International Journal of Modern Engineering Research (IJMER) www.ijmer.com Vol.2, Issue.6, Nov-Dec.
2012 pp-4215-4219 ISSN: 2249-6645
During Damping of Low Frequency Oscillations in Power Systems with Fuzzy UPFC Controller
M.Bala Ankanna, 1 K.Harinath Reddy, 2
M.Tech (EPE), Department of EEE, AITS, Rajampet, A.P, Assistant Professor, Department of EEE, AITS, Rajampet, A.P,
Abstract: Low Frequency Oscillations (LFO) occur in
power systems because of lack of the damping torque in order to dominance to power system disturbances as an example of change in mechanical input power. In the recent past Power System Stabilizer (PSS) was used to damp LFO. FACTs devices, such as Unified Power Flow Controller (UPFC), can control power flow, reduce sub-synchronous resonance and increase transient stability. So UPFC may be used to damp LFO instead of PSS. UPFC damps LFO through direct control of voltage and power. A comprehensive and systematic approach for mathematical modelling of UPFC for steady-state and small signal (linearize) dynamic studies has been proposed. The other modified linearize Heffron-Philips model of a power system installed with UPFC is presented. For systems which are without power system stabilizer (PSS), excellent damping can be achieved via proper controller design for UPFC parameters. By designing a suitable UPFC controller, an effective damping can be achieved. In this research the linearize model of synchronous machine (Heffron-Philips) connected to infinite bus (Single Machine-Infinite Bus: SMIB) with UPFC is used and also in order to damp LFO, adaptive neuro-fuzzy controller for UPFC is designed and simulated. Simulation is performed for various types of loads and for different disturbances. Simulation results show good performance of neuro-fuzzy controller in damping LFO.
Keywords: Neuro-Fuzzy Controller, Low Frequency Oscillations (LFO), Unified Power Flow Controller (UPFC), Single Machine-Infinite Bus (SMIB)
I. INTRODUCTION Flexible AC Transmission Systems, called FACTS, got in the recent years a well known term for higher controllability in power systems by means of power electronic devices. Several FACTS-devices have been introduced for various applications worldwide. A number of new types of devices are in the stage of being introduced in practice. In most of the applications the controllability is used to avoid cost intensive or landscape requiring extensions of power systems, for instance like upgrades or additions of substations and power lines. FACTS-devices provide a better adaptation to varying operational conditions and improve the usage of existing installations. The basic applications of FACTS-devices are: (i).Power flow control, (ii) Increase of transmission capability, (iii) Voltage control, (iv)Reactive power compensation, (v)Stability improvement, (vi) Power quality improvement, (vii)Power conditioning, (viii)Flicker mitigation, (ix)Interconnection of renewable and distributed generation and storages. The development of FACTS-devices has started with the growing capabilities of power electronic
components. Devices for high power levels have been made available in converters for high and even highest voltage levels. The growth of the demand for electrical energy leads to loading the transmission system near their limits. Thus, the occurrence of the LFO has increased. FACTs Controllers has capability to control network conditions quickly and this feature of FACTs can be used to improve power system stability. The UPFC is a FACTS device that can be used to the LFO. The primarily use of UPFC is to control the power flow in power systems. The UPFC consists of two voltage source converters (VSC) each of them has two control parameters namely me, e ,mb and b [3]. The UPFC used for power flow control, enhancement of transient stability, mitigation of system oscillations and voltage regulation [3]. A comprehensive and systematic approach for mathematical modelling of UPFC for steadystate and small signal (linearized) dynamic studies has been proposed in [4-7]. The other modified linearized HeffronPhilips model of a power system installed with UPFC is presented in [8] and [9]. For systems which are without power system stabilizer (PSS), excellent damping can be achieved via proper controller design for UPFC parameters. By designing a suitable UPFC controller, an effective damping can be achieved. It is usual that Heffron-Philips model is used in power system to study small signal stability. This model has been used for many years providing reliable results [10]. In recent years, the study of UPFC control methods has attracted attentions so that different control approaches are presented for UPFC control such as Fuzzy control [11-14], conventional lead-lag control [15], Genetic algorithm approach [16], and Robust control methods [17-19]. In this case study, the class of adaptive networks that of the same as fuzzy inference system in terms of performance is used. The controller utilized with the above structure is called Adaptive Neuro Fuzzy Inference System or briefly ANFIS [20]. Applying neural networks has many advantages such as the ability of adapting to changes, fault tolerance capability, recovery capability, High-speed processing because of parallel processing and ability to build a DSP chip with VLSI Technology. To show performance of the designed adaptive neuro-fuzzy controller, a conventional lead-lag controller that is designed in [15] is used and the simulation results for the power system including these two controllers are compared with each other.
