.38 es cualquier estado
de esfuerzos dado podr ser representado en aquella figura por un punto de coordenadas
max
o y
min
o , siendo estos los esfuerzos principales. Si este punto cae dentro del rea el componente
estructural es seguro, en caso contrario podr fallar como un resultado de la fluencia.
El hexgono asociado con la iniciacin de la fluencia en le material es conocido como hexgono
de Tresca.
CRITERIO DEL ESFUERZO CORTANTE MAXIMO
La fluencia ocurre cuando el mximo esfuerzo cortante alcanza el valor del esfuerzo cortante
en que una probeta o traccin comienza a fluir
El esfuerzo cortante mximo esta dado por:
2
3 1
max
o o
t
=
Donde
1
o es el esfuerzo algebraicamente mayor y
3
o el menor.
Para tensin uniaxial
u
o o =
1
; 0
3 2
= =o o
2
u
u
o
t =
2 2
3 1
max
u
u
o
t
o o
t = =
=
De esta forma el criterio del esfuerzo cortante mximo esta dado por:
3 1
o o o =
u
Para un estado de corte puro k = =
3 1
o o ; 0
2
= o
El criterio del esfuerzo cortante mximo predice que la fluencia podr ocurrir cuando:
u
k o o o = = 2
3 1
2
u
k
o
=
Notamos que el criterio del esfuerzo cortante mximo es menos complicado matemticamente
que le de Von Mises y por esta razn es frecuentemente usado en diseos de ingeniera.
y
o
2
y x
o o +
2 2
y x x y
o o o o
=
x
o
= +
xy
t
xy
t
2
y x
o o +
2
y x
o o
Esfuerzo Total = Esfuerzo Hidrostatico + Esfuerzo Distorsional
Esfuerzo Hidrostatico =
3 3
3 2 1
o o o
o o o
o
+ +
=
+ +
=
z y x
m
Esfuerzo Distorsional =
ij m ij ij
t o o o =
,
Siendo
j i
j i
ij
=
=
=
|
|
|
.
|
\
|
=
, 0
, 1
1 0 0
0 1 0
0 0 1
t delta de Kronecker=
ij
t
|
|
|
.
|
\
|
=
(
(
(
=
z zy zx
yz y yz
xz xy x
ij
o t t
t o t
t t o
o o o
o o o
o o o
o
33 23 13
23 22 12
13 12 11
|
|
|
|
|
|
|
.
|
\
|
=
3
2
3
2
3
2
,
y x z
zy zx
yz
z x y
yz
xz xy
z y x
ij
o o o
t t
t
o o o
t
t t
o o o
o
El tensor distorsional involucra esfuerzos cortantes ya que
,
ij
o es un tensor de 2
0
rango, tiene
ejes principales. Los valores principales de el esfuerzo distorsional son las races de la ecuacin
cbica ( ) ( ) 0
3
,
2
2
,
1
3
,
= J J J o o o .
2 1
, J J y
3
J son los invariantes del tensor de esfuerzo distorsional.
( ) ( ) ( )
m z m y m x
J o o o o o o + + =
1
, o sea la suma de los trminos de la diagonal principal.
:
2
J la suma de los menores principales de
,
ij
o
, , , , , , 2 2 2
2 x z z y y x zx yz xy
J o o o o o o t t t + + =
( ) ( ) ( ) ( ) | |
2 2 2 2 2 2
2
6
6
1
xz yz xy x z z y y x
J t t t o o o o o o + + + + + =
3
J es el determinante de
,
ij
o
Refiriendo
,
ij
o a un sistema de ejes principales.
( ) ( )
3 3
2
3 1 2 1 3 2 1
,
1
o o o o o o o
o
+
=
=
( )
2 3
3 1 2 1
,
1
3
2
2 2 3
2
t t
o o o o
o + = |
.
|
\
|
+
=
Donde
2
t y
3
t son los esfuerzos cortantes principales.
Adems, ( ) ( ) ( ) | |
2
1 3
2
3 2
2
2 1 2
6
1
o o o o o o + + = J
CRITERIO DE LA ENERGIA DISTORSIONAL (von Mises)
La fluencia ocurre cuando el segundo invariante del esfuerzo distorsional
2
J excede algn valor
critico.
2
2
k = J
Donde ( ) ( ) ( ) | |
2
1 3
2
3 2
2
2 1 2
6
1
o o o o o o + + = J _________________ (1)
En tensin uniaxial
yp
o o =
1
0
3 2
= =o o
Al sustituir estos valores en
2
J
( )
2 2 2
2
6
1
k o o = + =
yp yp
J
O bien k o 3 =
yp
__________________________ (2)
Sustituyendo (2) en (1) se llega a:
( ) ( ) ( ) | |
2
1
2
1 3
2
3 2
2
2 1
2
1
o o o o o o o + + =
yp
___________ (3)
L ecuacin (3) nos indica que la fluencia puede ocurrir cuando el lado derecho de la igualdad
exceda al esfuerzo
yp
o obtenido en tensin uniaxial.
En corte puro (TORSION) se tiene:
max 3 1
t o o = = 0
2
= o
Sustituyendo en (3)
2 2
1
2
1
2
1
6 4 k o o o = + +
De donde k o =
1
(k representa el esfuerzo de fluencia)
Este criterio predice que el esfuerzo de fluencia en torsin ser menor que en tensin uniaxial de
acuerdo
yp yp
o o k 577 . 0
3
1
= =
Resumiendo note que el criterio de fluencia de von Mises implica que la fluencia no depende
solamente de algn esfuerzo normal o cortante en particular, sin embargo en lugar de eso, la
fluencia depende de una funcin de todos los tres valores de los esfuerzos cortantes principales.
Puesto que el criterio de fluencia de von Mises esta basado en diferencias de los esfuerzos
normales
2 1
o o , etc. el criterio es independiente de la componente hidrosttica de esfuerzo.
Ya que el criterio de fluencia de von Mises involucra trminos al cuadrado, el resultado es
independiente del signo de los esfuerzos individuales. Esto es una importante ventaja ya que no
es necesario conocer cual es el mayor o menor esfuerzo principal para usar este criterio debido a
la simplicidad matemtica.
Hencky (1924) mostr que la ecuacin
( ) ( ) ( ) ( )
2
1
2
1 3
2
3 2
2
2 1
2
1
o o o o o o o + + =
yp
Era equivalente a considerar que la fluencia ocurre cuando la energa de distorsin alcanza un
valor crtico. La energa de distorsin es aquella parte de la energa total de deformacin por
unidad de volumen que esta involucrada en cambiar de forma, asi como oponerse a un cambio
en volumen.
El hecho que la energa total de deformacin pueda ser dividida en un termino segn en cambio
de volumen y un termino segn de distorsin.
CRITERIO DEL ESFUERZO CORTANTE MAXIMO
La fluencia ocurre cuando el esfuerzo cortante mximo en un material, alcanza el valor del
esfuerzo cortante en una prueba de tensin uniaxial.
2
3 1
max
o o
t
= ___________________ (A)
1
o Es el esfuerzo principal algebraicamente mayor.
3
o Es el esfuerzo principal algebraicamente menor.
Adems para tensin uniaxial
yp
o o =
1
0
3 2
= =o o
El esfuerzo cortante de fluencia es
2
yp
yp
o
t =
Sustituyendo las condiciones anteriores en A
2 2
3 1
max
y
yp
o
t
o o
t = =
=
De donde,
3 1
o o o =
yp
CRITERIO DEL ESFUERZO CORTANTE MAXIMO
Para un estado de corte puro (TORSION)
k o o = =
3 1
. 0
2
= o
El criterio del esfuerzo cortante mximo predice que la fluencia podr ocurrir cuando
yp
o k o o = = 2
3 1
, o cuando
2
yp
o
k =
O de otra forma k o o o o 2
,
3
,
1 3 1
= =
Puede notarse que el criterio del esfuerzo cortante es menos complicado matemticamente de
von Mises y por esta razn es frecuentemente usado en diseos de ingeniera. Sin embargo el
criterio del esfuerzo cortante mximo no toma en consideracin al esfuerzo principal
intermedio. Sufre de mayor dificultad ya que requiere conocer anticipadamente cuales son los
valores de los esfuerzos principales mximo y mnimo. Aun mas, la forma general del criterio
del esfuerzo cortante mximo es mas complicada que la del criterio de von Mises es preferido
en muchos trabajos tericos.
CRITERIO DEL ESFUERZO CORTANTE MAXIMO
0 64 96 36 27 4
6
2
4 2
2
2 2
3
3
2
= + k k k J J J J ,
PRUEBAS DE ESFUERZOS COMBINADOS
Las condiciones para fluencia para un elemento bajo un estado de esfuerzos, no solo sometido a
torsin o a la accin de una carga axial, pueden ser convenientemente estudiadas con tubos de
pared delgada. Los esfuerzos axiales pueden ser combinados con los de torsin para producir
varias combinaciones de esfuerzo normal y cortante intermedios entre los valores obtenidos
separadamente en torsin y tensin.
