You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Solar Energy: An Introduction to its Sources, Technologies and ApplicationsDocument45 pagesSolar Energy: An Introduction to its Sources, Technologies and Applicationsramji_kkpNo ratings yet
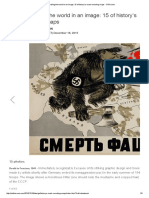
- Maps Reveal History's ComplexitiesDocument3 pagesMaps Reveal History's ComplexitiesBruno SilvaNo ratings yet
- Trump Revolt: Too Little Too Late?: Rivals Target Trump As He Cruises Into Super TuesdayDocument15 pagesTrump Revolt: Too Little Too Late?: Rivals Target Trump As He Cruises Into Super TuesdayBruno SilvaNo ratings yet
- North Korean Interiors: A Rare Glimpse Inside The Candy-Colored 'Socialist Fairyland'Document3 pagesNorth Korean Interiors: A Rare Glimpse Inside The Candy-Colored 'Socialist Fairyland'Bruno SilvaNo ratings yet
- Ene212 CH 15 Power SupplyDocument24 pagesEne212 CH 15 Power SupplyposktovaNo ratings yet
- CNN 17Document5 pagesCNN 17Bruno SilvaNo ratings yet
- Saudi Arabia Official: If All Else Fails, Remove Syria's Assad by ForceDocument4 pagesSaudi Arabia Official: If All Else Fails, Remove Syria's Assad by ForceBruno SilvaNo ratings yet
- These Women Saved Millions of Lives: Esra GurkanDocument2 pagesThese Women Saved Millions of Lives: Esra GurkanBruno SilvaNo ratings yet
- The Coolest Things You Can Do Underground in London: Roman Amphitheater, Guildhall Art GalleryDocument3 pagesThe Coolest Things You Can Do Underground in London: Roman Amphitheater, Guildhall Art GalleryBruno SilvaNo ratings yet
- CNN 9Document3 pagesCNN 9Bruno SilvaNo ratings yet
- North Korean Interiors: A Rare Glimpse Inside The Candy-Colored 'Socialist Fairyland'Document3 pagesNorth Korean Interiors: A Rare Glimpse Inside The Candy-Colored 'Socialist Fairyland'Bruno SilvaNo ratings yet
- CNN 12Document2 pagesCNN 12Bruno SilvaNo ratings yet
- CNN 13Document3 pagesCNN 13Bruno SilvaNo ratings yet
- CNN 10Document6 pagesCNN 10Bruno SilvaNo ratings yet
- Boko Haram Attacks Kill at Least 30, Locals SayDocument2 pagesBoko Haram Attacks Kill at Least 30, Locals SayBruno SilvaNo ratings yet
- Former Obama Intel Official: Hillary Clinton Should Drop OutDocument3 pagesFormer Obama Intel Official: Hillary Clinton Should Drop OutBruno SilvaNo ratings yet
- Haiti Gets New President ... For 120 Days: Regions +Document2 pagesHaiti Gets New President ... For 120 Days: Regions +Bruno SilvaNo ratings yet
- CNN 18Document2 pagesCNN 18Bruno SilvaNo ratings yet
- CNN 9Document3 pagesCNN 9Bruno SilvaNo ratings yet
- CNN 1Document4 pagesCNN 1Bruno SilvaNo ratings yet
- Thousands of Sharks Migrate Along Florida CoastDocument4 pagesThousands of Sharks Migrate Along Florida CoastBruno SilvaNo ratings yet
- Boko Haram Attacks Kill at Least 30, Locals SayDocument2 pagesBoko Haram Attacks Kill at Least 30, Locals SayBruno SilvaNo ratings yet
- CNN 19Document9 pagesCNN 19Bruno SilvaNo ratings yet
- Why Obama Voters Back Trump in NH PrimaryDocument4 pagesWhy Obama Voters Back Trump in NH PrimaryBruno SilvaNo ratings yet
- Cliff Collapses After Earthquake Strikes Near Christchurch, New ZealandDocument2 pagesCliff Collapses After Earthquake Strikes Near Christchurch, New ZealandBruno SilvaNo ratings yet
- CNNDocument15 pagesCNNBruno SilvaNo ratings yet
- CNN 21Document6 pagesCNN 21Bruno SilvaNo ratings yet
- CNN 23Document4 pagesCNN 23Bruno SilvaNo ratings yet
- Trump Refugee StanceDocument3 pagesTrump Refugee StanceBruno SilvaNo ratings yet