II. MODEL OF THE POWER SYSTEM INCLUDING UPFC
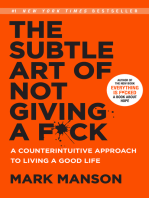
UPFC is one of the famous FACTs devices that is used to improve power system stability. Fig.1 shows a single machine- infinite-bus (SMIB) system with UPFC. It is assumed that the UPFC performance is based on pulse 4215 | Page
www.ijmer.com
International Journal of Modern Engineering Research (IJMER) www.ijmer.com Vol.2, Issue.6, Nov-Dec. 2012 pp-4215-4219 ISSN: 2249-6645 width modulation (PWM) converters. In figure 1 me, mb and e, b are the amplitude modulation ratio and phase angle of the reference voltage of each voltage source converter respectively. These values are the input control signals of the UPFC. each inverter can independently generate (or absorb) reactive power at its own ac output terminal. Inverter 2 provides the main function of the UPFC by injecting an ac voltage Vpq with controllable magnitude Vpq (0VpqVpqmax) and phase angle (0360), at the power frequency, in series with the line via an insertion transformer. The injected voltage is considered essentially as a synchronous voltage source. The transmission line current flows through this voltage source resulting in real and reactive power exchange between it and the ac system. The real power exchanged at the ac terminal (i.e., at the terminal of insertion transformer) is converted by the inverter into dc power that appears at the dc link as positive or negative real power demanded. The reactive power exchanged at the ac terminal is generated internally by the inverter. The basic function of inverter 1 is to supply or absorb the real power demanded by Inverter 2 at the common dc link. This dc link power is converted back to ac and coupled to the transmission line via a shunt-connected transformer. Inverter 1 can also generate or absorb controllable reactive power, if it is desired, and there by it can provide independent shunt reactive compensation for the line. It is important to note that where as there is a closed direct path for the real power negotiated by the action of series voltage injection through Inverters 1 and 2 back to the line, the corresponding reactive power exchanged is supplied or absorbed locally by inverter 2 and therefore it does not flow through the line. Thus, Inverter 1 can be operated at a unity power factor or be controlled to have a reactive power exchange with the line independently of the reactive power exchanged by the Inverter 2. This means there is no continuous reactive power flow through UPFC. Operation of the UPFC from the standpoint of conventional power transmission based on reactive shunt compensation, series compensation, and phase shifting, the UPFC can fulfill these functions and thereby meet multiple control objectives by adding the injected voltage Vpq, with appropriate amplitude.
Fig.1 A single machine connected to infinite bus with UPFC As it mentioned previously, a linearized model of the power system is used in dynamic studies of power system. In order to consider the effect of UPFC in damping of LFO, the dynamic model of the UPFC is employed; In this model the resistance and transient of the transformers of the UPFC can be ignored. The Linearized state variable equations of the power system equipped with the UPFC can be represented as [8].
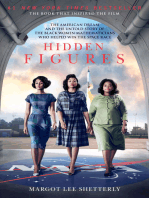
Where mE, mB , E and B are the deviation of input control signals of the UPFC. Also in this study IEEE TypeST1A excitation system was used. III. OPERATING PRINCIPLE OF UPFC In the presently used practical implementation, The UPFC consists of two switching converters, which in the implementations considered are voltage source inverters using gate turn-off (GTO) thyristor valves, as illustrated in the Fig 2.1. These back to back converters labeled Inverter 1 and Inverter 2 in the figure are operated from a common dc link provided by a dc storage capacitor.