Alternativamente puede introducirse una presin hidrosttica para producir un esfuerzo
tangencial circunferencial en el tubo.
y
x
o
xy
t
x
o
P P x
Para el estado de esfuerzos mostrado en la figura, al aplicar las expresiones de circulo de Mohr
se tiene:
2
1
2
2
1
4 2
|
|
.
|
\
|
+ + =
xy
x x
t
o o
o
0
2
= o
2
1
2
2
3
4 2
|
|
.
|
\
|
+ =
xy
x x
t
o o
o
Aplicando el criterio del esfuerzo cortante mximo
0 3 1
o o o =
Se llega a: 1 4
2
0
2
0
=
|
|
.
|
\
|
+
|
|
.
|
\
|
o
t
o
o
xy
x
_______________________ (I)
Con los esfuerzos principales sustituidos en el criterio de energa de distorsin
( ) ( ) ( ) | |
2
1
2
1 3
2
3 2
2
2 1 0
2
1
o o o o o o o + + =
Se tiene: 1 3
2
0
2
0
=
|
|
.
|
\
|
+
|
|
.
|
\
|
o
t
o
o
xy
x
___________________ (II)
Las ecuaciones (I) y (II) definen una elipse.
yp
xy
o
t
Energa de distorsin
0,6
0,5
0,4
0,3
0,2
0,1
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Esfuerzo Cortante mximo
yp
x
o
o
Comparacin entre las teoras de esfuerzo cortante mximo y de energa de distorsin
(von Mises)
La figura anterior muestra que los resultados experimentales estn mas de acuerdo con la teora
de energa de distorsin.
Para condiciones de esfuerzos planos, la teora de energa de distorsin y fluencia puede ser
expresada matemticamente como:
2
2 1
2
2
2
1 yp
o o o o o = +
Esta es la ecuacin de una elipse cuyo semieje mayor es
yp
o 2 y cuyo eje menor es
yp
o
3
2
.
Una forma conveniente de comprara los criterios de fluencia para un estado bidimensional de
esfuerzos, es mediante un dibujo que nos represente el mismo campo de esfuerzos biaxiales
balanceados ( )
2 1
o o = .
2
o
yp
o
VON MISES
yp
o 2
yp
o
1
o
yp
o 3 2
TRESCA
COMPARACION DE CRITERIOS DE FLUENCIA
La mayor divergencia entre las dos teoras ocurre para un estado de corte puro ( )
2 1
o o = .
Von Mises predice un corte puro 3
yp
o k = , mientras que para el criterio del esfuerzo
cortante mximo 2
yp
o k = .
El criterio de von Mises es 155 . 1
3
2
= mayor que el esfuerzo de fluencia predicho por el
criterio del esfuerzo cortante mximo.
EJEMPLO
40 MPa
25 MPa
80 MPa
De una prueba de tensin MPa
yp
250 = o , ? . . = S F , con respecto a la fluencia.
Usando el criterio de
a) esfuerzo cortante mximo
b) energa de distorsin mxima
1 Trazar el crculo de Mohr.
2
2
min max,
2 2
xy
y x y x
t
o o o o
o +
|
|
.
|
\
|
+
=
MPa
I
85 = o , 0 =
II
o , MPa
III
45 = o
MPa 65
max
= t , MPa
promedio
20 = o
a)
2
yp
yp
o
t = = MPa 125
Adems 92 . 1
65
125
. .
max
= = =
t
t
yp
S F
b) ( ) ( ) ( ) ( )
2
1
2
1 3
2
3 2
2
2 1
2
1
o o o o o o o + + =
yp
( )
2
1
2 2 2
120 45 85 + + =
yp
o
10.10
d=5 cm P=8 Ton
T=?
2
560
cm
kg
perm
= t
T
Nota: Las flechas se fabrican de material dctil generalmente.
2
max ,
yp
xy
o
t =
yp
o Dctil
yp
o o =
max
u
o
u
o o =
max
Frgil
0 =
xy
t no resisten esfuerzo cortante
Se analizara para materiales dctiles se analizara por cortante:
2
2
2
xy
y x
per
t
o o
t +
|
|
.
|
\
|
=
2
2
44 . 407
25 14 . 3
32000
4
5
8000
cm
kg
X A
P
x
= = = =
t
o
J
Td
J
Tc
2
= =t , obsrvese que se da
2
d
c = ya que se pide el mximo y en el extremo o periferie
se ampli.
( )
T
T T
d
T
d
Td
04074 . 0
125
16
5
16 16
32
2
3 3 4
= = = = =
t
t t t
t
( ) ( ) ( )
2 3 2 2 2
2
10 66 . 1 72 . 203 560 04074 . 0
2
44 . 407
560 T x T
+ = + |
.
|
\
|
=
( ) ( )
cm kg
x
T * 91 . 12802
10 66 . 1
72 . 203 560
3
2 2
=
=
CRITERIO DE ENERGIA DISTORSIONAL O DE VON MISES
Von Mises (1913) propuso que la fluencia podra ocurrir cuando el segundo invariante del
esfuerzo distorsional
2
J excediera algn valor critico.
2
2
k = J ____________________ (a)
Donde: ( ) ( ) ( ) | |
2
1 3
2
3 2
2
2 1 2
6
1
o o o o o o + + = J
Para valuar la constante k y relacionarla a la prueba de tensin, (realizaremos) aceptaremos que
en la fluencia en una prueba de tensin.
yp
o o =
1
0
3 2
= =o o
Sustituyendo estos valores en
2
J se tiene:
( ) ( ) ( ) | |
2 2 2
2
0 0 0 0
6
1
yp yp
J o o + + =
( )
2 2 2
2
6
1
k o o = + =
yp yp
J
2 2
6 2 k o =
yp
k o 3 =
yp
2
2
3
|
|
.
|
\
|
=
yp
o
k
Sustituyendo esta expresin en (a) obtenemos
( ) ( ) ( ) | |
2
1 3
2
3 2
2
2 1
2
6
1
3
o o o o o o
o
+ + =
yp
( ) ( ) ( ) | |
2
1 3
2
3 2
2
2 1
2
2
1
o o o o o o o + + =
yp
( ) ( ) ( ) | |
2
1
2
1 3
2
3 2
2
2 1
2
1
o o o o o o o + + =
yp
Las ecuaciones anteriores predicen que la fluencia puede ocurrir cuando la diferencia de
esfuerzos en el lado derecho de la ecuacin excede al esfuerzo de fluencia
yp
o en tensin
uniaxial. Para identificar la constante k en la ecuacin ( )
2
2
k = J considrese el estado de
esfuerzos en corte puro como el producido en una prueba de torsin, en donde:
t o o = =
3 1
0
2
= o
Que sustituidos en la ecuacin de fluencia:
2 2
1
2
1
2
1
6 4 k o o o = + +
De donde resulta que: k o =
1
De modo que k representa el esfuerzo de fluencia en corte puro (Torsin). De esta forma el
criterio de Von Mises predice que el esfuerzo de fluencia en torsin ser menor que en tensin
uniaxial de acuerdo a:
yp yp
o o k 577 . 0
3
1
= =
TEORIA DE FALLA DE TRESCA
Tresca dice Los materiales fallan al alcanzarse
max
t
max
t
o
max
t
1.0
-1.0
1.0
-1.0
2
f
T
o
t =
3
f
v
o
t =
TEORIA DE FALLA
Energa de distorsin mxima
| |
yz yz y y x x
vol
U
d
dU
t c o c o + + + = = ...
2
1
0
|
|
|
.
|
\
|
z zy zx
yz y yx
xz xy x
o t t
t o t
t t o
|
|
|
.
|
\
|
z
y
x
o
o
o
TENSOR DE ESFUERZOS PRINCIPALES ___ (A)
Tambin
| | | |
1 3 3 2 2 1
2
3
2
2
2
1 0
2
1
o o o o o o
v
o o o + + + + = =
E E
U
dVol
dU
TOTAL
Utilizando el principio de superposicin
Tensor esfrico dilatacional Tensor
|
|
|
|
.
|
\
|
o
o
o
+
( )
( )
( )
|
|
|
|
.
|
\
|
o o
o o
o o
3
2
1
dislorsionante
Volumtrico Hidrosttico deviatorico
2
o o ( ) o o
2
1
o o ( ) o o
1
= +
3
o o ( ) o o
3
3
1
o
3
1
o
3
1
o
= + +
3
1
o
3
1
o
3
1
o
3
1
o
3
1
o
3
1
o
CAMBIAR VOLUMETRICAMENTE
Calcular la energa dilatacional
( ) v
o
v
o
o
v o
2 1
2
3
2
1 3 3
2
3
2 2
2
2
0
= |
.
|
\
|
= =
E E E E
U
al dilatacion
Se haba mencionado que:
3
3 2 1
o o o
o
+ +
=
( )( ) ( )( )
E E x
U
al dilatacion
6
2 1
2 9
2 1 3
2
3 2 1
2
3 2 1
0
o o o v o o o v + +
=
+ +
=
| | | | ( )
2
3 2 1 1 3 3 2 2 1
2
3
2
2
2
1 0
6
2 1
2
1
o o o
v
o o o o o o
v
o o o + +
+ + + + =
E E E
U
distorsion
( ) v
=
1 2
E
G
( ) ( ) ( ) | |
2
1 3
2
3 2
2
2 1 0
12
1
o o o o o o =
G
U
dist
Probeta unidimensional
G
U
fluencia
12
2
2
0
o
=
y
o o =
1
Igualando energas distorsionantes
( ) ( ) ( ) fluencia
2 2
1 3
2
3 2
2
2 1
2o o o o o o o = + +
0
1
= o , 0
2
= o ; 0
3
= o Esfuerzos planos
( )
2 1
2
2
2
1
2 2
1 2
2
2 1
2 2 2 2 o o o o o o o o o + = = + + fluencia
1
2
2
2
2 1
2
1
=
|
|
.
|
\
|
+
|
|
.
|
\
|
|
|
.
|
\
|
f
f
f
o
o
o
o o
o
o
Es una ecuacin de una elipse.
