You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Group Case Study Rubric 3Document3 pagesGroup Case Study Rubric 3Saraswathi Asirvatham67% (3)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Sabian Aspect OrbsDocument8 pagesSabian Aspect Orbsellaella13100% (2)
- Dog & Kitten: XshaperDocument17 pagesDog & Kitten: XshaperAll PrintNo ratings yet
- Hydrodynamics, Does The Dolphin Have A Secret?Document8 pagesHydrodynamics, Does The Dolphin Have A Secret?WillC123No ratings yet
- On The Aerodynamic OptimizationDocument13 pagesOn The Aerodynamic Optimization917435001No ratings yet
- Drag Reduction Techniques PDFDocument33 pagesDrag Reduction Techniques PDF917435001No ratings yet
- Propulsive Efficiency of The PDFDocument4 pagesPropulsive Efficiency of The PDF917435001No ratings yet
- Drag Reduction in Turbulent Flows Over Superhydrophobic SurfacesDocument9 pagesDrag Reduction in Turbulent Flows Over Superhydrophobic Surfaces917435001No ratings yet
- Phenotypic Plasticity and Evolution by Genetic Assimilation PDFDocument6 pagesPhenotypic Plasticity and Evolution by Genetic Assimilation PDF917435001No ratings yet
- t8 1 Tavakoli PDFDocument17 pagest8 1 Tavakoli PDF917435001No ratings yet
- Numerical Study On Influential Factors Affecting Drag PDFDocument10 pagesNumerical Study On Influential Factors Affecting Drag PDF917435001No ratings yet
- Shark Skin Drag Reduction PDFDocument7 pagesShark Skin Drag Reduction PDF917435001No ratings yet
- Paper 13 KDocument12 pagesPaper 13 K917435001No ratings yet
- RN SONDER FERTIG tcm63-53364 PDFDocument18 pagesRN SONDER FERTIG tcm63-53364 PDF917435001No ratings yet
- PhdAzmoon Download Free University 92 93 PDFDocument120 pagesPhdAzmoon Download Free University 92 93 PDF917435001No ratings yet
- Turbulent Skin-Friction Drag On A Slender Body of PDFDocument7 pagesTurbulent Skin-Friction Drag On A Slender Body of PDF917435001No ratings yet
- TLT 02-09 Cover StoryDocument8 pagesTLT 02-09 Cover Story917435001No ratings yet
- Optimal Microstructures. Drag Reducing Mechanism of Riblets: Elfriede FriedmannDocument2 pagesOptimal Microstructures. Drag Reducing Mechanism of Riblets: Elfriede Friedmann917435001No ratings yet
- Wing Kinematics Measurement and Aerodynamics of Hovering Droneflies PDFDocument12 pagesWing Kinematics Measurement and Aerodynamics of Hovering Droneflies PDF917435001No ratings yet
- Underwater Behavior Influences Cardiac Variability in PDFDocument7 pagesUnderwater Behavior Influences Cardiac Variability in PDF917435001No ratings yet
- Swimming PDFDocument14 pagesSwimming PDF917435001No ratings yet
- Water-Tunnel Studies of Heat Balance in Swimming Mako Sharks PDFDocument12 pagesWater-Tunnel Studies of Heat Balance in Swimming Mako Sharks PDF917435001No ratings yet
- Optimal Microstructures. Drag Reducing Mechanism of Riblets: Elfriede FriedmannDocument2 pagesOptimal Microstructures. Drag Reducing Mechanism of Riblets: Elfriede Friedmann917435001No ratings yet
- CycleMax IntroDocument13 pagesCycleMax IntroIslam AtefNo ratings yet
- Sheet-Metal Forming Processes: Group 9 PresentationDocument90 pagesSheet-Metal Forming Processes: Group 9 PresentationjssrikantamurthyNo ratings yet
- Chapter 01 What Is Statistics?Document18 pagesChapter 01 What Is Statistics?windyuriNo ratings yet
- Ilovepdf MergedDocument503 pagesIlovepdf MergedHemantNo ratings yet
- Manhole Head LossesDocument11 pagesManhole Head Lossesjoseph_mscNo ratings yet
- Department of Ece, Adhiparasakthi College of Engineering, KalavaiDocument31 pagesDepartment of Ece, Adhiparasakthi College of Engineering, KalavaiGiri PrasadNo ratings yet
- Object Oriented ParadigmDocument2 pagesObject Oriented ParadigmDickson JohnNo ratings yet
- AMS ANALITICA-AIRFLOW TSP-HVS BrochureDocument1 pageAMS ANALITICA-AIRFLOW TSP-HVS BrochureShady HellaNo ratings yet
- EPW, Vol.58, Issue No.44, 04 Nov 2023Document66 pagesEPW, Vol.58, Issue No.44, 04 Nov 2023akashupscmadeeaseNo ratings yet
- The Bio-Based Economy in The NetherlandsDocument12 pagesThe Bio-Based Economy in The NetherlandsIrving Toloache FloresNo ratings yet
- HRM Practices in NepalDocument22 pagesHRM Practices in NepalBodhiNo ratings yet
- CPD - SampleDocument3 pagesCPD - SampleLe Anh DungNo ratings yet
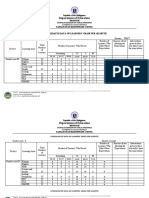
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocument4 pagesDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaNo ratings yet
- Design ProjectDocument60 pagesDesign Projectmahesh warNo ratings yet
- Service Quality Dimensions of A Philippine State UDocument10 pagesService Quality Dimensions of A Philippine State UVilma SottoNo ratings yet
- FINAL SMAC Compressor Control Philosophy Rev4Document6 pagesFINAL SMAC Compressor Control Philosophy Rev4AhmedNo ratings yet
- Stress Management HandoutsDocument3 pagesStress Management HandoutsUsha SharmaNo ratings yet
- Radio Ac DecayDocument34 pagesRadio Ac DecayQassem MohaidatNo ratings yet
- Cash Flow July 2021Document25 pagesCash Flow July 2021pratima jadhavNo ratings yet
- CHAPTER 2 Part2 csc159Document26 pagesCHAPTER 2 Part2 csc159Wan Syazwan ImanNo ratings yet
- Six Sigma PresentationDocument17 pagesSix Sigma PresentationDhular HassanNo ratings yet
- Engineering Management: Class RequirementsDocument30 pagesEngineering Management: Class RequirementsMigaeaNo ratings yet
- Government Hazi Muhammad Mohsin College Chattogram: Admission FormDocument1 pageGovernment Hazi Muhammad Mohsin College Chattogram: Admission FormThe Helper SoulNo ratings yet
- Etag 002 PT 2 PDFDocument13 pagesEtag 002 PT 2 PDFRui RibeiroNo ratings yet
- Tribes Without RulersDocument25 pagesTribes Without Rulersgulistan.alpaslan8134100% (1)
- Keeping Track of Your Time: Keep Track Challenge Welcome GuideDocument1 pageKeeping Track of Your Time: Keep Track Challenge Welcome GuideRizky NurdiansyahNo ratings yet
- Pitch DeckDocument21 pagesPitch DeckIANo ratings yet