Fig2.Principle configuration of an UPFC The UPFC consists of a shunt and a series transformer, which are connected via two voltage source converters with a common DC-capacitor. The DC-circuit allows the active power exchange between shunt and series transformer to control the phase shift of the series voltage. This setup, as shown in Figure 1.21, provides the full controllability for voltage and power flow. The series converter needs to be protected with a Thyristor bridge. Due to the high efforts for the Voltage Source Converters and the protection, an UPFC is getting quite expensive, which limits the practical applications where the voltage and power flow control is required simultaneously.
Fig. Basic circuit arrangement of unified power flow controller This arrangement functions as an ac to ac power converter in which the real power can freely flow in either direction between the ac terminals of the two inverters and
www.ijmer.com
4216 | Page
International Journal of Modern Engineering Research (IJMER) www.ijmer.com Vol.2, Issue.6, Nov-Dec. 2012 pp-4215-4219 ISSN: 2249-6645 IV. CONTROLLER DESIGN I. Lead-Lag Controller Design As mentioned before, in this study two different controllers have been used to damp LFO. The first one is conventional lead-lag controller. It consists of gain block, washout block, lead-lag compensator block. The washout block is considered as a high-pass filter, with the time constant TW. Without this block steady changes in input would modify the output. The value of TW is not critical and may be in the range of 1 to 20 seconds. In this study, the parameters obtained from lead-lag controller design that is presented in [15], were used. II. Adaptive Neuro-Fuzzy Controller Design Another controller is adaptive neuro-fuzzy controller. In this section, we will present the procedure of designing of the adaptive neuro-fuzzy controller. In this research, the neuro fuzzy controller has 2 inputs that are and and it has 1 output that is f {E, E, B, B }. For each input 20 membership functions and also 20 rules in the rules base is considered. Figure 5 demonstrates the structure of adaptive neuro-fuzzy controller for a sugeno fuzzy model with 2 inputs and 20 rules [20]. combination of linear and nonlinear parameters learning algorithm. Description for learning procedure can be found in [20]. This network is called adaptive by Jang and it is functionally equivalent to Sugeno type of a fuzzy system. It is not a unique presentation.
Figure.2. A fuzzy system defined by a neural network. With regard to the explanations presented and with the help of MATLAB software, adaptive neuro-fuzzy controller can be designed. The rules surface for designed controller is shown in figure 3.
Fig.3 ANFIS architecture for a two-input Sugeno fuzzy model with 20 rules In Figure 3, a Sugeno type of fuzzy system has the rule base with rules such as follows: 1. If is A1 and is B1 then f1=p1 +q1 +r1. 2. If is A2 and is B2 then f2=p2 +q2 +r2. and are the membership functions of fuzzy sets Ai and Bi for i=1,,20. In evaluating the rules, we choose product for T-norm (logical and). Then controller could be designed in following steps: 1. Evaluating the rule premises: = () (), i= 1.....20 (2) 2.Evaluating the implication and the rule consequences: f(, )
=
Fig.3 The rules surface The membership functions for input variable are presented in figure 4.
Fig.4 The membership functions for input variable One of the advantages of using neuro-fuzzy controller is that we can utilize one of the designed controllers for instance me controller in place of the other controllers. While if we use conventional lead-lag controllers, for each control parameters, a controller must be designed. V. SIMULATION RESULTS In this research, two different cases are studied. In the first case mechanical power and in the second case reference voltage has step change and deviation in () and deviation in rotor angle () is observed. The parameter values of system are gathered in Appendix. In first case, step change in mechanical input power is studied. Simulations are performed when mechanical input power has 10% increase (Pm=0.1 pu) at t=1 s. Simulation results for different types of loads and controllers ( mE, E, 4217 | Page
1 , 1 (, )++ 20 ( , ) 20 ( , ) 1( , ) ++ 20( , )
Or leaving the arguments out f
1 1 ++ 20 20
=
1 ++ 20 1 ++ 20
(3)
This can be separated to phases by first defining wi = (4)
These are called normalized firing strengths. Then f can be written as f = w1f1+......+ w20f20 (5) The above relation is linear with respect to pi , qi, ri and i=1,,20. So parameters can be categorized into 2 sets: set of linear parameters and set of nonlinear parameters. Now Hybrid learning algorithm can be applied to obtain values of parameters. Hybrid learning algorithm is
www.ijmer.com
International Journal of Modern Engineering Research (IJMER) www.ijmer.com Vol.2, Issue.6, Nov-Dec. 2012 pp-4215-4219 ISSN: 2249-6645 mB, B ) and step change in mechanical input power are shown in figures 5 to 9. Generator Parameters : M = 2H = 8.0MJ /MVA , D = 0.0, Td0 = 5.044S Xd = 1.0pu , Xq = 0.6 , Xd = 0.3 Exciter (IEEE Type ST1): = 100, TA = 0.01S Reactances: XIE = 0.1 pu , XE = XB =0.1 pu, XBv = 0.3 pu, XE = 0.5 pu Operation Condition: Pe = 0.8 pu, Vt = Vb=1.0 pu UPFC parameters: mE = 0.4013, mB = E = -85.3478 , B = -78.2174 DC link: Vdc = 2 pu, Cdc = 1 pu demonstrates simulation result for step change in reference voltage, under nominal load and for b Controller.