Teora de Von Mises
Huber-Henky-Mises.
2
o
(1,0) (1,1)
(-1,0)
1
o
(1,0)
(-1,-1) (0,-1)
Ejemplo: Cual es el
max v
t y en que plano acta. Si esta fluyendo. Hacer un diagrama.
2
o
|
|
|
.
|
\
|
8000
6000
12000
1
o
3
o
2
o
1
o
3000
2
6000 12000
2
2 1
=
=
+
=
o o
a
0
9000
2
6000 12000
2
2
2
2 1
=
+
= + |
.
|
\
|
=
xy
R o
o o
1000
2
8000 6000
2
3 2
=
+
=
+
=
o o
a
7000
2
8000 6000
2
2 2
3 2
= |
.
|
\
|
= |
.
|
\
|
=
o o
R
10000
2
8000 12000
2
3 1
=
+
=
+
=
o o
a
2000
2
8000 12000
2
2 2
3 1
= |
.
|
\
|
= |
.
|
\
| +
=
o o
R
0 2
Ejemplo: En un recipiente a presin se encontr que el tensor era
|
|
|
.
|
\
|
0
10
20
, encontrar los
estados de esfuerzos mximos y hacer diagrama.
15
2
10 20
1
=
+
= a
o
5
2
10 20
2
1
= |
.
|
\
|
= R
10
5
2
0 10
2
=
+
= a
5
2
0 10
2
2
= |
.
|
\
|
= R 10 20 o
10
2
0 20
3
=
+
= a
10
2
20
2
3
= |
.
|
\
|
= R
10
max
= t
Angulo 45
0
Plano
3 1
,o o
Ejemplo: Cilindro de concreto probndolo y falla a
2
400
cm
lb
, la falla se presento en un plano
a
0
30 respecto la vertical. Cuales son los esfuerzos que actuaron en el cuerpo en el momento
de la falla?
4000 4000
|
|
.
|
\
|
4000 0
0 0
30
0
60
0
(-3000,1710)
3000
2000
2
3
2000
1710
1000
Ejemplo:
8`
2``
6``
9
2P
= o
3
x
o
3
2
36
) 3 ( 8 P P
y
I
M
x
= = =o
9
2
36
) 1 ( 8 P P
= = o
|
|
.
|
\
|
0
9
9 9
2
P
P P
u 2
2` A
30
9 ) 2 ( 36
) 8 ( P P
= = t
9
2P
8 ) 1 ( 8 = = Q
9
P
F
M 8P
FV P
9 2
9
0 2
P
P
a =
=
2 2
9 9 * 2
0 2
|
.
|
\
|
+ |
.
|
\
|
=
P P
R
P P
P P
R
9
2
81
2
81 81
2 2
= = + =
120
9
2
max
= = P t
2
1080
= P
(-2/9P, ) 9 / 2
(-2/9P,1/9P)
Ejemplo:
100`` 2 4k
1
2k 2
125`` z -4k
F=6k
y
x
k F j F i F K F
z y x
+ = = 6
3 9 2 1 2
2 2 2
= = + +
P
9
1
u 2
z
o
4 6
3
2
= = i F
x
zy
t
zx
t
2 6
3
1
= = j F
y
4 6
3
2
= = k F
z
4 =
A
N
2 =
y
V
4 =
x
V
200 100 2 = = x M
T
250 125 2 = = x M
Fx
900 ) 125 4 ( ) 100 4 ( = + = x x M
y
F
CALCULO DE DESPLAZAMIENTOS
DEFLEXIONES EN VIGAS
M y M
s A x
y
x A u A
0 A
s
y
s
u
s s
A
A
=
A
A
A A
0
0 0
lim lim
|
.
|
\
|
=
ds
d
y
ds
du 0
,
1
= k
c
y
yk
x
= =
K=curvatura
Se sabe que:
2
3
2
2
2
1
1
(
(
|
.
|
\
|
+
=
dx
dv
dx
v d
Para deformaciones pequeas:
2
2
1
dx
v d
~
y
x
c
=
1
y dx
v d
x
c
= ~
2
2
1
E
x
x
o
c = ( ) 0 = =
z y
o o
Y como sabemos que y
I
M
z
x
2
= o
2
2
1
dx
v d
EI
M
= =
Es una ecuacin diferencial que se puede resolver
Sea: v = desplaz. (y) = elastico
0 = =
dx
dv
v
`
= Pendiente a la elastica
EI
dx
v d
M
2
2
= = Momento proporcional a la curvatura
EI
dx
v d
EI
dx
v d
dx
d
dx
dM
V
3
3
2
2
=
|
|
.
|
\
|
= =
SI EI=cte.
Para la solucin de problemas se opera en sentido opuesto o sea integrando.
|
|
.
|
\
|
= = = EI
dx
v d
dx
d
dx
M d
dx
dv
A P
2
2
2
2
2
2
) ( EI
dx
v d
4
4
Si partimos de la ecuacin anterior tendremos:
( )dx x dx
dx
v d
EI
} }
=
4
4
( )
1
0
3
3
C dx x
dx
v d
EI
x
+ =
}
( )
2 1
0 0
2
2
C x C dx dx x
dx
v d
EI
x x
+ +
(
=
} }
( )
3 2
2
1
0 0 0
2
C x C
x C
dx dx dx x
dx
dv
EI
x x x
+ + +
)
`
=
} } }
( )
4 3
2
2
0
3
1
0 0 0
2 6
C x C
x C x C
dx dx dx dx x EIv
x x x x
+ + + +
)
`
=
} } } }
( )
4 3
0
2
2
0 0
3
1
0
2 6
1
C x C
x C x C
dxdxdxdx x
EI
v
x x x x
+ + + + =
} } } }
Existe otra manera de calcular el valor de v y consiste en que si se conoce el valor de la
ecuacin del momento se sigue la siguiente secuencia
( )dx x M dx
dx
v d
EI
} }
=
2
2
( )
3
0
C dx x M
dx
dv
EI
x
+ =
}
( )
} }
+ + =
x x
C x C dxdx x M
EI
v
0
4 3
0
1
CONDICIONES DE FRONTERA (PARA CALCULAR EL VALOR DE CTES)
(PROBLEMA DE VALORES EN LA FRONTERA)
SISTEMAS DE APOYO
a) Empotramiento
y
0
0
=
= x
v ; 0
0 0
= =
= = x x
dx
dv
0
b) Apoyo Simple (Articulado)
0
x
0
0
=
= x
v ; 0
0
2
2
=
= x
dx
v d
3
3
dx
v d
EI
dx
dM
V = =
c) Libre
x
0
0
2
2
=
= x
dx
v d
0
0
3
3
=
= x
dx
v d
d)
0
0 0
= =
= = x x
dx
dv
0 0
0
3
3
=
= x
dx
v d
Ejemplo:
M
( ) 0 0 = v ( )
1
``
M L v M = = ( )
EI
M
L v
1 ``
=
( ) 0 0
`
= v ( ) 0
```
= = L v V
Se cuenta con la ecuacin ( ) P EIv
IV
=
( ) 0 = x P
( )
4 3
2
2
3
1
2 6
1
C x C
x C x C
dxdxdxdx x P
EI
v + + + + =
} } } }
4 3
2
2
3
1
2 6
C x C
x C x C
v + + + =
De las condiciones del problema
( )
4
0 0 C v = =
Derivando v ; x C
x C
v
2
2
1 `
2
+ = , pero ( )
3
`
0 0 C v = =
2 1
``
C x C v + =
( )
2 1
1 ``
C L C
EI
M
L v + = =
( )
1
```
C L v =
( )
1
```
0 0 C v = =
2
2
1
x
EI
M
v = , cumpliendo con esto las condiciones de frontera.
Puede resolverse sabiendo que el diagrama de momentos es:
d. M.
Entonces partimos de la ecuacin
4 3
1
C x C Mdxdx
EI
v + + =
} }
4 3
2
1
2
C x C
x
EI
M
v + + = , para ( ) 0 0 = v 0
4
= C
para ( ) 0 0
`
= v 0
3
= C
Con lo que nos queda que:
2
2
1
x
EI
M
v =
y
a b
x
L
( ) 0 0 = v ( ) 0 = L v
( ) ( ) 0 0 0
``
= = v M ( ) ( ) 0
``
= = L v L M
( ) 0 = x P
) ( a , 0
) ( L a, , Como no se puede integrar directamente, hacemos el diagrama de momentos.
