You might also like
- VectorsDocument30 pagesVectorsbd87glNo ratings yet
- 1.HIGH School V GEOMETRY-Vectors in The Plane-Part 1Document6 pages1.HIGH School V GEOMETRY-Vectors in The Plane-Part 1Nenad JanicijevicNo ratings yet
- Dynamics NotesDocument122 pagesDynamics NotesMahmoud SammyNo ratings yet
- 19vectors 3d PDFDocument8 pages19vectors 3d PDFSunita MauryaNo ratings yet
- Vectors, Rectilinear and Projectile Motion TutorialDocument12 pagesVectors, Rectilinear and Projectile Motion TutorialIndian AndroidsNo ratings yet
- CHAPTER 1 MaaDocument11 pagesCHAPTER 1 Maasisinamimi62No ratings yet
- ENG1091 Lectures NotesDocument157 pagesENG1091 Lectures NotesFook Loon ChowNo ratings yet
- Physics SampleDocument3 pagesPhysics SampleSoham GhoshNo ratings yet
- Maths Hpas-2017 Main Paper I Q2-Q3Document5 pagesMaths Hpas-2017 Main Paper I Q2-Q3sanjayb1976gmailcomNo ratings yet
- Vector AlgebraDocument4 pagesVector AlgebraMd Ahsan HalimiNo ratings yet
- 71 VECTOR & 3D PART 4 of 6 PDFDocument18 pages71 VECTOR & 3D PART 4 of 6 PDFwill bellNo ratings yet
- 1 Vectors: 1.1 Scalars and Vectors (Riley 7.1)Document11 pages1 Vectors: 1.1 Scalars and Vectors (Riley 7.1)Roy VeseyNo ratings yet
- Lecture03 P1Document24 pagesLecture03 P1Vy BuiNo ratings yet
- Grade 12 LM General Physics 1 Module3Document16 pagesGrade 12 LM General Physics 1 Module3Josue NaldaNo ratings yet
- Particle Kinematics Rect Motion 1Document10 pagesParticle Kinematics Rect Motion 1Dídimo GomesNo ratings yet
- - ملخص متجاهات مهم (extract1) PDFDocument20 pages- ملخص متجاهات مهم (extract1) PDFMohammed QasimNo ratings yet
- VectorsDocument24 pagesVectorscokoNo ratings yet
- Text (Vector Space)Document15 pagesText (Vector Space)colindanielblassingameNo ratings yet
- Exact 3d Navier Stokes Solutions For Benchmarking PDFDocument7 pagesExact 3d Navier Stokes Solutions For Benchmarking PDFlefriyekh achrafNo ratings yet
- VectorsDocument9 pagesVectorsImash MinokaNo ratings yet
- Ch-1 EditedDocument66 pagesCh-1 Editedhamimmuhammedadem0579No ratings yet
- Pendahuluan VektorDocument25 pagesPendahuluan Vektorsalsa bilaNo ratings yet
- CH 03Document23 pagesCH 03陳凱倫No ratings yet
- Chapter 3: Vector Algebra: 3.1 Introduction To Vector AnalysisDocument20 pagesChapter 3: Vector Algebra: 3.1 Introduction To Vector AnalysisGolden ChanNo ratings yet
- Problems 1Document3 pagesProblems 1Alberto Ramírez MurcianoNo ratings yet
- Vectors IllustrationDocument4 pagesVectors IllustrationReem Amr El-DafrawiNo ratings yet
- And Electric Field: Equal ToDocument5 pagesAnd Electric Field: Equal ToAli HassenNo ratings yet
- Lecture 2 Review Linear Algebra For ORDocument43 pagesLecture 2 Review Linear Algebra For ORsharef albarak100% (1)
- HW 5 AnsDocument5 pagesHW 5 AnsAshish BodeleNo ratings yet
- Electromagnetic Theory MCQ (1) - Removed (1) - WatermarkDocument278 pagesElectromagnetic Theory MCQ (1) - Removed (1) - WatermarkNEROB KUMAR MOHONTO XRLNZGkUXmNo ratings yet
- Flow ExercisesDocument40 pagesFlow ExercisesManon VerhoevenNo ratings yet
- Homework 0Document6 pagesHomework 0jerryNo ratings yet
- Assignment 1 VectorDocument2 pagesAssignment 1 VectorPrajwal Dhananjay JadhavNo ratings yet
- Chapter 10 - Vector and Geometry SpaceDocument66 pagesChapter 10 - Vector and Geometry SpaceRiyad MohammedNo ratings yet
- Classical Mechanics (Part 1 of PHYS214) - 2021 Homework Problem Set #1Document4 pagesClassical Mechanics (Part 1 of PHYS214) - 2021 Homework Problem Set #1Khensani MakhubeleNo ratings yet
- Equation of Lines and Planes - Onlineclassmaterial - March4Document29 pagesEquation of Lines and Planes - Onlineclassmaterial - March4Samuel ChristianNo ratings yet
- MA2104 Notes PDFDocument35 pagesMA2104 Notes PDFRobert FisherNo ratings yet
