You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Tekapur Pistolska Mega 65 Zimska enDocument2 pagesTekapur Pistolska Mega 65 Zimska enEzeval GráficaNo ratings yet
- Brochure For Structure 2021Document2 pagesBrochure For Structure 2021Miguel WindsorNo ratings yet
- FOI Finder - Rev01Document90 pagesFOI Finder - Rev01Muhammad Fahmmi Bin MahmudNo ratings yet
- SIA Scope of Service Matrix-20180814-For WebsiteDocument2 pagesSIA Scope of Service Matrix-20180814-For Websitesteven ZhaoNo ratings yet
- Motor Size SelectionDocument4 pagesMotor Size SelectionArnoah RamirezNo ratings yet
- Speedface-V5L (TD) : Face & Palm Verification and Body Temperature Detection TerminalDocument2 pagesSpeedface-V5L (TD) : Face & Palm Verification and Body Temperature Detection TerminalPanji NgadioNo ratings yet
- Four Best Uncensored AI Art GeneratorsDocument16 pagesFour Best Uncensored AI Art Generatorsmoneygain4ever100% (1)
- 18-12-07 Rieckermann Indonesia LNG EXTERNAL TMKDocument34 pages18-12-07 Rieckermann Indonesia LNG EXTERNAL TMKadiNo ratings yet
- Genmath q1 Mod8 TheDomainandRangeofRationalFunctions v2Document27 pagesGenmath q1 Mod8 TheDomainandRangeofRationalFunctions v2ALLIA LOPEZNo ratings yet
- Structure and Detailed Syllabus - IT (5th Sem To 8th Sem)Document72 pagesStructure and Detailed Syllabus - IT (5th Sem To 8th Sem)Randy OrtonNo ratings yet
- MGS1600GY: Precision Magnetic Track Following Sensor With GyrosopeDocument21 pagesMGS1600GY: Precision Magnetic Track Following Sensor With GyrosopeDwi SaputroNo ratings yet
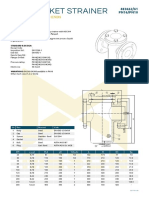
- 61 PN16 PN10Document1 page61 PN16 PN10Vishant AsolkarNo ratings yet
- BMW 1 Series Coupé/Cabrio (E81/E82/E87/E88), 3 Series (E90/E92/E93), Z4 (E89) OBDII + ECU ConnectionDocument7 pagesBMW 1 Series Coupé/Cabrio (E81/E82/E87/E88), 3 Series (E90/E92/E93), Z4 (E89) OBDII + ECU Connectionabdull rehmanNo ratings yet
- Assessment Ers5900Document7 pagesAssessment Ers5900Asma AsmaNo ratings yet
- NVOC Advisory No. 158Document2 pagesNVOC Advisory No. 158Pearly RederaNo ratings yet
- Hdpe Versus FRPDocument4 pagesHdpe Versus FRPAshok NarayanNo ratings yet
- Tiny Tweaks James WedmoreDocument31 pagesTiny Tweaks James WedmoreErise Global100% (1)
- Suasana Sekolah Bari Raya-Score and PartsDocument17 pagesSuasana Sekolah Bari Raya-Score and PartsoAeonNo ratings yet
- 09 - Erosion Mechanisms Which Cause Boiler Tube FailureDocument40 pages09 - Erosion Mechanisms Which Cause Boiler Tube Failuremahati munnaNo ratings yet
- Philips Professional Lighting Price Effective Sept 2013Document103 pagesPhilips Professional Lighting Price Effective Sept 2013nageshwariNo ratings yet
- 3RS25001AW30 Datasheet enDocument5 pages3RS25001AW30 Datasheet enMusa MgazaNo ratings yet
- STQADocument54 pagesSTQADisha BhardwajNo ratings yet
- Installation Qualification (Iq) Protocol FOR Mechanical SifterDocument22 pagesInstallation Qualification (Iq) Protocol FOR Mechanical SiftercorneliusNo ratings yet
- RAPORT CE Dec 2019 - Renovarea Cladirilor in UEDocument89 pagesRAPORT CE Dec 2019 - Renovarea Cladirilor in UETroi LauraNo ratings yet
- COOLPLUS-Water Cooled Heat ExchangerDocument10 pagesCOOLPLUS-Water Cooled Heat ExchangerCOOLPLUS OIL COOLERNo ratings yet
- On A/C All: Reference Qty DesignationDocument21 pagesOn A/C All: Reference Qty DesignationRalph FernandesNo ratings yet
- Cgma ProgramsDocument22 pagesCgma ProgramsKunal RanaNo ratings yet
- Nocchi Pentair Pompe VLRDocument14 pagesNocchi Pentair Pompe VLRThomas MyszkaNo ratings yet
- Computer Memory Contingent On The Protein Bacterio RhodopsinDocument26 pagesComputer Memory Contingent On The Protein Bacterio Rhodopsinak562192No ratings yet
- Masterseal 901: Vinyl Ester Methacrylate Resin For Crack Injection Via Injection Hoses and PackersDocument2 pagesMasterseal 901: Vinyl Ester Methacrylate Resin For Crack Injection Via Injection Hoses and PackersMadhu RaiNo ratings yet