P
L
Pb
L
Pa
( ) a , 0 ( ) x
L
Pb
x M =
( ) L a, ( ) ( ) x L
L
Pa
x M =
4 3
0 0
1
C x C Mdxdx
EI
v
x x
+ + =
} }
En ( ) a , 0 ,
4 3
0 0
C x C xdxdx
EIL
Pb
v
x x
+ + =
} }
0
4 3
3
6
C x C
x
EIL
Pb
v + + = de las condiciones
0
En ( ) L a. , ( )
4 3
3 2
4 3
0 0
6 2
C x C
x Lx
EIL
Pa
C x C dxdx x L
EIL
Pa
v
x x
+ +
(
= + + =
} }
Para ( ) 0 = L v L C
L L
EIL
Pa
3
3 3
6 2
+
(
( ) L C
EI
PaL
L v
3
2
3
0 + = = ,
EI
PaL
C
3
3
=
( ) a , 0 x
EI
PaL x
EIL
Pb
v
3 6
3
=
( ) L a, x
EI
PaL x Lx
EIL
Pa
v
3 3 2
3 2
=
A B
x A ( ) x x M A
EI
My
dx
du
dx
d
y
x
= = = c
0
EI
M
dx
d
=
0
dx
EI
M
d
} }
= 0
}
= Mdx
EI
A B
1
0 0
y
EI
M
d = 0
PL/4
rea Rayada =
EI
L PL 1
2
1
2 4
0
2
L
x
L x
=
=
0 0
EI
PL
L x
16
2
=
=
0
elastica
A B
AB
t
BA
t
EI
M
EI
M
EI
PL
16
2
EI
PL
16
2
EI
PL
16
2
EI
PL
48
3
TEOREMAS DE MOHR
Calculo de deflexiones en vigas.
0
( )
dx
d
dx
dv
dx
d
EI
x M
dx
v d 0
= |
.
|
\
|
= =
2
2
( ) x P
dx
v d
EI
dx
d
=
|
|
.
|
\
|
2
2
2
2
( ) x P
dx
v d
=
4
4
EI
M
A dx B x
x Elstica
0 d
x d dt
A
0 =
0 d
dt
A`
0
dx dt
x
0 d 0 d 0 0 d +
A B
A
0 d x dx
EI
M
dt |
.
|
\
|
=
0 d dt
BA
dx
EI
M
B
A
A B
}
+ =0 0 , Primer Teorema de Mohr
| 0 x dxx
EI
M
x d t
B
A
AB
= = =
} }
, Segundo Teorema de Mohr
dA Conjugado
dx
EI
M
d = |
}
=
B
A
dx
EI
M
|
Ejemplo: Encuentre la pendiente y la deformacin en el extremo libre
1000 #
C B
A D
BA
t
6`` 6`` 4``
4
1
sin = I
4
2
1in I =
M
) 13 ( 2 x
12000 #-lb ) 14 ( 3 x
) 8 ( 1 x
2400 1200
EI
M
(
(
=
in
in
m
in 1
#
#
4
2
6000
10800
2
1200 2400
=
+
/8000 A conjugada=adimensional (rad)
Aplicando dx
EI
M
B
A
A B
}
+ =0 0
rad X
E
B
3
10 88 . 2
28800
0
= + = 0
7
10 =
al
E
( )
7
10
1
3600 74 7200 13 18000 8 X X X X t
BA
+ + = = |
VIGA CONJUGADA
Ejemplo:
P ,
A a 3a B
3P/4 3Pa/4 P/4
2Pa/4
`
C
C
1
C
CB
t
AB
t
EI
a
Pa a
EI
Pa a X t
AB
1
2
3
4
3
2
1
4
3
3
2
+ = = |
EI
a
Pa a t
CB
1
2
2
4
2
3
2
=
CB
AB
t
t
= A
2
,
CB
AB
t
t
C C C C = = A
2
`` ` ``
,
Ejemplo:
1
R
2
R
EI
wL
2
2
A
EI
RL
x
0
3
2
2 4
3
3
1
2
2
= |
.
|
\
|
|
.
|
\
|
= A L
L
EI
RL
L L
EI
wL
Ejemplo:
01
A
02
A
21 11 01 1
0 A A A = = A
1
R
11
A
12
A
22 12 02 2
0 A A A = = A
2
R
1
R
21
A
22
A
2
R
Ejemplo:
1
R
2
R
2
1
1in A =
2
2
2in A = ksi
y
60 = o
``
30 = a `` 20 = b ksi X E
3
10 30 =
1) P R R = +
2 1
) (P f =
AE
PL
c
=
2)
E A
b R
E A
a R
2
2
1
1
=
De la ecuacin 2 tenemos:
( )
( )
( )
( )E
R
E
R
2
20
1
30
2 1
=
1 2
3R R =
4
1
P
R = y P R
4
3
2
=
( ) 4 1 4
1
1
P P
= = o P
P
8
3
2 4
3
2
= = o
Si 60
2
= o kips P 160 =
P
180
160
0.04 0.06
`` 04 . 0
10 30
160 30
4
3 30
3
1
= = =
X
X
EI
R
Para que 20 40 60
4 1
+ = =o o
20
1
20
1
=
A
= = A
P
o
02 . 0
1 10 30
30 20
3
1
= = A
X X
X
06 . 0 02 . 0 04 . 0 = + =
co todoplasti
Calculo de la Elstica
Cerradas
Sol
n
aprox. Truncas
Procesos de matemticas
Dif finitas
Mtodos Numricos Elementos finitos
Integracin numrica
y
x
z
|
|
|
.
|
\
|
z zy zx
yz y yx
xz xy x
o t t
t o t
t t o
adems
|
|
|
|
|
.
|
\
|
z xz xz
yz y xy
x
c
c
c
2 2
2 2
v
u
w
dx
x
c
Para sistemas Conservativos
dx dydz
x x
c o
dV dv
x x
= c o ;
dv
dU
x x
= c o Densidad de energa por unidad de volumen
| |
yz yz xz xz xy xy z z y y x x
U
dv
dU
t t t c o c o c o + + + + + = =
2
1
0
dA o
ds f dw
0
=
x
o
Ex
Trabajo
Ejemplo:
25K
Acero
2
2in A=
psi X E
s
6
10 30 =
0.0025
15 Cobre
2
3in A=
psi X E
CU
6
10 17 =
( ) ( ) 3 2 25
CU S CU S
k
P P o o + = + =
0025 . 0 + =
C S
|
.
|
\
|
= =
E
L
E
L
A
P
o
( ) ( )
0025 . 0
10 17
15
10 30
0025 . 15
6 6
+ =
X X
CU S
o o
2500 3 2 = +
CU S
o o
25 R
SR
ST
C SR ST fS
= =
| |dv dU U
xz xz x x v
} }
+ = = t c o ....
2
1
Para vigas (Teora de vigas)
|
|
|
.
|
\
|
0 0 0
0 0
0
yx
xy x
t
t o
( )
}
+ = dv U
xy xy x x vol
t c o
2
1
Si es elstico lineal
G E
xy
xy
x
x
t
o
c = = =
dv
G E
U
xy
x
vol
}
|
|
.
|
\
|
+ =
t
o
2
2
1
} }
+ = dv
G
d
E
U
xy
vol
x
vol
t
o
o
2
1
2
1
2
x
o = fuerza normal =
A
N
x
o en flexin = y
I
M
------------------ A
}
|
.
|
\
|
= dv
E A
N
U
vol axial
1
2
1
2
Adx d
vol
= Seccin cte A
} }
= =
L L
axial
dx
AE
N
dx
E A
N A
U
0
2
0
2
2
2
1
2
Tomando A se tiene:
| | = = = = =
} } } } }
dx M dA y
EI
dAdx
E
y
I
M
dAdx
E
y
I
M
dvol
E
y
I
M
U
vol vol
flexion
2 2
2
2
2
2 2
2
2 2
2
2
1
2
1
2
1
2
1
2
1
dx M
EI
U
L
flexion
2
0
2
1
}
=
Para torsin en flechas. r
J
M
T
= t
( ) dx
JG
M
dx dA r
G J
M
dvol
G
r
J
M
U
L
T
A
L
T
vol
T
torsion
} } } }
= = =
0
2
0
2
2
2
2
2 2 2
1
Para cortante por flexin.
It
VQ
= t
} }
= =
L
vol
te cor
dvol
t I
Q V
G
U
0
2 2
2 2
tan
1
2
1
te cor torsion flexion normal TOTAL
U U U U U
tan
+ + + =
x
o
Sabemos que si un sistema esta en equilibrio.
0 = W o
cte
0
int
= +
externo erno i
W W
Ejemplo:
A
2
A
=
P
W
A =
AE
L P
dx
AE
N
U
L
2 2
2
0
2
= =
}
P 0
2 2
2
=
A
AE
L P P
AE
PL
= A
Ejemplo:
0
2
0
T
e
M
w =
L
GJ
M
dx
GJ
M
U w
T
L
T
i
2 2
2
0
2
= = =
}
0
2 2
2
=
GJ
L M M
T T
0
GJ
L M
T
= 0
Ejemplo: Encontrar la deformacin mxima debido a una carga aplicada como se muestra.