- 2015 BoS Trials Mathematics Extension 1 SolutionsDocument22 pages2015 BoS Trials Mathematics Extension 1 SolutionsKowsik LakshmananNo ratings yet
- Physics 1.2 Scalars and Vectors: ScalarDocument15 pagesPhysics 1.2 Scalars and Vectors: Scalarps_daNo ratings yet
- STEM6B Module2 Derivatives and DifferentiationDocument15 pagesSTEM6B Module2 Derivatives and DifferentiationShifra Jane PiqueroNo ratings yet
- Module 1 - Review of Vector Differential CalculusDocument11 pagesModule 1 - Review of Vector Differential CalculusHarris LeeNo ratings yet
- Linear Algebra Assignment HelpDocument14 pagesLinear Algebra Assignment Helpmathsassignmenthelp100% (1)
- NM - Vectors and Scalars - Lesson ADocument34 pagesNM - Vectors and Scalars - Lesson Ajohn jkillerzsNo ratings yet
- HW02 Sol - KNN DTDocument8 pagesHW02 Sol - KNN DTghukasyans033No ratings yet
- This Study Resource Was: MCV4U Exam ReviewDocument9 pagesThis Study Resource Was: MCV4U Exam ReviewNathan WaltonNo ratings yet
- OverviewDocument34 pagesOverviewApple LiuNo ratings yet
- Pursuit CurvesDocument18 pagesPursuit CurvesmegustalazorraNo ratings yet
- Kinematics in One DimensionDocument31 pagesKinematics in One DimensionShipsGonnaSailNo ratings yet
- Electromagnetic Theory MCQDocument278 pagesElectromagnetic Theory MCQSatwik DasNo ratings yet
- Typeset by AMS-TEX 1Document6 pagesTypeset by AMS-TEX 1Satish MishraNo ratings yet
- Objectives: Review Vectors, Dot Products, Cross Products, RelatedDocument12 pagesObjectives: Review Vectors, Dot Products, Cross Products, Relatedbstrong1218No ratings yet
- Math 415 - Lecture 9: 1 Inverse of A Matrix (CNTD.)Document8 pagesMath 415 - Lecture 9: 1 Inverse of A Matrix (CNTD.)박창훈No ratings yet
- NP Tel ProblemsDocument18 pagesNP Tel ProblemsSreedevi KrishnakumarNo ratings yet
- Topic 5 Linear Combination Linear Dependence Spanning, Orthogonal-WordDocument12 pagesTopic 5 Linear Combination Linear Dependence Spanning, Orthogonal-Wordwendykuria3No ratings yet
- Bab 3 Vectors r2 r3 PDFDocument41 pagesBab 3 Vectors r2 r3 PDFLailatul MaghfirohNo ratings yet
- Kunci-Jawaban Howard AntonDocument41 pagesKunci-Jawaban Howard AntonAlyagariniNo ratings yet
- 2-D Motion Adv WSDocument9 pages2-D Motion Adv WSNoah SegalNo ratings yet
- LA Part1 2in1Document166 pagesLA Part1 2in1闇玥No ratings yet
- Multivariable Calculus ENGG 1130 hw2Document3 pagesMultivariable Calculus ENGG 1130 hw2James LiNo ratings yet
- Quiz05 Div1 SolnDocument1 pageQuiz05 Div1 Solnme2742700No ratings yet
- ME 274 - Spring 2009 Solution Quiz No. 4 - Div 3 Monday, February 9Document1 pageME 274 - Spring 2009 Solution Quiz No. 4 - Div 3 Monday, February 9me2742700No ratings yet
- Quiz05 Div3 SolnDocument1 pageQuiz05 Div3 Solnme2742700No ratings yet
- Exam01 SolnDocument5 pagesExam01 Solnme2742700No ratings yet
- ME 274 - Spring 2009 Solution Quiz No. 4 - Div 1 Monday, February 9Document1 pageME 274 - Spring 2009 Solution Quiz No. 4 - Div 1 Monday, February 9me2742700No ratings yet
- Quiz03 Div3 SolnDocument2 pagesQuiz03 Div3 Solnme2742700No ratings yet
- Particle KineticsDocument20 pagesParticle Kineticsme2742700No ratings yet
- FE CoverDocument1 pageFE Coverme2742700No ratings yet
- Quiz03 Div1 SolnDocument2 pagesQuiz03 Div1 Solnme2742700No ratings yet
- Quiz02 Div3 SolnDocument1 pageQuiz02 Div3 Solnme2742700No ratings yet
- Quiz02 Div1 SolnDocument1 pageQuiz02 Div1 Solnme2742700No ratings yet
- FE StatisticsDocument1 pageFE Statisticsme2742700No ratings yet
- Quiz01 Div3 SolnDocument1 pageQuiz01 Div3 Solnme2742700No ratings yet
- Fundamentals SolnDocument5 pagesFundamentals Solnme2742700No ratings yet
- KinematicsDocument27 pagesKinematicsme2742700No ratings yet
- Sample ExamsDocument24 pagesSample Examsme2742700100% (1)
- Exam InfoDocument1 pageExam Infome2742700No ratings yet
