You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- RF Circuit Design PDFDocument656 pagesRF Circuit Design PDFabc789159100% (3)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- 2019 Book IntroductionToDigitalSystemsDe PDFDocument551 pages2019 Book IntroductionToDigitalSystemsDe PDFSiete SieteNo ratings yet
- MK V HMI HardwareDocument26 pagesMK V HMI Hardwarenabil160874100% (1)
- Mathematical Modeling Approach For Flood ManagementDocument10 pagesMathematical Modeling Approach For Flood ManagementprjpublicationsNo ratings yet
- Mathematical Modeling Approach For Flood ManagementDocument10 pagesMathematical Modeling Approach For Flood ManagementprjpublicationsNo ratings yet
- Mems Based Optical Sensor For Salinity MeasurementDocument4 pagesMems Based Optical Sensor For Salinity MeasurementprjpublicationsNo ratings yet
- An Approach To Design A Rectangular Microstrip Patch Antenna in S Band by TLM ModelDocument7 pagesAn Approach To Design A Rectangular Microstrip Patch Antenna in S Band by TLM ModelprjpublicationsNo ratings yet
- Preparation Gade and Idol Model For Preventing Multiple Spoofing Attackers in Wireless NetworksDocument9 pagesPreparation Gade and Idol Model For Preventing Multiple Spoofing Attackers in Wireless NetworksprjpublicationsNo ratings yet
- A Design and Simulation of Optical Pressure Sensor Based On Photonic Crystal in Sub-Micron RangeDocument8 pagesA Design and Simulation of Optical Pressure Sensor Based On Photonic Crystal in Sub-Micron RangeprjpublicationsNo ratings yet
- A Novel Modified Distributed Arithmetic Scheme For Lms Low Power and Reduced Area Fir Adaptive Filter ImplementationDocument11 pagesA Novel Modified Distributed Arithmetic Scheme For Lms Low Power and Reduced Area Fir Adaptive Filter ImplementationprjpublicationsNo ratings yet
- Implementation and Analysis of Multiple Criteria Decision Routing Algorithm For Wireless Sensor NetworkDocument8 pagesImplementation and Analysis of Multiple Criteria Decision Routing Algorithm For Wireless Sensor NetworkprjpublicationsNo ratings yet
- Pattern Recognition Using Video Surveillance For Wildlife ApplicationsDocument8 pagesPattern Recognition Using Video Surveillance For Wildlife Applicationsprjpublications100% (1)
- Precision Face Image Retrieval by Extracting The Face Features and Comparing The Features With Database ImagesDocument7 pagesPrecision Face Image Retrieval by Extracting The Face Features and Comparing The Features With Database ImagesprjpublicationsNo ratings yet
- Impact of Stress Management by Development of Emotional Intelligence in CMTS, BSNL, Tamilnadu Circle - A StudyDocument15 pagesImpact of Stress Management by Development of Emotional Intelligence in CMTS, BSNL, Tamilnadu Circle - A StudyprjpublicationsNo ratings yet
- Review of Three Categories of Fingerprint RecognitionDocument5 pagesReview of Three Categories of Fingerprint RecognitionprjpublicationsNo ratings yet
- Encryption Based Multi User Manner Secured Data Sharing and Storing in CloudDocument9 pagesEncryption Based Multi User Manner Secured Data Sharing and Storing in CloudprjpublicationsNo ratings yet
- Anempirical Study On The Performance of Self-Financing Engineering Colleges (Autonomous and Non-Autonomous) - Ateacher's PerspectiveDocument17 pagesAnempirical Study On The Performance of Self-Financing Engineering Colleges (Autonomous and Non-Autonomous) - Ateacher's PerspectiveprjpublicationsNo ratings yet
- A Secure Payment Scheme in Multihop Wireless Network by Trusted Node Identification MethodDocument7 pagesA Secure Payment Scheme in Multihop Wireless Network by Trusted Node Identification MethodprjpublicationsNo ratings yet
- Smes Role in Reduction of The Unemployment Problem in The Area Located in Saudis Northern BoardersDocument13 pagesSmes Role in Reduction of The Unemployment Problem in The Area Located in Saudis Northern BoardersprjpublicationsNo ratings yet
- Studies On Removal of Acid Orange 7 by Advanced Oxidation Process Using Uv and Hydrogen Peroxide (H2o2)Document8 pagesStudies On Removal of Acid Orange 7 by Advanced Oxidation Process Using Uv and Hydrogen Peroxide (H2o2)prjpublicationsNo ratings yet
- Extended Information Technology Enabled Service Quality Model For Life Insurance Services and Its Managerial ImplicationsDocument17 pagesExtended Information Technology Enabled Service Quality Model For Life Insurance Services and Its Managerial ImplicationsprjpublicationsNo ratings yet
- Reduction of Executive Stress by Development of Emotional Intelligence - A Study With Reference To CMTS, BSNL, TN CircleDocument18 pagesReduction of Executive Stress by Development of Emotional Intelligence - A Study With Reference To CMTS, BSNL, TN CircleprjpublicationsNo ratings yet