P b
h
L
2
A
=
P
w
e
( ) x L P M =
( )
( )
(
+ = = =
} }
3
1
2
2
1
2 2 2
3 2
0
2
2
0
2
EI
L P
dx x L
EI
P
dx
EI
x M
U
L L
f
EI
L P
U
f
6
3 2
=
Tomando la siguiente seccin se tiene:
b
i
A
2
h
}
=
i
A
ydA Q
(
= = =
}
2
2
2
2
2
4 2 2
y
h b y
b ydy b Q
h
y
h
y
dydx y
h
b
b GI
V b
dvol
b GI
Q V
U
L
h
h
vol
v
} } }
(
= =
0
2
2
2
2
2
2 2
2 2
2 2
2 2
4 8 2
Tomando la Integral =
(
+ =
(
}
2
2
5 3 2 4
2
2
4 2
2 4
5 3 2 16 4
2
16
h
h
h
h
y y h
y
h
dy y y
h h
30 10
1
3
1
2
1
8
2
160
1
48
1
32
1
2
5
5 5
h
h h =
(
+ =
(
+ =
Sustituyendo en
v
U
30 8 30 8
5
2
2 5
0
2
2
h
GI
Lb P
dx
h
GI
V b
U
L
v
= =
}
, y como
12
3
bh
I =
( )
6 2
5 2
2
3
5 2
144
30 8
12
30 8 h b G
Lbh P
bh
h
G
Lb P
U
v
= |
.
|
\
|
= , y como A bh =
AG
L P
AG
L P
U
V
2 2
5
3
240
144
= =
AG
L P
GEI
L P P
2 3 2
5
3
2
+ =
A
|
|
|
|
.
|
\
|
+ =
(
+ =
(
+ = A
2
3
3 3 3
5
12
18
1
3 3 5
6
3 AGL
bh
E
EI
PL
AG
L
EI
L
P
AG
L
EI
L
P
|
|
.
|
\
|
+ = A
2
2 3
10
3
1
3 L
h
G
E
EI
PL
1 ~ , por que
6 . 2
E
G = ,
( ) v
E
G
+
=
1 2
;
.3
Para razones de 2 . 0 =
L
h
( ) ( ) 04 . 1 04 . 1
3
3
f
EI
PL
A = = A Que casi no cuenta
Ejemplo:
P
2
L
2
L
b
h
? = A,
4
PL
( )dv dv U U
vol
x x
vol
} }
= = ......
0
o c
( ) ( ) | |dvol P
vol
flex x x
}
+ = A t o c
2
1
E
x
x
o
c = ; dv
t GI
Q V
y
EI
M
PA
v v
(
+ =
} } 2 2
2 2
2
2
2
2
1
G
t
=
y
I
M
x
= o dv dxdA=
2
h
( ) y
h
2
y dy
2
h
(
(
(
(
+
|
.
|
\
|
|
.
|
\
|
= y
y
h
b y
h
Q
2
2
2
dx dA
t GI
Q V
dA y
EI
M
PA
L A A
} } }
(
+ =
2 2
2 2
2
2
2
2
1
}
(
+ =
L
t GI
h b V
EI
M
PA
2 2
3 2 2
2
1
}
dA Q
2
( )
} }
=
(
(
+ =
2
0
2 2
1
0
2
2
4
1
2
1
L
x
dx x P
EI
dx Q
EI
M
PA
Sabiendo ( )
2
x
P
x M = ,
2
0
L
x < <
| |
xz xz x x
U t c o + + = ...
2
1
0
f
U o
0
N
U o
0
o
t
0
U
x
U t
0
0
U
}
= dv U U
0
( ) | |dx dA U
L
A
x x F } }
=
0
0
o c
o
EI
L M
dx dA y
I
M
E
U
L
2 2
1
2
0
2
2
2
0
=
|
|
.
|
\
|
=
} }
P P
P P
-P
L P 2 -P P 2 0 P 2 De la barra
Punteada
A + =
0
L Lf
P
P P P
P P
3L
R=1
0 0
2
2
R R=1
2
2
R fR
L L A + =
0
0 0
0
L
AE
RL
L
f
+ =
( ) ( ) P R P
E
+ A = A
0
TRABAJO VIRTUAL HOFF
0 = W o
Teorema de la energa mnima
Teorema de la energa complementaria mnima
y,v
w
x,u
u dv U U
v
}
=
0
v
0 = =
i e
w w w o o o
i e
w w o o = 0 =
i
w o Cuando es un cuerpo rgido.
De la figura 3 del problema anterior
= = A
i i
f w o o * 1 desfs.
Ejemplo
( )
L
P x L
P
0
=
x v ( )
( )
|
.
|
\
|
+
=
3 2
2
0
x L
x
L
x L P
x M
|
.
|
\
|
= x
L
M
2
o c dx
dx dA W c
o
2
=
dx d y
I
M
E
A |
.
|
\
| 1
( )
} }
L
dx dA y
I
M
E
0
2
2
2
1
dx
d
k dx
EI
M
EI
M
dw
0
= = = |
.
|
\
|
=
1
2
2
dx
dx
d
M dw
0
=
( )
dx
EI
x L
x x L
x
L
L
P
V W
L
|
.
|
\
|
+
|
.
|
\
|
= =
}
3
2 2
1
2
0
0
Aplicando al problema de la armadura
2 / 2
2 / 2 2 / 2
2 / 2
( )
( )
AE
L P
AE
PL
AE
L P
AE
L P
v
p
2 2 1
2
2
2
2
2
2
* 1 +
|
|
.
|
\
|
+
|
|
.
|
\
|
+
=
R
R
R
Debido a la Redundante A + +
R P
v v L
0
AE
L R
AE
KL
v
R
2 1
2
2
4
* 1 +
|
|
.
|
\
|
= =
AE
L R
v v
R T
2
= = A + =
0
L L
f
Ejemplo
4=6
3`
2
15in A=
v
3
3000
2
25 . 0 in A=
60=5
E
A
al
15 . 0
60 * 2500
arg
=
2500
2500
v
-2500
3000 2500
E
A
Acort
25 . 0
60 * 2500
=
=1
300
|
.
|
\
|
+ =
25 . 0
60 * 2500
15 . 0
60 * 2500 833 . 0
* 1
E
v
Haciendo Algebra
2 2 2
2
2
2
+
|
.
|
\
|
+
=
P
R
Ejemplo:
2 / L
( )
( )
L
x L P
v P
=
0
( ) ( )
LEI
x L P
EI
x M
6
3
=
x
L
2
=1
( )
|
.
|
\
|
= x
L
x m
2
( )
2
0
5 4 2 2 3 4
3
2 4
0
3 2
0
0
2
5 4
3
3
3
2 8 6
3
6 2 6
0
L
L
L
x Lx x L x L Lx
x
L
x
L
EIL
P
dx x L x
L
LEI
P
U
(
+ + = |
.
|
\
|
= =
}
Cargando a la viga con la redundante
dx x
L
AE
R
v
R
2
0
2
}
|
.
|
\
|
=
0
0
= +
R P
v v
Ejemplo:
w (x)
10
v
20
v
=1
L
3
2
=1
1
R
11
v
12
v
2
R
21
v
22
v
0
12 11 10
= + + v v v
0
22 21 20
= + + v v v
EJEMPLO
P L P
L 1 + 2
H=? P H H
PL HL HL
D A
H
H A
0 = AT H p A + A
( ) Px x M = 1<x<2 m=x
( ) ( ) x L P x M = 2<x<3 m(x)=L
( ) 0 = x M 3<x<4 m(x)=(L-x)
1
2 3
4
3
( ) ( )
(
+ + = = = A =
} } } } }
L L L
vol vol
e
dx x L Ldx x L P dx Px
EI
dx
EI
M
m dw p dw
0 0 0
2
0
1
1
EI
PL L L
EI
P
3 3 3
6
5
2 3
=
(
+ =
(
+ + = = = A
} } } } }
L L L
long
H
vol
e
dx x L x L H dx L L H dx x Hx
EI
dx
EI
M
m dw H
0 0 0
) )( ( ) )( ( ) )( (
1
1 *
(
+ + = x HL
Hx
EI
2
3
3
1
EI
H L L
L L L
L
EI
H
3
5
3 3
3 3
3 3 3
3
(
+ + + =
EI
PL
P
6
5
3
= A
EI
H L
EI
PL
T
3
5
6
5
0
3 3
= A =
Ejemplo:
Desplazamientos en A debido a flexin nicamente
D ? =
Horizontal
A
? =
Vertical
A
a EI=cte
B
C a
a
A
F
F 2a
+
(-)
(-) + a
a
Fa +
H=1
F
B A m=x M=0
C B m=a M=Fx
D C m=a+x MFa
( )
a a
a a
long vol
e
x
ax
EI
Fa x
EI
Fa
dx
EI
Fa
x a dx
EI
Fx
a ds
EI
s M
s m dw H
0
2
0
2
0 0
2 2
) (
) ( 1 *
(
+ +
(
= + + = |
.
|
\
|
= = A
} } } }
EI
Fa
EI
Fa
EI
Fa
H
3 3 3
2
2
3
2
= + = A
Para los verticales
m= 0 M= 0
m= -x M= -Fx
m= -a M= -Fa
} } }
= + = = A
a a
dx
EI
Fa
dx
EI
Fx
ds
EI
s M
s m v
0
2
0
2
) (
) ( 1 *
Ejemplo
A
A=0.5
2
in
E=30x10
3
ksi
C B
Deformacin vertical en el punto B=?
2 2
F=12k
A=4in
2
EI=10
6
k-in
2
E=30x10
3
ksi
6
8
10 D.M.F.
D.F.N.