0.0789,
Fig. 10 Response of angular velocity for 5% step change in reference voltage in the case of nominal load (b Controller) Consequently simulation results show that neurofuzzy controller successfully increases damping rate and decreases the amplitude of low frequency oscillations. Results comparison between conventional lead-lag compensator and the proposed neuro-fuzzy controller for the UPFC indicates that the proposed neuro-fuzzy controller has less settling time and less overshoot in comparison with the conventional lead-lag compensator. VI. CONCLUSIONS With regard to UPFC capability in transient stability improvement and damping LFO of power systems, an adaptive neuro-fuzzy controller for UPFC was presented in this paper. The controller was designed for a single machine infinite bus system. Then simulation results for the system including neurofuzzy controller were compared with simulation results for the system including conventional lead-lag controller. Simulations were performed for different kinds of loads. Comparison. showed that the proposed adaptive neuro-fuzzy controller has good ability to reduce settling time and reduce amplitude of LFO. Also we can utilize advantages of neural networks such as the ability of adapting to changes, fault tolerance capability, recovery capability, High-speed processing because of parallel processing and ability to build a DSP chip with VLSI Technology. Fuzzy logic is a convenient way to map an input space to an output space. Mapping input to output is the starting point for everything.
Fig.7 Angular velocity deviation during step change in mechanical input power for nominal load (e Controller)
Fig.8 Angular velocity deviation during step change in mechanical input power for nominal load (mb Controller)
REFERENCES
[1] N. G. Hingorani and L. Gyugyi, Understanding FACTS: Concepts and Technology of Flexible AC Transmission System, IEEE Press, 2000. H.F.Wang, F.J.Swift," A Unified Model for the Analysis of FACTS Devices in Damping Power System Oscillations Part I: Single-machine Infinitebus Power Systems", IEEE Transactions on Power Delivery, Vol. 12, No. 2, April 1997, pp.941-946. L. Gyugyi, C.D. Schauder, S.L. Williams, T.R.Rietman, D.R. Torgerson, A. Edris, "The Unified Power Flow Controller: A New Approach to PowerTransmission Control", IEEE Trans., 1995, pp. 1085-1097. 4218 | Page
Fig.9 Angular velocity deviation during step change in mechanical input power for nominal load (b Controller) As it can be seen from figures 5 to 9, lead-lag controller response is not as good as neuro-fuzzy controller response and also neuro-fuzzy controller decreases settling time. In addition maximum overshoot has decreased in comparison with lead-lag controller response. In second case, simulations were performed when reference voltage has 5% increase (Vref = 0.05 pu) at t=1 s. Figure 10
[2]
[3]
www.ijmer.com
