You might also like
- Metrados Veredas, Martillos, Cunetas y AlcantarillasDocument126 pagesMetrados Veredas, Martillos, Cunetas y AlcantarillasDrago EspejoNo ratings yet
- Excel DiseñoDocument12 pagesExcel DiseñoEspecializacion 2023No ratings yet
- Matemática II: Cálculo Diferencial e IntegralDocument5 pagesMatemática II: Cálculo Diferencial e IntegralJanquiNo ratings yet
- P3 Darcy y Hazen Reservorio A 2 Ramales Mejor SoluciónDocument3 pagesP3 Darcy y Hazen Reservorio A 2 Ramales Mejor SoluciónLuis Angel Jimenez AyoraNo ratings yet
- FLEXION LaboratorioDocument33 pagesFLEXION LaboratorioPaul ColcaNo ratings yet
- Topografía Básica Unidad 2ADocument17 pagesTopografía Básica Unidad 2AAdolfo Cornelio PalacioNo ratings yet
- Cv. Ing. MHPC - Saneamiento 5 Años 1Document1 pageCv. Ing. MHPC - Saneamiento 5 Años 1LiamNo ratings yet
- Informe Del Sismo de Azangaro, Azangaro - Puno PDFDocument156 pagesInforme Del Sismo de Azangaro, Azangaro - Puno PDFshomarita genoveva quilly ccorimanyaNo ratings yet
- LABORATORIO - 4 "Medición de Presión"Document15 pagesLABORATORIO - 4 "Medición de Presión"Andrés Marcelo Vargas IbáñezNo ratings yet
- Metrado de Cargas de Una EscaleraDocument4 pagesMetrado de Cargas de Una Escaleraalexander1176100% (1)
- Estudio hidrológico de la cuenca del km 93 Tijuana-EnsenadaDocument21 pagesEstudio hidrológico de la cuenca del km 93 Tijuana-EnsenadaDamian CFNo ratings yet
- Curvas y Superficies de Nivel IngenieríaDocument16 pagesCurvas y Superficies de Nivel IngenieríatenienteNo ratings yet
- Informe 14-ADICIONAL DE OBRADocument4 pagesInforme 14-ADICIONAL DE OBRAdaltonNo ratings yet
- 11 Movimiento Vertical de Caída Libre IIDocument5 pages11 Movimiento Vertical de Caída Libre IInamiaseNo ratings yet
- Ejercicio de Cuerpo RigidoDocument4 pagesEjercicio de Cuerpo RigidoPaolo Vilca RíosNo ratings yet
- Sección Cuneta Tipica InviasDocument1 pageSección Cuneta Tipica InviasMiguel RuizNo ratings yet
- II Etapa Analisis de CostosDocument153 pagesII Etapa Analisis de CostosWalter MamaniNo ratings yet
- Guia Maap - Calculo IIDocument76 pagesGuia Maap - Calculo IILuis Augusto Calizaya CastilloNo ratings yet
- Certificado Excel PDFDocument1 pageCertificado Excel PDFPatricia Maribel Mamani CallallaNo ratings yet
- LAB CAIDA LibreDocument13 pagesLAB CAIDA LibreRafael AtencioNo ratings yet
- Costo de Mano de ObraDocument13 pagesCosto de Mano de ObraJames GamboaNo ratings yet
- Labo Pendulo Fisico y Teorema de Steiner 2Document22 pagesLabo Pendulo Fisico y Teorema de Steiner 2luis1419941No ratings yet
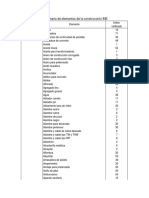
- Indices Unificados PDFDocument18 pagesIndices Unificados PDFAida YamileNo ratings yet
- Analisis de Costos UnitariosDocument11 pagesAnalisis de Costos UnitariosCesar CadenasNo ratings yet
- CronogramasDocument11 pagesCronogramasManuel Hugo Puican CarreñoNo ratings yet
- Ing Mecánico Electricista JJohnJimmy Portugal exp 10+ añosDocument7 pagesIng Mecánico Electricista JJohnJimmy Portugal exp 10+ añosTorikus DepredadorNo ratings yet
- Laboratorio 2 - Turbina PeltonDocument30 pagesLaboratorio 2 - Turbina PeltonLuis Angel Payano LavadoNo ratings yet
- 1ra Sesión Ecuaciones DiferencialesDocument6 pages1ra Sesión Ecuaciones DiferencialesJon TorresNo ratings yet
- Mediciones indirectas y propagación de erroresDocument11 pagesMediciones indirectas y propagación de erroresEsteban Quito Jurado GutierrezNo ratings yet
