You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- What Is EthnographyDocument14 pagesWhat Is Ethnographyfred65No ratings yet
- Essay WritingDocument10 pagesEssay Writingkhenna maeNo ratings yet
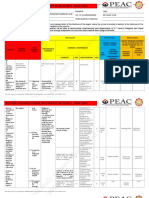
- This Study Resource Was Shared Via: Flexible Instructional Delivery Plan (Fidp) 2020-2021Document5 pagesThis Study Resource Was Shared Via: Flexible Instructional Delivery Plan (Fidp) 2020-2021Sa Le HaNo ratings yet
- Digital Marketing of Amazon (Ritesh)Document55 pagesDigital Marketing of Amazon (Ritesh)UDAYA KUMAR MANDAL100% (7)
- AI Innovation For Advancing Public Service: The Case of China's First Administrative Approval BureauDocument9 pagesAI Innovation For Advancing Public Service: The Case of China's First Administrative Approval BureauDaniela Gabriela CazanNo ratings yet
- Uji Hipotesis Rata-Rata 2 PopulasiDocument4 pagesUji Hipotesis Rata-Rata 2 PopulasitestingNo ratings yet
- Culture V LawDocument48 pagesCulture V LawMarvin TumwesigyeNo ratings yet
- Thesis Ra 9262Document5 pagesThesis Ra 9262ashleyjonesjackson100% (2)
- PMP - Sample Application - With Demo DataDocument12 pagesPMP - Sample Application - With Demo DataGazi MahmudNo ratings yet
- Conference Proceedings RECCNI2012Document687 pagesConference Proceedings RECCNI2012Atiejay JuharyNo ratings yet
- Sourav Bhuiyan Development of Sports LawDocument52 pagesSourav Bhuiyan Development of Sports LawLeo SouravNo ratings yet
- Character Education and Nationalism in Learning DevelopmentDocument9 pagesCharacter Education and Nationalism in Learning DevelopmentFriska Adelia SariNo ratings yet
- The Problem and Purpose StatementDocument19 pagesThe Problem and Purpose Statementnour fouaniNo ratings yet
- Nursing Attitudes and BeliefsDocument5 pagesNursing Attitudes and Beliefsyovanimanuel imanuelNo ratings yet
- Campbell 2020Document10 pagesCampbell 2020Eikhwan AliNo ratings yet
- Cooperatives and Local DevelopmentDocument4 pagesCooperatives and Local DevelopmentMaria TeodoraNo ratings yet
- Lesson 4-7Document79 pagesLesson 4-7marivic franciscoNo ratings yet
- Research Papers On Database Management SystemDocument6 pagesResearch Papers On Database Management Systemafeayaczb100% (1)
- Quiz 11Document7 pagesQuiz 11Melodia Turqueza GandezaNo ratings yet
- Factors Affecting Academic Performance of Science StudentsDocument52 pagesFactors Affecting Academic Performance of Science StudentsGODSWILL EMMANUELNo ratings yet
- Social InequalityDocument20 pagesSocial InequalityjosezawadskyNo ratings yet
- Research Paper On Physical Activity and Fitness Patterns Among University Students in MumbaiDocument9 pagesResearch Paper On Physical Activity and Fitness Patterns Among University Students in MumbaiShubhamNo ratings yet
- Pedagogy and Philosophy of Educational PsyhcologyDocument8 pagesPedagogy and Philosophy of Educational PsyhcologymunirjssipgkperlisgmNo ratings yet
- MALE8411 - Assignment 1 17062883 SM BotesDocument19 pagesMALE8411 - Assignment 1 17062883 SM BotesSheldon BotesNo ratings yet
- Precursors To Measuring Outcomes in Clinical Supervision: A Thematic AnalysisDocument7 pagesPrecursors To Measuring Outcomes in Clinical Supervision: A Thematic Analysisapi-626497212No ratings yet
- Course End Survey DS - B SECDocument3 pagesCourse End Survey DS - B SECSobhan DasariNo ratings yet
- A Mini Project ThesisDocument56 pagesA Mini Project ThesisHan SaNo ratings yet
- The Final Main ThesisDocument85 pagesThe Final Main ThesisGetnete degemuNo ratings yet
- G4 Ensayo 4Document10 pagesG4 Ensayo 4Jorge PrietoNo ratings yet
- A Decade of Foreign Language Standards (Impact, Influence and Future Directions) PDFDocument18 pagesA Decade of Foreign Language Standards (Impact, Influence and Future Directions) PDFfranciscogarridoNo ratings yet