International Journal of Modern Engineering Research (IJMER) www.ijmer.com Vol.2, Issue.6, Nov-Dec. 2012 pp-4215-4219 ISSN: 2249-6645 [4] Wolanki, F. D. Galiana, D. McGillis and G. Joos, Mid-Point Sitting of FACTS Devices in Transmission Lines, IEEE Transactions on Power Delivery, vol. 12, No. 4, 1997, pp. 1717-1722. [5] M. Noroozian, L. Angquist, M. Ghandari, and G. Anderson, Use of UPFC for optimal power flow control, IEEE Trans. on Power Systems, vol. 12, no. 4, 1997, pp. 16291634. [6] A Nabavi-Niaki and M R Iravani. Steady-state and Dynamic Models of Unified Power Flow Controller (UPFC) for Power System Studies. IEEE Transactions on Power Systems, vol 11, 1996, p 1937. [7] K S Smith, L Ran, J Penman. Dynamic Modelling of a Unified Power Flow Controller. IEE ProceedingsC, vol 144, 1997, pp.7. [8] H F Wang. Damping Function of Unified Power Flow Controller. IEE Proceedings-C, vol 146, no 1, January 1999, p 81. [9] H. F. Wang, F. J. Swift, A Unified Model for the Analysis of FACTS Devices in Damping Power System Oscillations Part I: Single-machine Infinitebus Power Systems, IEEE Transactions on Power Delivery, Vol. 12, No. 2, April, 1997, pp. 941-946. [10] P.Kundur,"Power System Stability and Control, McGraw-Hill. [11] M. Banejad, A. M. Dejamkhooy , N. Talebi, " Fuzzy Logic Based UPFC Controller for Damping Low Frequency Oscillations of Power Systems", 2nd IEEE International Conference on Power and Energy, 2008, pp. 85-88. [12] P.K., Dash, S. Mishra, G. Panda, , "Damping multimodal power system oscillation using a hybrid fuzzy controller for series connected FACTS devices", IEEE Trans. on Power Systems, Vol. 15, 2000, pp. 1360 -1366. 13] A. Oudalov, R. Cherkaoui, A.J. Germond, "Application of fuzzy logic techniques for the coordinated power flow control by multiple series FACTS devices", IEEE Power Engineering Society International Conference, 2001, pp. 74 80. [14] Karbalaye Zadeh, M. Khatami, V. Lesani, H. Ravaghi, H. A., " A fuzzy control strategy to damp multi mode oscillations of power system considering UPFC", 8th International Conference on Advances in Power System Control, Operation and Management, 2009, p.1. [15] N. Tambey, M.L. Kothari, Damping of power system oscillations with unified power flow controller (UPFC), IEE Proc.-Gener. Transm. Distrib., Vol. 150, No. 2, March 200. [16] Khan, L. Ahmed, N. Lozano, C., "GA neuro-fuzzy damping control system for UPFC to enhance power system transient stability", 7th International Multi Topic Conf., 2003., pp. 276 282. [17] Ruban Deva Prakash, T. Kesavan Nair, N., "A Robust Control Strategy for UPFC to Improve Transient Stability Using Fuzzy Bang-Bang Control", International Conference on Computational Intelligence and Multimedia Applications, 2007, pp. 352 356. [18] Jang-Cheol Seo Seung-Il Moon Jong-Keun Park JongWoong Choe, " Design of a robust UPFC controller for enhancing the small signal stability in the multimachine power systems", IEEE Power Engineering Society Winter Meeting, 2001, pp. 352-356. [19] Rahim, A.H.M.A. Al-Baiyat, S.A., "A robust damping controller design for a unified power flow controller", 39th International Universities Power Engineering Conference, 2004, pp. 265 269. [20] Jyh-Shing Roger Jang, Chuen-Tsai Sun, Eiji Mizutani, " Neuro-fuzzy and soft computing: a computational approach to learning and machine intelligence", Prentice-Hall, 1997.