6
8 PL/4
8
1=3/3
4/3 A
D.F.N. 5/3
4/3
B
C 4
dx
x x x
x
dx
x x x
x
dx
EI
mM
tA
PPdx
B
} } } }
+ = + = A
5
0
3
4
0
3
10 30 5 . 0 3
5 10
10 30 4 3
4 8
1 *
CIRCULO DE MOHR PARA 3 DIMENSIONES
Para un estado de esfuerzos dado, existe una ecuacin cbica en , cuyas races
1
0 = ,
2
0 =
y
3
0 = dan las magnitudes de los esfuerzos principales.
Todas las races son reales:
0
3 2
2
1
3
= I I I , Ecuacin caracterstica
z y x
I o o o + + =
1
= traza
x z z y y x zx yz xy
I o o o o o o t t t + + =
2 2 2
2
La suma de los menores
y
x z
x
z y
z
y x zx yz xxy z y x
I
2 2 2
3
2 t o t o t o t t t o o o + + = Determinante
Ejemplo
10.9
Estratificado en forma de capas.
Coeficiente de friccin esttica de roca sobre roca (chef de resbalamiento) la cohesin vale 1
kg/cm
2
. La cohesin se opone a la Tensin.
y
30
0
10 kg/cm
2
'
x
o
30
0
x
2 kg/cm
2
Son esfuerzos principales ya que no hay cortantes
0 t 0
o o o o
o 2 2 cos
2 2
' sen
xy
y x y x
x
+
+
+
=
0 60 cos
2
10 2
2
10 2
' +
+
+
=
x
o , cero por que no existe
xy
t
4 2 6
2
1
4 6 ' = + = |
.
|
\
|
+ =
x
o , No puede ser criterio ya que indica que es compresin.
0 t 0
o o
t 2 cos 2
2
' ' xy
y x
y x
sen +
=
0 60
2
10 2
' '
+
+
= sen
y x
t
3 2
2
3
4
' '
= =
y x
t , esto aun no da nada en claro.
Ya que no se han involucrado coeficientes de friccion estatico y la cohesin, pero sabemos que
N F
f
=
A N
o t =
cohesin
) 1 ( 5 . 0 = t
5 . 0 = t
Como en el cortante es independiente de la direccin, vemos que el elemento no soporta:
3 2 = t
Ejemplo
y
P
A P
z 12.5
125
20
12.5 B
x
SOLUCION
cm 5 . 2 = |
kg P 75 =
P
DFC a
A
B
-P
DMF
DMT
a
Para a - a
kg V
y
75 =
cm kg x M
z
/ 5 . 937 5 . 12 75 = =
cm kg x M
T
/ 1500 20 75 = =
Para un elemento en la parte superior.
2
3 4
/ 155 . 611
2
5 . 2
4 5 . 937
2
5 . 2
2
5 . 2
4
5 . 937
cm kg
x
x
x y
I
M
z
z
x
=
|
.
|
\
|
=
|
.
|
\
|
= =
t
t
o
cm kg
x
x
x
xb I
ydA V
J
C M
z
y
T
xyz
/ 92 . 488
2
5 . 2
2 1500
2
5 . 2
2
5 . 2
2
1500
3 4
=
|
.
|
\
|
=
|
.
|
\
|
= + =
}
t
t
t
Los esfuerzos principales son:
xy
t
x
o
x
o
5775 . 305
2
155 . 611
2
=
=
+
=
y x
a
o o
559 . 576
2
2
2
= +
|
|
.
|
\
|
=
xy
y x
r t
o o
xy
t
( )
xy x
t o ,
0 2
x
o
0 2
599 . 1
5775 . 305
92 . 488
2 tan =
= 0 ;
0
994 . 57 2 = 0
0
997 . 28 = 0
( )
2
max
/ 43 . 882 559 . 576 5775 . 305 cm kg = + = o
2
min
/ 98 . 270 5775 . 305 559 . 576 cm kg = = o
2
/ 98 . 270 cm kg = o
0
2
/ 43 . 882 cm kg = o
Para un elemento en el extremo anterior
0 =
x
o , por que este punto esta E. N.
xb I
ydA V
J
C M
z
y
T
xy
}
+ = t ;
} }
=
2
0
t
0 0 dr rd rsen ydA
A
V
J
d M
T
xy
3
4
2
+ = t | |
3
2
1 1
3
3 3
r r
= =
4
2 3
2 75
92 . 488
4
3
r
rx x
r x
xy
t
t =
2
2
/ 52 . 468
3
4 75
92 . 488 cm kg
r
x
xy
= =
t
t
xy
t
a=0
r=468.62kg/cm
2
xy
t
x
o
472.62 kg/cm
2
472.62 kg/cm
2
45
EJEMPLO
y
D
90 cm
300 cm
y
A
x
C z B
z
A=10.65cm
2
I=59.77cm
4
Rt A t 2 =
R
A
t
t 2
=
t R I
3
t =
2 2
2 3
AR
R
A R
I = =
t
t
cm
A
I
R 35 . 3
2
= =
cm t 506 . 0 =
z
z
B
A
y x
x
45 kg 200kg
200 kg
e. N.
D C
e. N.
- 45kg
13500 kg/cm
D. M. F. z e. N.
- 18000 kg/cm
e. N.
4050 kg/cm
e. N.
Para A
x
Iz
Mz
z
Ix
Mx
A
Ny
y
+ + = o
2
/ 6 . 1027
77 . 59
35 . 3 18000
65 . 10
200
cm kg
x
y
=
+ = o
xb I
zdA V
J
r M
z
z
T
yz
}
+ = t ;
} }
= =
t
0 0
0
2
2 t r trd rsen zdA
( )
2
2
/ 9 . 121
506 . 0 2 77 . 59
35 . 3 506 . 0 2 45
2 77 . 59
35 . 3 4050
cm kg
x x
x x x
x
x
yz
= + = t
Para B
2
/ 43 . 775 0 35 . 3
77 . 59
13500
65 . 10
200
cm kg x
y
= + + = o
2
/ 5 . 113
2 77 . 59
35 . 3 4050
cm kg
x
x
yz
= = t
D. F. N. y
D. F. C. z
D. M. F. z
D. M. T. y
EJEMPLO
50
37.5
F
2
25 4
3
F
a F
1
a
B
z A
z
x
DATOS
cm 5 = |
kg F t 25 =
t
t
20
5
4 25
1
= =
x
F
t
t
15
5
3 25
2
= =
x
F
Debido a F
1
en a-a
t 20
1
= = F Ny
t 750 5 . 37
1
= = x F Mx
t 1000 50
1
= = x F Mz
Debido a F
2
en a-a
t 15
2
= = F Vx
t 375 25
2
= = x F Mz
t 5 . 562 5 . 37
2
= = x F My
En A
( )
3 4
2 2
750 64
25
4 20
2
16 4
750
25
4 20
5
4
20
D
x x D
D
x
x
Iz
Mz
z
Ix
Mx
x
y
+ = + = + + =
t
t
t
t
o
2
/ 8 . 188 192 2 . 3 cm kg
y
= + = o
( ) ( )
2
16 2
5 . 562
16 4
15
4 4
D
x
D
xdA
xD
D
yx
t
t
t
t
t
+ + =
}
2
3 5
3
/ 8 . 68
2
32 5 . 562
3 8
2 64 15
cm kg
D
x
x xD
D x x
yx
= = t
En B
( )
( )
2
3 4
/ 2 . 355
2
64 1375
25
80
2
16 4
1375
25
4
20
cm kg
D
x D
x
D
y
= =
+ =
t
t
t
t
o
2
4
/ 72
2
32 5 . 562
cm kg
x xD
xDx x
yz
= =
t
t
t
y
o
y
o
yz
t
xy
t
y
o
y
o
A
B
Ejemplo
0 0
b
|
|
.
|
\
|
=
2
2
2 2
2
1
r
b
a b
ia
r
o
|
|
.
|
\
|
+
=
2
2
2 2
2
1
r
b
a b
ia
o
0
Para b=1.1a
( )
|
|
.
|
\
|
+
=
2
2
2
2
21 . 1
1
1 21 . 1 r
a
a
ia
o
0
|
|
.
|
\
|
=
|
|
.
|
\
|
=
2
2 2
2
2 2
21 . 1
762 . 4
21 . 1
21 . 0 r
a r
i
r
a r i
o
0
Para cilindros de pared delgada, el esfuerzo cortante es:
Izt
ydA P
}
= t
a
r
( ) 0 cos b a t =
0 ird P =
}
r rsen rd i 0 0
EJEMPLO
w kg/cm
30 cm 20 cm
15
75 150 75
30
150w
DFC
-150w
11250w
DMF
En la parte central:
y
I
M
z
z
x
= o ; cm wkg M
z
/ 11250 =
( )
4 3
33750 30 15
12
1
cm I
z
= =
15 = y
2
/ 100 cm kg
x
= o
;
33750
15 11250
100
wx
= 2 . 0
15 11250
33750
= =
x
w
0 =
xy
t
2
max
/ 100 cm kg = o , para 2 . 0 = w
Para el inicio de la viga:
15
150
x I
ydA wx
z
xy
}
= t 750
2
15 15
10
0
2
10
0
= = =
} }
y
ydy ydA
( )( ) 10000 20 15
12
1
3
= =
z
I
w
x
wx
xy
75 . 0
15 10000
750 150
=
= t
w 75 . 0 10 = ; 33 . 13 = w
0 =
x
o
m kg cm kg w / 2000 / 2 . 0 = =
COMPONENTES HIDROSTATICA Y DESVIADOR DISTORSIONAL DE
ESFUERZOS
El tensor total de esfuerzos puede ser dividido en un tensor principal de esfuerzo o hidrosttico
m
o , el cual involucra solamente tensin o compresin puras y en el tensor desviador
distorsional de esfuerzos,
'
ij
o el cual representa el esfuerzo cortante en el estado total de
esfuerzos. Fig. 2.18
En directa analoga con la situacin.