- CNN 11Document4 pagesCNN 11Bruno SilvaNo ratings yet
- CNN 12Document4 pagesCNN 12Bruno SilvaNo ratings yet
- 10 NM Technology PDFDocument9 pages10 NM Technology PDFGabriel DonovanNo ratings yet
- AY - XP 081013 CE AE-X 081013 BE S Manual 2004-s2Document52 pagesAY - XP 081013 CE AE-X 081013 BE S Manual 2004-s2José MacedoNo ratings yet
- Data Sheet TLC 110Document5 pagesData Sheet TLC 110luisoft88No ratings yet
- Nested-Current-Mirror Rail-to-Rail-Output Single-Stage Amplifier With Enhancements of DC Gain, GBW and Slew RateDocument14 pagesNested-Current-Mirror Rail-to-Rail-Output Single-Stage Amplifier With Enhancements of DC Gain, GBW and Slew Rateian neymarNo ratings yet
- Eee221 (SR) PPDocument15 pagesEee221 (SR) PPMehedi HasanNo ratings yet
- DS1621 Digital Thermometer and Thermostat GuideDocument16 pagesDS1621 Digital Thermometer and Thermostat GuideAnassFouadNo ratings yet
- Nanosheet Field Effect Transistors-A Next Generation Device To Keep Moore's Law Alive An Intensive StudyDocument12 pagesNanosheet Field Effect Transistors-A Next Generation Device To Keep Moore's Law Alive An Intensive StudyHung Lung ChienNo ratings yet
- Low Cost PCB Integrated 10 GB S OpticalDocument9 pagesLow Cost PCB Integrated 10 GB S Opticalsandee kumarNo ratings yet
- Lsa 36 - 4-Pole - Single-Phase: AlternatorsDocument15 pagesLsa 36 - 4-Pole - Single-Phase: AlternatorsJulio IllanesNo ratings yet
- Single Phase Half Wave Controlled ConverterDocument7 pagesSingle Phase Half Wave Controlled ConverterAlexNo ratings yet
- Electronics Corporation of Technology Consultant Services - WorldDocument5 pagesElectronics Corporation of Technology Consultant Services - WorldqwwqqqqqqqqqqNo ratings yet
- RTD Microchip AN687A - Pt100Document8 pagesRTD Microchip AN687A - Pt100ge_bdNo ratings yet
- Unit-I 2Document22 pagesUnit-I 2Federico AldoNo ratings yet
- 2N4416-Hifrequency Amp JFETDocument2 pages2N4416-Hifrequency Amp JFETsandhantusharNo ratings yet
- Advantages of Bridge Rectifier Circuit Over CenterDocument4 pagesAdvantages of Bridge Rectifier Circuit Over CenterLemuel C. FernandezNo ratings yet
- Incremental encoder EIL580 technical specsDocument7 pagesIncremental encoder EIL580 technical specsRahul ItaliyaNo ratings yet
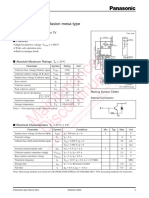
- C5884 PanasonicSemiconductorDocument3 pagesC5884 PanasonicSemiconductorsarauseopNo ratings yet
- Practice Question and You WillDocument5 pagesPractice Question and You WillAyush NinaweNo ratings yet
- FET and MOSFETDocument46 pagesFET and MOSFETKULWANT SINGHNo ratings yet
- NeilDocument47 pagesNeilAbbaas AlifNo ratings yet
- History of The I2C BusDocument24 pagesHistory of The I2C BusManoj Kavedia100% (1)
- Semi Lab 2Document17 pagesSemi Lab 2Fatima AmjadNo ratings yet
- 12f508 509 16f505Document98 pages12f508 509 16f505Leng SovannarithNo ratings yet
- Delta VFD-DD M EN 20120614Document141 pagesDelta VFD-DD M EN 20120614xuandung18No ratings yet
- 9A02305 Electrical CircuitsDocument8 pages9A02305 Electrical CircuitssivabharathamurthyNo ratings yet
- APM2054N: Pin Description FeaturesDocument12 pagesAPM2054N: Pin Description FeaturespotatoNo ratings yet
- Counters and Clocks: Building a Nixie ClockDocument12 pagesCounters and Clocks: Building a Nixie ClockJoseGarciaRuizNo ratings yet
- Flomat EngDocument8 pagesFlomat Engalex.amaral9292No ratings yet
- User Manual of The TENMA 72-7245 PDFDocument15 pagesUser Manual of The TENMA 72-7245 PDFHashan PereraNo ratings yet