www.ijmer.com
4219 | Page
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- PDFDocument19 pagesPDFGabriel Bolívar100% (1)
- MHD Flow of A Non-Newtonian Fluid Through A Circular TubeDocument10 pagesMHD Flow of A Non-Newtonian Fluid Through A Circular TubeIJMERNo ratings yet
- Data Mining For Fraud DetectionDocument4 pagesData Mining For Fraud DetectionIJMERNo ratings yet
- Generating Comparative Analysis of Early Stage Prediction of Chronic Kidney DiseaseDocument7 pagesGenerating Comparative Analysis of Early Stage Prediction of Chronic Kidney DiseaseIJMERNo ratings yet
- Process Design and Development of Electromagnetic Shearing MachineDocument9 pagesProcess Design and Development of Electromagnetic Shearing MachineIJMERNo ratings yet
- Assignment #1 - Themro II - Spring 2024Document3 pagesAssignment #1 - Themro II - Spring 2024Mai DweikatNo ratings yet
- High-Impedance Bus Differential MisoperationDocument10 pagesHigh-Impedance Bus Differential MisoperationNguyen Xuan TungNo ratings yet
- Calculating Board FeetDocument36 pagesCalculating Board FeetLaila Idaloy ArcillasNo ratings yet
- PowerLogic PM5000 Series - METSEPM5310Document3 pagesPowerLogic PM5000 Series - METSEPM5310Cynthia HartmanNo ratings yet
- 73 TMSS 01 R0Document32 pages73 TMSS 01 R0Ibrahim AntarNo ratings yet
- Electrical Inspection ProcedureDocument21 pagesElectrical Inspection ProcedurebernardNo ratings yet
- Lecture 11 Energy Transport With Energy DissipationDocument16 pagesLecture 11 Energy Transport With Energy DissipationFarahin Burhan100% (1)
- Power Plant and Calculations - Questions & Answers On Coal Analysis & Related CalculationsDocument4 pagesPower Plant and Calculations - Questions & Answers On Coal Analysis & Related CalculationsSIPL CPPNo ratings yet
- Free-Fall Practice ProblemsDocument1 pageFree-Fall Practice ProblemsGabriel Muñiz NegrónNo ratings yet
- DAILY LESSON LOG 5E Model SCIENCE 6 Q3Document6 pagesDAILY LESSON LOG 5E Model SCIENCE 6 Q3sandy d amor c. rosales100% (1)
- The Expanding Role of PM Machines in Direct-Drive PDFDocument6 pagesThe Expanding Role of PM Machines in Direct-Drive PDFrakeshee2007No ratings yet
- EIE101R01: Basic Electronics Engineering: Textbook and MaterialsDocument7 pagesEIE101R01: Basic Electronics Engineering: Textbook and MaterialsAdal ArasuNo ratings yet
- Pre Fire Planning QuizDocument2 pagesPre Fire Planning QuizJane MorilloNo ratings yet
- Reducing Losses in Distribution Transformer Using PDFDocument4 pagesReducing Losses in Distribution Transformer Using PDFCamilo ManzoNo ratings yet
- Charging and Discharging of Capacitor in RC CircuitDocument9 pagesCharging and Discharging of Capacitor in RC CircuitdevNo ratings yet
- Science at Work in Basketball Benchmark Rockets - CompressDocument33 pagesScience at Work in Basketball Benchmark Rockets - CompressJaron KungNo ratings yet
- HW Chapter 2Document16 pagesHW Chapter 2Đức Trí NguyễnNo ratings yet
- Physics II: Electromagnetism (PH102) : Subhaditya Bhattacharya Iitg Email:, Office No: EVC 14, Phone: 3558Document23 pagesPhysics II: Electromagnetism (PH102) : Subhaditya Bhattacharya Iitg Email:, Office No: EVC 14, Phone: 3558Simran Radheshyam SoniNo ratings yet
- Air Conditioning ProcessesDocument40 pagesAir Conditioning ProcessesAmerul izwan AmiruddinNo ratings yet
- GS2015 QP Phy yDocument18 pagesGS2015 QP Phy yKanakNo ratings yet
- B7: Applied Thermodynamics: Hilary Term 2018 Richard StoneDocument4 pagesB7: Applied Thermodynamics: Hilary Term 2018 Richard StoneMoemen MetwallyNo ratings yet
- Chapter 1: Matter, Energy, and The Origins of The UniverseDocument62 pagesChapter 1: Matter, Energy, and The Origins of The UniverseStavrogin1881No ratings yet
- Nautical Science Syllabus PDFDocument77 pagesNautical Science Syllabus PDFDevansh TyagiNo ratings yet
- Engsolutions RCB: Seismic Design Code: Colcali-14Document5 pagesEngsolutions RCB: Seismic Design Code: Colcali-14Proyectos Constrwctor sasNo ratings yet
- Induction EMF (With Answers)Document4 pagesInduction EMF (With Answers)Ali AsgerovNo ratings yet
- Resuscitaire RW82-1Document7 pagesResuscitaire RW82-1Alexandra JanicNo ratings yet
- CapacitorDocument12 pagesCapacitoryodioioioiNo ratings yet
- Lab 2 ECADocument7 pagesLab 2 ECAAizan AhmedNo ratings yet