El componente hidrosttico del tensor esfuerzo produce solamente cambio de volumen elstico
y no causa deformacin plstica.
Experimento muestran que el esfuerzo de fluencia de metales es independiente del esfuerzo
hidrosttico aunque la fractura de deformacin es fuertemente influenciada por el esfuerzo
hidrosttico. Ya que el esfuerzo desviador involucra a los esfuerzos cortantes en causar
deformacin plstica.
El esfuerzo hidrosttico esta dado por:
3 3
3 2 1
o o o
o o o
o
+ +
=
+ +
=
z y x
m
El esfuerzo desviador es:
ij m ij ij
t o o o =
'
Donde
|
|
|
.
|
\
|
=
1 0 0
0 1 0
0 0 1
ij
t =
j i
j i
=
=
, 0
, 1
delta de Kronecker
Es un tensor isotropico unitario de segundo rango.
z zy zx
yz y yx
xz xy x
ij
o t t
t o t
t t o
o o o
o o o
o o o
o = =
33 23 13
23 22 12
13 12 11
Tensor de esfuerzos
1er Invariante es la traza de la matriz es decir la suma de los trminos de la diagonal principal,
33 22 11 1
o o o + + = I
2do Invariante es la suma de los menores principales:
22 12
12 11
33 13
13 11
33 23
23 22
2
o o
o o
o o
o o
o o
o o
+ + = I
3er Invariante es el determinante de la matriz de los componentes del tensor esfuerzo:
3
2
3
2
3
2
'
y x z
zy zx
yz
x z y
yx
xz xy
z y x
ij
o o o
t t
t
o o o
t
t t
o o o
o
=
El tensor desviador involucra esfuerzos cortantes, por ejemplo refiriendo
'
ij
o a un sistema de
ejes principales.
( ) ( )
3 3
2
3 1 2 1 3 2 1 '
1
o o o o o o o
o
+
=
=
( )
2 3
3 1 2 1 '
1
3
2
2 2 3
2
t t
o o o o
o + = |
.
|
\
|
+
=
Donde
3
t y
2
t son los esfuerzos cortantes pptes.
Ya que
'
ij
o es un tensor de 2do rango, tiene ejes principales. Los valores principales del
esfuerzo desviador son las races de la ecuacin cbica:
( ) ( ) 0
3
'
2
3
'
1
3
'
= J J J o o o
Donde
2 1
, J J y
3
J son los invariantes del tensor de esfuerzos desviador.
( ) ( ) ( ) 0
1
= + + =
n z m y m x
J o o o o o o
o sea la suma de los trminos de la diagonal principal de
'
ij
o .
2
J Puede ser obtenido a partir de la suma de los menores principales de
'
ij
o .
' ' ' ' ' ' 2 2 2
2 x z z y y x xz yz xy
J o o o o o o t t t + + =
( ) ( ) ( ) ( ) | |
2 2 2 2 2 2
2
6
6
1
xz yz xy x z z y y x
J t t t o o o o o o + + + + + =
3
J es el determinante de la ecuacin
'
ij
o .
CRITERIO DE FLUENCIA PARA MATERIALES DUCTILES
El problema de deducir relaciones matemticas para predecir las condiciones a las cuales la
fluencia plstica comienza cuando un material esta sujeto a alguna posible combinacin de
esfuerzos es una consideracin importante en el campo de la plasticidad. En carga uniaxial
como en una prueba de tensin, el flujo plstico macroscopico empezara en el esfuerzo de
fluencia
0
o .
Se espera que la fluencia bajo una situacin de esfuerzos combinados pueda ser relacionada a la
misma combinacin particular de esfuerzos principales.
Existe en la actualidad formas No tericas de calcular las relaciones entre componente de
esfuerzo y la correlacin de la fluencia para un estado tridimensional de esfuerzos con fluencia
en la prueba de tensin uniaxial.
Los criterios de fluencia son esencialmente relaciones empricas. Sin embargo, un criterio de
fluencia debe ser consistente con un nmero de observaciones experimentales, el mas
importante de ellos es que la presin hidrosttica pura no causa fluencia en un solid continuo.
Como un resultado de esto, la componente hidrosttica de un estado de esfuerzo complejo no
influye al esfuerzo al cual la fluencia ocurre
De esta forma, ________________ para el esfuerzo desviador, ser o estar involucrado con la
fluencia. Mas aun, para un material isotropico, el criterio de fluencia podr ser independiente de
los ejes escogidos, es decir podr ser una funcin invariante.
Estas consideraciones conducen a la conclusin que el criterio de fluencia podr ser alguna
funcin de los invariantes de el esfuerzo desviador. Actualmente hay dos criterios generalmente
aceptados para predecir la fluencia en materiales dctiles.
CRITERIO DE VON MISES O CRITERIO DE LA ENERGIA DE DISTORSION
Von mises (1913) propuso que la fluencia podra ocurrir cuando el segundo invariante de el
esfuerzo distorsional desviador
2
J excediera algn valor crtico:
2
2
k = J
Donde: ( ) ( ) ( ) | |
2
1 3
2
3 2
2
2 1 2
6
1
o o o o o o + + = J
Para valuar la constante k y relacionarla a la prueba de tensin, realizaremos que en la fluencia
en tensin uniaxial
0
1
= o 0
3 2
= =o o
Sustituyendo en la ecuacin anterior | |
2
J
2 2
0
2
0
6k o o = +
k o 3
0
=
Sustituyendo esta ecuacin en la primera obtenemos la forma usual del criterio de fluencia de
Von-Mises.
( ) ( ) ( ) | |
2
1
2
1 3
2
3 2
2
2 1 0
2
1
o o o o o o o + + =
O bien
( ) ( ) ( ) ( ) | |
2
1
2
2 2 2 2 2 2
0
6
2
1
zx yz xy x z z y y x
t t t o o o o o o o + + + + + + =
Las ecuaciones anteriores predicen que la fluencia puede ocurrir cuando la diferencia de
esfuerzos en el lado derecho de la ecuacin excede el esfuerzo de fluencia en tensin uniaxial
0
o .
Para identificar la constante k en la ecuacin (3-10) considere el estado de esfuerzos en corte
puro como es producido en una prueba de torsin.
t o o = =
3 1
0
2
= o
at yielding
2 2
1
2
1
2
1
6 4 k o o o = + +
k o =
1
Tal que k representa el esfuerzo de fluencia en corte puro (Torsin). De esta forma el criterio
de Von Mises predice que el esfuerzo de fluencia en torsin ser menor que en tensin uniaxial
de acuerdo a
0 0
577 . 0
3
1
o o k = =
Resumiendo, note que el criterio de fluencia de Von Mises implica que la fluencia no depende
solamente sobre algn esfuerzo normal o cortante en particular, pero en lugar de eso la fluencia
depende (de) sobre una funcin de todos, los tres valores de los esfuerzos cortantes principales.
Ya que el criterio de fluencia esta basado en diferencias de esfuerzos normales
2 1
o o , etc.
El criterio es independiente de las componentes hidrostticas de esfuerzo. Ya que el criterio de
Von Mises involucra trminos al cuadrado, el resultado es independiente de le signo de los
esfuerzos individuales de esfuerzo.
Esto es una ventaja importante ya que no es necesario conocer cual es el mayor o menor
esfuerzo principal para usar este criterio.
Von Mises propuso este criterio debida a su simplicidad matemtica.
Posteriormente otros trabajos han sido aceptados para dar principio fsico.
Hencky (1924) mostr que la ecuacin
( ) ( ) ( ) | |
2
1
2
1 3
2
3 2
2
2 1 0
2
1
o o o o o o o + + =
Sustituyendo en la ecuacin ( ) se tiene:
( )
2
2
1
2
0
3
6
1
18
I I
G
Ir
U + =
k
La ecuacin anterior es importante por que muestra que la energa total de deformacin puede
ser dividida en un trmino dependiente del cambio en volumen y un trmino dependiente de la
distorsin.
( ) ( )
3 1 3 2 2 1
2
3
2
2
2
1 0
6
1
o o o o o o o o o + + =
G
U
dist
( ) ( ) ( ) ( ) | |
2
1 3
2
3 2
2
2 1 0
12
1
o o o o o o + + =
G
U
dist
Para un estado uniaxial de esfuerzo
0 1
o o =
0
3 2
= =o o
( )
2
0 0
2
12
1
o
G
U
dist
=
o
( ) ( ) ( ) | |
2
1 3
2
3 2
2
2 1 0
2
1
o o o o o o o + + =
Fue (era) equivalente a considerar que la fluencia ocurre cuando la Energa de Distorsin
alcanza un valor crtico.