- The Role of Green Intellectual Capital Management in Acquiring Green Competitive Advantage For CompaniesDocument18 pagesThe Role of Green Intellectual Capital Management in Acquiring Green Competitive Advantage For Companiesprjpublications100% (1)
- Study On Gis Simulated Water Quality ModelDocument11 pagesStudy On Gis Simulated Water Quality ModelprjpublicationsNo ratings yet
- Influences of Child Endorsers On The ConsumersDocument9 pagesInfluences of Child Endorsers On The ConsumersprjpublicationsNo ratings yet
- Employee Spirituality and Job Engagement A Correlational Study Across Organizational HierarchyDocument19 pagesEmployee Spirituality and Job Engagement A Correlational Study Across Organizational HierarchyprjpublicationsNo ratings yet
- Faulty Node Recovery and Replacement Algorithm For Wireless Sensor NetworkDocument9 pagesFaulty Node Recovery and Replacement Algorithm For Wireless Sensor NetworkprjpublicationsNo ratings yet
- Ijcerd: Effect of Controlled Temperature (27°C-42°C) On Strength of M20 Grade of ConcreteDocument11 pagesIjcerd: Effect of Controlled Temperature (27°C-42°C) On Strength of M20 Grade of ConcreteprjpublicationsNo ratings yet
- A Study of Bacteriological Contamination ofDocument8 pagesA Study of Bacteriological Contamination ofprjpublicationsNo ratings yet
- 1effectofglassonstrengthofconcretesubjected 130701063605 Phpapp02Document12 pages1effectofglassonstrengthofconcretesubjected 130701063605 Phpapp02Bajrang GuptaNo ratings yet
- Comparison of Actual Release Schedule and OptimalDocument9 pagesComparison of Actual Release Schedule and OptimalprjpublicationsNo ratings yet
- Ijcerd: Effect of Controlled Temperature (27°C-42°C) On Strength of M20 Grade of ConcreteDocument11 pagesIjcerd: Effect of Controlled Temperature (27°C-42°C) On Strength of M20 Grade of ConcreteprjpublicationsNo ratings yet
- 1 Manufactured Sand, A Solution and An AlternativeDocument7 pages1 Manufactured Sand, A Solution and An AlternativeprjpublicationsNo ratings yet
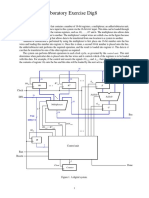
- Laboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataDocument6 pagesLaboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataMunya RushambwaNo ratings yet
- Sistem Narrowband Dan WidebandDocument4 pagesSistem Narrowband Dan Widebandarrizky ayu faradila purnamaNo ratings yet
- Panasonic Pcz1104070ce Tx-P42st30e tx-p42st30j tx-pf42st30 tx-pr42st30 Chassis Gpf14d-EDocument138 pagesPanasonic Pcz1104070ce Tx-P42st30e tx-p42st30j tx-pf42st30 tx-pr42st30 Chassis Gpf14d-EnovyNo ratings yet
- CS 152 Laboratory Exercise 1 (Directed Portion Only) : 1 Introduction and GoalsDocument15 pagesCS 152 Laboratory Exercise 1 (Directed Portion Only) : 1 Introduction and GoalsVinay PrasanthNo ratings yet
- Dse9150 9130 9155 9255 Data SheetDocument2 pagesDse9150 9130 9155 9255 Data SheetMohamed Salah Allam100% (1)
- Asic Interview QuestionsDocument2 pagesAsic Interview Questionspritam044No ratings yet
- Troubleshooting Panasonic Plasma TV Tcp42x1Document71 pagesTroubleshooting Panasonic Plasma TV Tcp42x1j25he4df5No ratings yet
- 3020Document4 pages3020Milan MilosavljevićNo ratings yet
- MMF60R580Q Datasheet v1.2 20210610Document10 pagesMMF60R580Q Datasheet v1.2 20210610Ferney Martinez Romero Martinez RomeroNo ratings yet
- Switchsync™ PWC600: Product GuideDocument16 pagesSwitchsync™ PWC600: Product GuideAlan ZanzeriNo ratings yet
- Rs20 Wiring DiagramDocument5 pagesRs20 Wiring Diagramthanhhai31No ratings yet
- Datasheet PDFDocument3 pagesDatasheet PDFJ. WilliamNo ratings yet
- DatasheetDocument30 pagesDatasheetMarwa BoukediNo ratings yet
- Street LightDocument49 pagesStreet LightnarendrabisoyiNo ratings yet
- DatasheetDocument1 pageDatasheetCalixto Milla EsauNo ratings yet
- A Simple Guide To Selecting Power MosfetsDocument3 pagesA Simple Guide To Selecting Power MosfetsJUNIOR700No ratings yet
- 6t SramDocument13 pages6t SramRekha KumariNo ratings yet
- Sony CFD s100lDocument11 pagesSony CFD s100lGeremias KunohNo ratings yet
- JVC Gr-Df470us SCHDocument54 pagesJVC Gr-Df470us SCHsonny_boy35_51147747No ratings yet
- True RMSDocument5 pagesTrue RMSnguyen van ANNo ratings yet
- Genti 17mb45m Service Manual PDFDocument44 pagesGenti 17mb45m Service Manual PDFSokol KadareNo ratings yet
- Edgefxkits Fullproject List PDFDocument31 pagesEdgefxkits Fullproject List PDFAhalya ReddyNo ratings yet
- Consensus Theorem in Boolean AlgebraDocument2 pagesConsensus Theorem in Boolean AlgebraSiva GuruNo ratings yet
- מעבדה למיקרו מחשבים- חוברת של החומר התיאורטי מאת שלמה אנגלברגDocument136 pagesמעבדה למיקרו מחשבים- חוברת של החומר התיאורטי מאת שלמה אנגלברגRonNo ratings yet
- Design of FMCW Radars For Active Safety Applications PDFDocument5 pagesDesign of FMCW Radars For Active Safety Applications PDFAnonymous LoJy6ERXdNo ratings yet
- Ar8600mk2 Manual ADocument147 pagesAr8600mk2 Manual ACoba LahNo ratings yet
- Ict Chapter 2Document9 pagesIct Chapter 2Izwan Jamaluddin33% (3)