- Trazado Del Alabe de Un Rotor RadialDocument8 pagesTrazado Del Alabe de Un Rotor RadialIsabel Pij Valenzuela MendozaNo ratings yet
- Acu Ptar MacariDocument54 pagesAcu Ptar MacariJulio GonzalesNo ratings yet
- Laboratorio de pérdidas por fricción en tuberíasDocument11 pagesLaboratorio de pérdidas por fricción en tuberíasBeth SalcedoNo ratings yet
- Laboratorio 1 de Fisica PDFDocument142 pagesLaboratorio 1 de Fisica PDFLaura SofíaNo ratings yet
- Tenciones AdmisiblesDocument11 pagesTenciones AdmisiblesFatima Romero AracenaNo ratings yet
- Calculo de PresionDocument6 pagesCalculo de PresionjoseNo ratings yet
- Metrado Plaza 28 de AgostoDocument2 pagesMetrado Plaza 28 de AgostoJeanzitOw Del MalNo ratings yet
- Factores Conversion LongitudDocument4 pagesFactores Conversion LongitudcazaangelesNo ratings yet
- Calculo de TraficoDocument12 pagesCalculo de TraficoEdwin Montenegro DiazNo ratings yet
- Problemas de momentos mecánicosDocument2 pagesProblemas de momentos mecánicosArt EcNo ratings yet
- Laboratorio 2 de Mecanica de Fluidos 2.0Document28 pagesLaboratorio 2 de Mecanica de Fluidos 2.0Alexander VillalbaNo ratings yet
- Segunda Ley de NewtonDocument11 pagesSegunda Ley de NewtonDavid SaucedoNo ratings yet
- Conversión de UnidadesDocument4 pagesConversión de UnidadescarloNo ratings yet
- Ejercicios de Meca 7 y 8Document3 pagesEjercicios de Meca 7 y 8Pepe RazonesNo ratings yet
- Diagrama de Fuerzas Cortantes y Momentos FlexionantesDocument6 pagesDiagrama de Fuerzas Cortantes y Momentos FlexionantesLili AdfghfghNo ratings yet
- Matemática II: Integrales Indefinidas y DefinidasDocument6 pagesMatemática II: Integrales Indefinidas y DefinidasManuel Christian Aguilar OrtizNo ratings yet
- Cálculo de Rendimiento de Cisterna y CompactadoraDocument17 pagesCálculo de Rendimiento de Cisterna y CompactadoraAna Laura Rios CayojaNo ratings yet
- Carrocerias (RD 4848 2006 MTC)Document23 pagesCarrocerias (RD 4848 2006 MTC)Ricardo ZanTorNo ratings yet
- Trabajo Bonila Reparado - 1Document37 pagesTrabajo Bonila Reparado - 1LestrikNo ratings yet
- Proyecto 16 Niveles + 4 SotanosDocument16 pagesProyecto 16 Niveles + 4 SotanosCesar Paul Purihuaman MoraNo ratings yet
- 04 Diseño de Camara Rompe PresDocument3 pages04 Diseño de Camara Rompe PresWilliams Urrutia CamposNo ratings yet
- Ficha Catastro Sumideros DOH PDFDocument1 pageFicha Catastro Sumideros DOH PDFalicargraNo ratings yet
- Problemario Cap 3Document4 pagesProblemario Cap 3Losé WoldanNo ratings yet
- Freno aceite cañón ecuaciones movimientoDocument3 pagesFreno aceite cañón ecuaciones movimientoKenneth Jose Romero RodriguezNo ratings yet
- L-3 Mi-7-9 M-3Document15 pagesL-3 Mi-7-9 M-3andesonNo ratings yet
- Cinemática de RobotsDocument90 pagesCinemática de RobotsFabricioNo ratings yet
- Temario FisicaDocument27 pagesTemario FisicaAntonio YumanNo ratings yet
- Suma de vectores: métodos gráficos y analíticosDocument6 pagesSuma de vectores: métodos gráficos y analíticosRogelio ManillaNo ratings yet
- Método del triángulo para sumar vectoresDocument13 pagesMétodo del triángulo para sumar vectoresEli SuarezNo ratings yet
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaFrom EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaNo ratings yet
- Diseño Sistema Riego INIA 1Document9 pagesDiseño Sistema Riego INIA 1カウンターストライク レイヴンNo ratings yet