La energa de distorsin es aquella parte de energa total de deformacin por unidad de volumen
que es involucrada (implicada) en cambiar de forma as como opuesto (oponerse) a un cambio
en volumen.
El hecho que la energa total de deformacin puede ser dividida dentro un trmino dependiente
al cambio de volumen y un trmino dependiendo la distorsin puede ser visto por la expresin
de la ecuacin 2-84 en trminos de esfuerzos pples.
( ) | |
3 1 3 2 2 1
2
3
2
2
2
1 0
2
2
1
o o o o o o v o o o + + + + =
E
U
o expresada en trminos de los invariantes del tensor de esfuerzos
( ) ( ) v + = 1 2
2
1
2
2
1 0
I I
E
U
Esta expresin es mas significativa si la expresamos en trminos del modulo de Bula (cambio de
volumen) y el modulo de corte (distorsin)
G
G
E
+
=
k
k
3
9
G
G
2 6
2 3
=
k
k
v
( ) v +
=
1 2
E
G
( ) v
o
k
2 1 3
=
A
=
E
m
,
E
v 2 1
= A
G: modulo de elasticidad en corte
modulo de rigidez
determinado a partir de una prueba de torsin.
E: modulo de elasticidad
v : relacin de Poisson
k : modulo de Bulk: es la razn de la presin Hidrosttica a la dilatacin que es producida
|
k
1
=
A
=
= presin hidrosttica
| = compresibilidad
A = volumen deformado
IV TENSION TRIAXIAL IGUAL
Los tres crculos se han transformado en puntos superpuestos, sin existir esfuerzo cortante en
direccin alguna. Adems el esfuerzo de tensin es el mismo en cualquier direccin. Sucedera
lo mismo para la compresin triaxial igual.
Dibujo
x y
o o = t
z y x
o o o = = o
x
o
x z
o o =
V TENSION Y COMPRESION IGUALES
El crculo de Mohr se encuentra en el origen y el esfuerzo de cortante mximo es igual al
esfuerzo de tensin.
Dibujo
x y
o o =
z
y
1
t
z
x
1
t
t
x MAX
o t =
o
y
o
x
o
0 =
z
o
VI CORTANTE PURO (PLANO)
El estado de esfuerzo es igual al caso anterior. Un elemento en estas condiciones se puede
convertir a uno de tensin y compresin iguales.
Dibujo
t
yx
t
xy
t
xy
t o
xy MIN
t t =
xy MAX 1
t t =
yx
t
0 =
z
o
De Mohr, para representar ntegramente un elemento bajo la accin de fuerzas.
CASOS PARTICULARES DE ESFUERZOS
I.- Tensin pura.
Dos de los crculos se han transformado en un punto.
Dibujo
y
t
2
max
x
o
t =
x
o 0 , =
z y
o o
x
o o
z
II.- Compresion pura.
Es el mismo caso de la tension pura, solo que con los signos contrarios.
Dibujo
z t
max
t
0 o
x
o
x
o 0 , =
z y
o o
y
III.- Tension Biaxial Igual
Los esfuerzos de tension son iguales en las direcciones X y Y, y en z=0. Uno de los
circulos se transforma en un punto y los otros dos son iguales, no existe cortante en direccion
paralela al eje z.
Dibujo
x y
o o = t
2 2
max
y
x
o
o
t = =
o
z y
o o =
x
o 0 =
z
o
x
o o o = =
2 1
You might also like
- Cabra VoladoraDocument14 pagesCabra VoladoraIsrael GonzálezNo ratings yet
- EPOXI Resumen v02Document6 pagesEPOXI Resumen v02Dm MayitoNo ratings yet
- Presentacion Elementos MecanicosDocument15 pagesPresentacion Elementos MecanicosIsrael GonzálezNo ratings yet
- Gráficas Diagramas de FaseDocument3 pagesGráficas Diagramas de FaseIsrael GonzálezNo ratings yet
- MFpresentacionDocument8 pagesMFpresentacionIsrael GonzálezNo ratings yet
- Análisis Del EjeDocument5 pagesAnálisis Del EjeIsrael GonzálezNo ratings yet
- Práctica 7 Túnel de HumoDocument6 pagesPráctica 7 Túnel de HumoIsrael GonzálezNo ratings yet
- Conv Militares 2013 PDFDocument44 pagesConv Militares 2013 PDFJulio GámezNo ratings yet
- Estructuras Osvaldo RuizDocument20 pagesEstructuras Osvaldo RuizIsrael GonzálezNo ratings yet
- Práctica 7 Túnel de HumoDocument6 pagesPráctica 7 Túnel de HumoIsrael GonzálezNo ratings yet
- Viscosidad Cinemática Del AguaDocument1 pageViscosidad Cinemática Del AguaJorge Delgado33% (3)
- Repaso TermodinamicaDocument54 pagesRepaso TermodinamicaIsrael GonzálezNo ratings yet
- Calculo VectorialDocument20 pagesCalculo VectorialUiichitho ZhamudhioNo ratings yet
- Estructuras Cristalinas y Defectos en La Estructura CristalinaDocument3 pagesEstructuras Cristalinas y Defectos en La Estructura CristalinaIsrael GonzálezNo ratings yet
- Teoria ProbabilidadDocument62 pagesTeoria ProbabilidadIsrael GonzálezNo ratings yet
- Proyecto de InstalacionesDocument16 pagesProyecto de InstalacionesluisNo ratings yet
- Brochure 6Document22 pagesBrochure 6Aldo AldoNo ratings yet
- Caso PracticoDocument7 pagesCaso PracticoEsteban Aguayo BandaNo ratings yet
- T5PropMec0607 PDFDocument13 pagesT5PropMec0607 PDFpatricioNo ratings yet
- Código Deontológico de Los Ingenieros AutomotricesDocument6 pagesCódigo Deontológico de Los Ingenieros AutomotricesCarlos Jarama H0% (1)
- Estructura Alto Nivel y Breve Historia NormasDocument39 pagesEstructura Alto Nivel y Breve Historia NormasAndrés GrandaNo ratings yet
- Programa FASTADocument6 pagesPrograma FASTAGus LopezNo ratings yet
- Ejemplo Proyecto MasterCamDocument5 pagesEjemplo Proyecto MasterCamJavier PadillaNo ratings yet
- Eléctrica 2023-2Document9 pagesEléctrica 2023-2montse châvezNo ratings yet
- Muestreo y CuarteoDocument12 pagesMuestreo y CuarteoMArko Antonio TiconaNo ratings yet
- MONOGRAFIADocument31 pagesMONOGRAFIAGiuliana ACNo ratings yet
- CI182 Ingenieria Ambiental 201901Document6 pagesCI182 Ingenieria Ambiental 201901Victor SuarezNo ratings yet
- Mantención para Centro de Agua Mar Industria Salmonera Saustral ChiloeDocument10 pagesMantención para Centro de Agua Mar Industria Salmonera Saustral ChiloePedro CabrerraNo ratings yet
- Práctica 9 Análisis de Circuitos Resistivos Por El Teorema de NortonDocument9 pagesPráctica 9 Análisis de Circuitos Resistivos Por El Teorema de NortonCesar Castillo SalgadoNo ratings yet
- Mapa ConceptualDocument1 pageMapa Conceptualrickynoel87No ratings yet
- Informe Levantaminto Por RadiacionDocument12 pagesInforme Levantaminto Por Radiacionronald jara quispeNo ratings yet
- Sílabo Metrología PDFDocument7 pagesSílabo Metrología PDFFernando RamírezNo ratings yet
- Proyecto Estudio de Carga U.E Maria AuxiliadoraDocument7 pagesProyecto Estudio de Carga U.E Maria AuxiliadoraCruz Alejandro Brito CarreñoNo ratings yet
- Tesis Cantera CubaDocument87 pagesTesis Cantera Cubasergio escobarNo ratings yet
- Estudios de Corto CircuitoDocument3 pagesEstudios de Corto Circuitovashx1No ratings yet
- Calidad Total - CPM y PERT - Dos Métodos Fundamentales en La Gestión de ProyectosDocument6 pagesCalidad Total - CPM y PERT - Dos Métodos Fundamentales en La Gestión de ProyectosJaime HonigmanNo ratings yet
- Articulo de OpinionDocument4 pagesArticulo de OpinionMalu Indira Rivera FernandesNo ratings yet
- CV Alexander Lara 2019Document4 pagesCV Alexander Lara 2019Alexander Jair Lara OviedoNo ratings yet
- Nivelacion CompuestaDocument23 pagesNivelacion CompuestaYolbiSalvatierraNo ratings yet
- CNC TextoDocument77 pagesCNC Textoasdffg dasd100% (1)
- Diseño de Mezcla PatronDocument14 pagesDiseño de Mezcla PatronGustavo YánacNo ratings yet
- Taller 1 S. Costeo (6183) PDFDocument5 pagesTaller 1 S. Costeo (6183) PDFCatalina PalacioNo ratings yet
- OyM - Caso de IndustriasDocument4 pagesOyM - Caso de IndustriasNATHALIA YOSHIRA LOPEZNo ratings yet
- Casa Domotica Digital PDFDocument114 pagesCasa Domotica Digital PDFwillNo ratings yet
- Siskind 13Document44 pagesSiskind 13Isai SantanaNo ratings yet