- Homework FormatDocument1 pageHomework Formatme2742700No ratings yet
- ME 274 - Fall 2008 Solution Final Examination Problem No. 1 GivenDocument16 pagesME 274 - Fall 2008 Solution Final Examination Problem No. 1 Givenme2749529No ratings yet
- Here Is Why Skincare Is ImportantDocument3 pagesHere Is Why Skincare Is ImportantKevin OkunguNo ratings yet
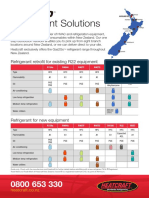
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentDocument2 pagesRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoNo ratings yet
- AD&D - Forgotten Realms - Menzoberranzan - EXTRAS - House Do'Urden RestrospectiveDocument16 pagesAD&D - Forgotten Realms - Menzoberranzan - EXTRAS - House Do'Urden RestrospectiveThiago RaulinoNo ratings yet
- Barilla SpaDocument11 pagesBarilla Spavariapratik100% (1)
- Analisis Keterampilan Berpikir Kritis Mahasiswa Pada Materi KinematikaDocument11 pagesAnalisis Keterampilan Berpikir Kritis Mahasiswa Pada Materi KinematikaTrisnaNo ratings yet
- 8v92ta DetroitDocument554 pages8v92ta Detroit10000389% (9)
- Green Engine 2 PDFDocument7 pagesGreen Engine 2 PDFharivardhanNo ratings yet
- Electricity and MagnetismDocument29 pagesElectricity and MagnetismNashrul HaqNo ratings yet
- Conduit 5Document42 pagesConduit 5dediNo ratings yet
- Ar ExportsDocument1 pageAr ExportsRais AlamNo ratings yet
- Bài 1: Fill in The Blank With Present Simple, Present Continuous or Past SimpleDocument6 pagesBài 1: Fill in The Blank With Present Simple, Present Continuous or Past SimplePhương Anh Đỗ NgọcNo ratings yet
- Rajiv Gandhi University of Health Sciences Exam Result: PrintDocument1 pageRajiv Gandhi University of Health Sciences Exam Result: PrintAbhi NavNo ratings yet
- IPC 4552 Cuprins - ENIG PDFDocument3 pagesIPC 4552 Cuprins - ENIG PDFMarlon CornejoNo ratings yet
- Reproduction WorksheetDocument5 pagesReproduction WorksheetJENY VEV GAYOMANo ratings yet
- (Q2) Electrochemistry 29th JulyDocument21 pages(Q2) Electrochemistry 29th JulySupritam KunduNo ratings yet
- ASTM A581 A581M-95bDocument3 pagesASTM A581 A581M-95bFeteneNo ratings yet
- Hydrostatic, Deviatoric StressesDocument7 pagesHydrostatic, Deviatoric StressespanbuNo ratings yet
- Aluminum Alloy 6351 T6 Sheet SuppliersDocument10 pagesAluminum Alloy 6351 T6 Sheet Supplierssanghvi overseas incNo ratings yet
- Vital Judo Throwing TechniquesDocument193 pagesVital Judo Throwing TechniquesJuan Jose Opazo Carvajal100% (1)
- Presentation On Anther Culture: Submitted To Submitted byDocument22 pagesPresentation On Anther Culture: Submitted To Submitted byvishnu0751No ratings yet
- Vargas, Bartolome Dr. Thornton, Karen 17675251Document1 pageVargas, Bartolome Dr. Thornton, Karen 17675251ahmedNo ratings yet
- Rightship Ship Inspection Questionnaire RISQDocument177 pagesRightship Ship Inspection Questionnaire RISQИгорь100% (3)
- Identifying - Explaining Brake System FunctionsDocument39 pagesIdentifying - Explaining Brake System FunctionsJestoni100% (1)
- The Greek LettersDocument18 pagesThe Greek LettersSupreet GuptaNo ratings yet
- Chapter 4 TurbineDocument56 pagesChapter 4 TurbineHabtamu Tkubet EbuyNo ratings yet
- Exact Solution Tank DrainageDocument8 pagesExact Solution Tank DrainageFelipe CastNo ratings yet
- Correlation of Body Mass Index With Endometrial Histopathology in Abnormal Uterine BleedingDocument101 pagesCorrelation of Body Mass Index With Endometrial Histopathology in Abnormal Uterine BleedingpritamNo ratings yet
- Caeneus and PoseidonDocument77 pagesCaeneus and PoseidonSabrina CareyNo ratings yet
- MÁY 5 Service Manual Bellavista 1000 V16 08Document126 pagesMÁY 5 Service Manual Bellavista 1000 V16 08Huế TrầnNo ratings yet
- Omyacarb 1t TNDocument1 pageOmyacarb 1t TNGİZEM DEMİRNo ratings yet