- Moldes fundiciónDocument8 pagesMoldes fundiciónhack68No ratings yet
- Vías Urbanas (Modo de Compatibilidad)Document38 pagesVías Urbanas (Modo de Compatibilidad)Daniel A. Guevara Aristizábal100% (1)
- Lab. de Accionamiento Nro4 2011Document11 pagesLab. de Accionamiento Nro4 2011Juan Orihuela EnriquezNo ratings yet
- TAREA 4 de TECNOLOGIA Plicada A Los NegociosDocument7 pagesTAREA 4 de TECNOLOGIA Plicada A Los NegociosrichardNo ratings yet
- SENA Excel 2010Document3 pagesSENA Excel 2010Augusto OrtizNo ratings yet
- Informe de Nivelacion Cerrada-CapecoDocument28 pagesInforme de Nivelacion Cerrada-CapecoDiego BravoNo ratings yet
- 10 1Document3 pages10 1Jefferson EndaraNo ratings yet
- Trabajo Final Jabon DepiladorDocument8 pagesTrabajo Final Jabon DepiladorAnonymous bzABASP0% (1)
- Tanques de Lavado: Separación de Agua y PetróleoDocument2 pagesTanques de Lavado: Separación de Agua y PetróleoPablo TapiaNo ratings yet
- Electronica Industrial y de Potencia 4Document6 pagesElectronica Industrial y de Potencia 4Pedro NuñezNo ratings yet
- Ficha Tecnica Adoquin Diamante 15 X 15 X 8Document1 pageFicha Tecnica Adoquin Diamante 15 X 15 X 8Paco Casillas AstorgaNo ratings yet
- Atenuadores Terminal AireDocument15 pagesAtenuadores Terminal AireRo Saul CohenNo ratings yet
- Catálogo GeneralDocument166 pagesCatálogo GeneralMartaSerranoRuizNo ratings yet
- Analicen Las Fuentes de Poder A Disposición de Caruso para Dirigir A Los DecoradoresDocument3 pagesAnalicen Las Fuentes de Poder A Disposición de Caruso para Dirigir A Los DecoradoresMagnolia CarreñoNo ratings yet
- Arte Final2014nocheDocument187 pagesArte Final2014nocheMario QuirozNo ratings yet
- METODO FETKOVICH ecuación presión yacimientos gasDocument3 pagesMETODO FETKOVICH ecuación presión yacimientos gasjose luis pachecoNo ratings yet
- Problemas Mv. CircularDocument2 pagesProblemas Mv. CircularGabi De FilippisNo ratings yet
- Practica e 1Document6 pagesPractica e 1juan manuelNo ratings yet
- AcometidasDocument27 pagesAcometidasandres sain novoaNo ratings yet
- Certificacion de Productos y Certificación de SistemasDocument5 pagesCertificacion de Productos y Certificación de SistemasBeto PerezNo ratings yet
- Equivalente ArenaDocument4 pagesEquivalente ArenaSebastián CamachoNo ratings yet
- Propiedades y ensayos de ladrillos de arcillaDocument35 pagesPropiedades y ensayos de ladrillos de arcillaOscar Armando Mamani NinaNo ratings yet
- Simbologia Diagramas EléctricosDocument73 pagesSimbologia Diagramas EléctricosTALCA VICENTE ANDRE BRAVO MORAGANo ratings yet
- Cálculo de cantidades de obra para muro perimetral de 100mDocument6 pagesCálculo de cantidades de obra para muro perimetral de 100mNaghely Valeria Jaita BravoNo ratings yet
- M4Ns/ M4Ys: Medidor Digital Con Preescalas Alimentado Por Lazo DIN W48 H24mm, W72 H36mm CaracterísticasDocument4 pagesM4Ns/ M4Ys: Medidor Digital Con Preescalas Alimentado Por Lazo DIN W48 H24mm, W72 H36mm CaracterísticasMICHAEL ANDRES HERNANDEZ ORTIZNo ratings yet
- Manual Mindjet Mindmanager6 1233189050922765 3Document22 pagesManual Mindjet Mindmanager6 1233189050922765 3Juan Carlos Hernandez CriadoNo ratings yet
- Qué Es Un DataWindowChildDocument41 pagesQué Es Un DataWindowChildMaria Aranda ZavalaNo ratings yet
- LAB2 ElectDocument27 pagesLAB2 ElectAndres valdezNo ratings yet
- Linea de TiempoDocument4 pagesLinea de TiempoJair AguileraNo ratings yet